Вычислите величину и угол фазы комплексного сигнала – оптимизированный для генерации HDL-кода с помощью алгоритма CORDIC
Поддержка HDL DSP System Toolbox / Математические функции
Блок Complex to Magnitude-Angle HDL Optimized вычисляет величину и угол фазы комплексного сигнала и обеспечивает благоприятные для оборудования управляющие сигналы. Чтобы достигнуть эффективной реализации HDL, блок использует конвейерный Координатный Компьютер Вращения (CORDIC) алгоритм.
Можно использовать этот блок, чтобы реализовать операции такой как atan2 в оборудовании.
Блок генерирует конвейерную архитектуру HDL, чтобы максимизировать пропускную способность. Каждая итерация CORDIC сделана в одной настройке канала связи. Множитель усиления, если включено, реализован с логикой канонической цифры со знаком (CSD).
Если вы используете векторный вход, этот блок реплицирует эту архитектуру параллельно для каждого элемента вектора.

Следующая таблица показывает Magnitude и Angle размер слова (WL) выхода для конкретного входного размера слова (WL). FL обозначает дробную длину, используемую в представлении фиксированной точки.
| Введите размер слова | Выведите размер слова величины |
|---|---|
| fixdt (0, WL, FL) | fixdt (0, WL + 2, FL) |
| fixdt (1, WL, FL) | fixdt (1, WL + 1, FL) |
| Введите размер слова | Выведите угловой размер слова | |
|---|---|---|
| fixdt ([], WL, FL) | Радианы | fixdt (1, WL + 3, WL) |
| 'normalized' | fixdt (1, WL + 3, WL+2) | |
Логика CORDIC при каждой настройке канала связи реализует одну итерацию. Для каждой настройки канала связи сдвиг и угловое вращение являются константами.
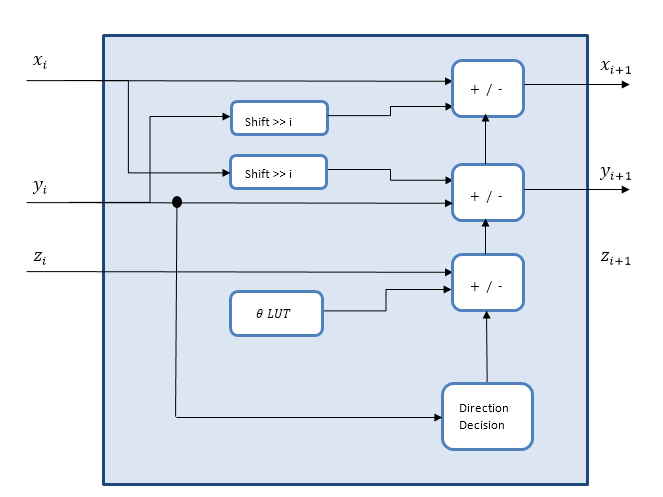
Когда вы устанавливаете Output format на Magnitude, блок не генерирует HDL-код для углового накопления и квадрантной логики коррекции.
Этот формат нормирует угловые значения радиана фиксированной точки вокруг модульного круга. Это использование битов может быть более эффективным, чем использование области значений [0, 2π] радианы. Также этот нормированный угловой формат включает перенос угла в 0, или 2π без дополнительного обнаруживают и корректируют логику.
Например, представляя угол результатами на 3 бита в этих нормированных значениях.
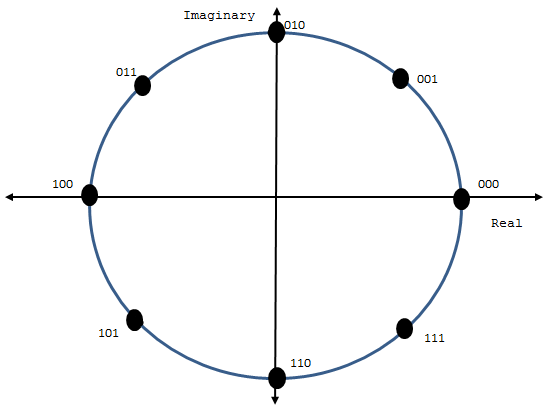
Блок нормирует углы через [0, π/4] и сопоставляет их с правильным октантом в конце вычисления.
Complex to Magnitude-Angle (Simulink) | dsp.HDLComplexToMagnitudeAngle | atan2


