Двухосное транспортное средство в движении вперед и назад
Блок-набор силовых агрегатов/динамика автомобиля
Динамика автомобиля транспортное средство
Блок Vehicle Body 1DOF Longitudinal реализует твердый корпус транспортного средства с одной степенью свободы (1DOF) с постоянной массой, подвергающейся продольному (то есть прямому и реверсивному) движению. Используйте блок:
В исследованиях экономии электроэнергии и топлива для представления инерционных нагрузок транспортного средства и сопротивления, когда передача веса от вертикальных и наклонных движений незначительны.
Для определения крутящего момента и степени двигателя, необходимой транспортному средству для следования заданному циклу привода.
Можно выбрать опции блока, чтобы создать входные порты для внешних сил, моментов, температуры воздуха и скорости ветра.
| Настройка опций блоков | External Input Ports | Описание |
|---|---|---|
External forces |
| Внешняя сила, приложенная к CG транспортного средства в неподвижной системе координат транспортного средства. |
External moments |
| Внешний момент на CG транспортного средства в неподвижной системе координат транспортного средства. |
Air temperature |
| Температура окружающего воздуха. Рассмотрите эту опцию, если вы хотите изменить температуру во время выполнения. |
Wind X,Y,Z |
| Скорость ветра вдоль фиксированных по земле осей X -, Y - и Z. Если вы не выбираете эту опцию, блок реализует входной порт |
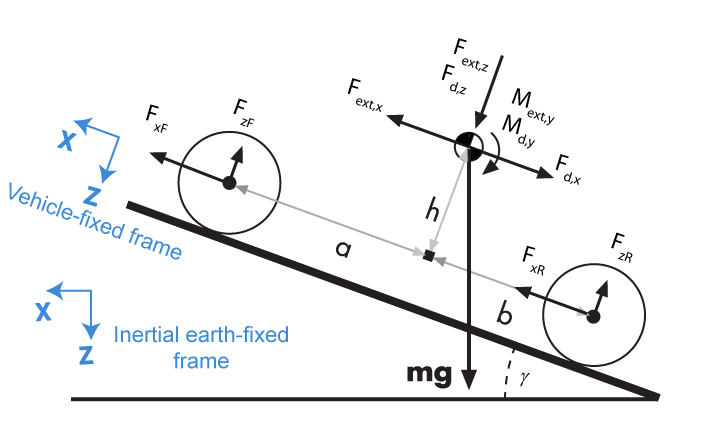
Оси транспортного средства параллельны и образуют плоскость. Продольное направление лежит в этой плоскости и перпендикулярно осям. Если транспортное средство двигается по наклонному склону, нормальное направление не параллельно гравитации, но всегда перпендикулярно продольной плоскости оси.
Блок использует чистый эффект всех сил и крутящих моментов, действующих на него, чтобы определить движение транспортного средства. Продольные усилия шин толкают транспортное средство вперед или назад. Вес транспортного средства действует через центр тяжести (CG). Угол уклона изменяет направление разрешенной гравитационной силы, действующей на CG транспортного средства. Аналогично, блок устраняет сопротивление аэродинамической силы сопротивления на транспортном средстве CM.
Блок Vehicle Body 1DOF Longitudinal реализует эти уравнения.
Нулевое нормальное ускорение и крутящий момент нулевого тангажа определяют нормальную силу на каждой передней и задней осях.
Нормальные силы колеса удовлетворяют этому уравнению.
Блок вычитает скорости ветра из компонентов скорости транспортного средства, чтобы получить чистую относительную воздушную скорость. Чтобы вычислить силу сопротивления и моменты, действующие на транспортное средство, блок использует чистую относительную воздушную скорость.
По умолчанию, чтобы вычислить скорость ветра вдоль фиксированной по оси X машины, блок использует продольную скорость ветра вдоль фиксированной по земле оси X. Если вы выбираете WindX,Y,Z, блок использует скорость ветра вдоль фиксированных по земле осей X-, Y-, Z.
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Внешне приложенная степень | |
| Продольная сила степени приложенная к передней оси | |||
| Продольная сила степени приложенная к задней оси | |||
|
|
| Перетащите мышью степени | ||
|
|
| Изменение скорости в гравитационной потенциальной энергии | ||
| Скорость изменения продольной кинетической энергии | |||
В уравнениях используются эти переменные.
| Fxf, Fxr | Продольные силы на каждом колесе в передней и задней точках контакта с землей, соответственно |
| Fzf, Fzr | Нормальные силы нагрузки на каждое колесо в передней и задней точках контакта с землей, соответственно |
| FwF, FwR | Продольная сила на передней и задней осях вдоль фиксированной оси X автомобиля |
| FxExt, FwR | Внешняя сила вдоль фиксированной оси X автомобиля |
| Fd,x, Fd,z | Продольная и нормальная сила сопротивления на транспортном средстве CG |
| Md,y | Крутящий момент из-за перетаскивания транспортного средства вокруг фиксированной по оси Y автомобиля |
| Fd | Аэродинамическая сила сопротивления |
| Vx | Скорость транспортного средства. Когда Vx > 0, транспортное средство движется вперед. Когда Vx < 0, транспортное средство движется назад. |
| Nf, Nr | Количество колес на передней и задней осях, соответственно |
Угол уклона дороги | |
| m | Масса кузова транспортного средства |
| a, b | Расстояние между передней и задней осями, соответственно, от точки нормальной проекции CG транспортного средства до плоскости общей оси |
| h | Высота CG транспортного средства над плоскостью оси |
| Cd | Коэффициент лобового сопротивления воздуха |
| Af | Фронтальная область |
| Pabs | Абсолютное давление |
| ρ | Массовая плотность воздуха |
| x, , | Продольное положение, скорость и ускорение транспортного средства вдоль фиксированной оси X |
| wx | Скорость ветра вдоль фиксированной оси X автомобиля |
Вертикальная скорость транспортного средства вдоль фиксированной оси Z |
Блок Vehicle Body 1DOF Longitudinal позволяет моделировать только продольную динамику, параллельную земле и ориентированную вдоль направления движения. Транспортное средство принято в тангаже и нормальном равновесии. Блок не моделирует тангаж или вертикальное движение. Чтобы смоделировать транспортное средство с тремя степенями свободы (DOF), используйте Vehicle Body 3DOF Longitudinal.
