Отображенная подвеска твердой оси
Динамика автомобиля Blockset/Подвеска
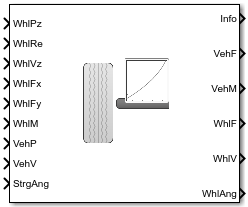
Блок Solid Axle Suspension - Mapped реализует отображенную подвеску твердой оси для нескольких осей с несколькими дорожками на ось.
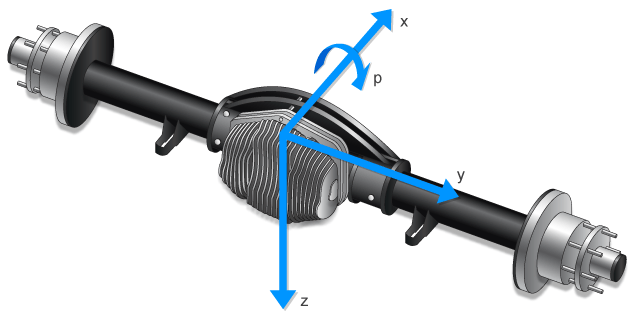
Блок моделирует податливость подвески, демпфирование и геометрические эффекты как функции положения и скорости дорожки с параметрами податливости и демпфирования оси. Используя положение и скорость дорожки, блок вычисляет положение вертикальной дорожки и силы подвески на транспортном средстве и колесе. Блок использует Z-down (заданный в J670 SAE) и систему координат оси твердого тела. Система координат твердой оси, показанная здесь, выровнена с системой координат Z-вниз транспортного средства, с осью X в направлении движения вперед транспортного средства.
| Для каждого | Вы можете задать |
|---|---|
|
Ось |
|
|
След |
|
Блок содержит накопительные энергию пружинные элементы и рассеивающие энергию демпферные элементы. Блок также сохраняет энергию через угловое ускорение крена оси и центр оси масс вертикального и бокового ускорения.
В этой таблице представлены параметры блоков настройки для транспортного средства с:
Две оси.
По две дорожки на ось.
Вход угла поворота для обеих трасс на передней оси.
| Параметр | Настройка |
|---|---|
| Number of axles, NumAxl |
|
Number of tracks by axle, NumTracksByAxl |
|
| Steered axle enable by axle, StrgEnByAxl |
|
Блок использует интерполяционную таблицу, которая связывает вертикальное демпфирование и податливость с высотой подвески, скоростью изменения высоты подвески и углом поворота руля. Можно калибровать интерполяционную таблицу сил колеса так, чтобы изменения угла поворота руля от номинального центрального положения генерировали силу, которая увеличивает высоту транспортного средства. В частности, блок:
Использование | Вычислять |
|---|---|
|
|
Чтобы вычислить динамику оси, блок реализует эти уравнения. Блок пренебрегает эффектами:
Боковая и продольная поступательная скорость.
Скорость вращения вокруг вертикальной и боковой осей.
Для сил и моментов блок использует интерполяционные таблицы.
Силы подвески и моменты, приложенные к транспортному средству, равны силам подвески и моментам, приложенным к колесу.
В уравнениях используются эти переменные.
| Fwza,t, Mwza,t | Сила подвески и момент, приложенные к колесу на оси |
| Fwxa,t, Mwxa,t | Сила подвески и момент, приложенные к колесу на оси |
| Fwya,t, Mwya,t | Сила подвески и момент, приложенные к колесу на оси |
| Fvza,t, Mvza,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fvxa,t, Mvxa,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fvya,t, Mvya,t | Сила подвески и момент, приложенные к транспортному средству на оси |
| Fz0a | Вертикальная подвеска предварительного поджатия пружины примененная к колесам на оси |
| kza | Вертикальный коэффициент упругости, применяемое к рельсам на оси |
| mhsteera | Угол поворота к наклону вертикальной силы, приложенный к колесу для треков на оси |
| δsteera,t | Вход угла поворота для |
| cza | Вертикальная демпфирующая константа, применяемая к рельсам на оси |
| Rewa,t | Эффективный радиус колеса для |
| Fzhstopa,t | Вертикальное усилие упора на оси |
| Fzaswya,t | Вертикальное противовыбросовое усилие на оси |
| zva,t, żva,t | Перемещение и скорость транспортного средства на оси |
| zwa,t, żwa,t | Перемещение пути и скорость на оси |
| xva,t, ẋva,t | Перемещение и скорость транспортного средства на оси |
| xwa,t, ẋwa,t | Перемещение пути и скорость на оси |
| yva,t, ẏva,t | Перемещение и скорость транспортного средства на оси |
| ywa,t, ẏwa,t | Перемещение пути и скорость на оси |
| Ha,t | Высота подвески на оси |
| Rewa,t | Эффективный радиус колеса на оси a, отслеживать t |
Чтобы вычислить развал, кастер и углы носка, блок использует интерполяционную таблицу, Galookup, которая является функцией высоты подвески и угла поворота руля.
В уравнениях используются эти переменные.
| ξa,t | Угол развала колеса на оси |
| ηa,t | Угол наклона колеса на оси |
| ζa,t | Угол наклона колеса на оси |
| δsteera,t | Вход угла поворота для |
| zva,t | Перемещение транспортного средства на оси |
| zwa,t | Перемещение колеса на оси |
Вы также можете вводить углы поворота для дорожек. Чтобы вычислить углы поворота колес, блок смещает входные углы поворота как функцию от высоты подвески. Для вычисления блок использует интерполяционную таблицу, Galookup, которая является функцией положения подвески и угла поворота руля.
В уравнении используются эти переменные.
| δwhlsteera,t |
Угол поворота колеса для |
| δsteera,t |
Вход угла поворота для |
| zva,t |
Перемещение транспортного средства на оси |
| zwa,t |
Перемещение колеса на оси |
Блок вычисляет эти характеристики подвески для каждой оси, a, трек, t.
| Вычисление | Уравнение |
|---|---|
Рассеянная степень, Psuspa,t |
|
Поглощенная энергия, Esuspa,t |
|
Высота подвески, Ha,t |
|
Расстояние от центра колеса до интерфейса шина/дорога |
|
В уравнениях используются эти переменные.
| mhsteera | Угол поворота к наклону вертикальной силы, приложенный к колесу для треков на оси |
| δsteera,t | Вход угла поворота для |
| Rewa,t | Ось |
| f_susp_dz_bp | Точки останова высоты подвески по вертикальной оси |
| zwtra,t | Расстояние от центра колеса до интерфейса шина/дорога, вдоль фиксированной оси Z автомобиля |
| zva,t, żva,t | Перемещение и скорость транспортного средства на оси |
| zwa,t, żwa,t | Перемещение пути и скорость на оси |
[1] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Общество автомобильных инженеров, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. J670 SAE. Warrendale, PA: Общество автомобильных инженеров, 2008.
[3] Технический комитет. Дорожные транспортные средства - Динамика аппарата и способность удерживать дороги - Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011 год.
Solid Axle Suspension | Solid Axle Suspension - Coil Spring | Solid Axle Suspension - Leaf Spring
