Движение транспортного средства с использованием коэффициентов проверки «берег вниз»
Блок-набор силовых агрегатов/динамика автомобиля
Динамика автомобиля транспортное средство
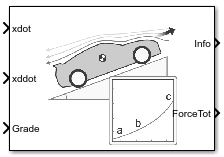
Блок Vehicle Body Total Road Load реализует модель жёсткого транспортного средства с одной степенью свободы (1DOF), используя коэффициенты проверки вниз по побережью. Можно использовать этот блок в модели транспортного средства, чтобы представлять нагрузку, которую приводная линия и шасси применяются к трансмиссии или двигателю. Он подходит для эффективности на уровне системы, калибровки компонентов, экономии топлива или отслеживания цикла привода. Блок вычисляет динамическую нагрузку на силовой агрегат с минимальными параметризацией или вычислительными затратами.
Можно сконфигурировать блок для кинематического, силового или общего входного входа степени.
Кинематический - Блок использует продольную скорость и ускорение транспортного средства, чтобы вычислить тяговую силу и степень.
Сила - Блок использует тяговую силу, чтобы вычислить транспортное средство продольное перемещение и скорость.
Степень - Блок использует степень двигателя или трансмиссии, чтобы вычислить продольный объем и скорость транспортного средства.
Чтобы вычислить общую дорожную нагрузку, действующую на транспортное средство, блок реализует это уравнение.
Чтобы определить коэффициенты a, b и c, можно использовать процедуру тестирования, подобную процедуре, описанной в «Измерение дорожной нагрузки» и «Симуляция динамометра» с использованием методов прибрежного бурения. Можно также использовать Simulink® Проектируйте Optimization™, чтобы соответствовать коэффициентам к измеренным данным.
Чтобы вычислить транспортное средство движение, блок использует закон Ньютона для твердых тел.
Общая степень входа является продуктом от общей силы и продольной скорости. Степень, обусловленная дорожными и гравитационными силами, является продуктом дорожной силы и продольной скорости.
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Внешне приложенная степень | PFxExt | |
|
| PwrFxDrag | Перетащите мышью степени | PD | ||
|
| wrStoredGrvty | Изменение скорости в гравитационной потенциальной энергии | Pg | ||
PwrStoredxdot | Скорость изменения продольной кинетической энергии | Pxdot | |||
В уравнениях используются эти переменные.
| a | Коэффициент сопротивления качению в установившемся режиме |
| b | Вязкий приводной канал и коэффициент сопротивления качению |
| c | Коэффициент аэродинамического сопротивления |
| g | Ускорение свободного падения |
| x | Продольное перемещение транспортного средства относительно земли в неподвижной системе координат транспортного средства |
Продольная скорость транспортного средства относительно земли, в неподвижной системе координат автомобиля | |
Продольный разгон транспортного средства относительно земли, неподвижная система координат автомобиля | |
| m | Масса кузова транспортного средства |
| Θ | Угол уклона дороги |
| Ftotal | Общая сила, действующая на транспортное средство |
| Froad | Сопротивление дорожной нагрузки из-за потерь и гравитационной нагрузки |
| Ptotal | Общая тяговая входная степень |
| Proad | Общая степень из-за потерь и гравитационной нагрузки |
Вертикальная скорость транспортного средства вдоль неподвижного |
[1] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.
[2] Комитет по эффективности и экономии легких транспортных средств. Измерение дорожной нагрузки и симуляция динамометра с использованием методов прибрежного бурения. Стандартные J1263_201003. SAE International, март 2010 года.
