Sensor Fusion and Tracking Toolbox™ позволяет инерциальным измерительным блокам (IMU) модели, Системам глобального позиционирования (GPS) и инерционным системам навигации (INS). Можно смоделировать определенное оборудование путем установки свойств моделей к значениям от аппаратных таблиц данных. Можно настроить экологические и шумовые свойства подражать реальным средам. Можно использовать эти модели, чтобы протестировать и подтвердить алгоритмы сплава или как заполнителей при разработке объемных приложений.
Этот пример предоставляет обзор инерционного датчика и модели GPS в Sensor Fusion and Tracking Toolbox.

Чтобы изучить, как сгенерировать движение основной истины, которое управляет моделями датчика, смотрите waypointTrajectory и kinematicTrajectory. Для примера при объединении инерционных данных о датчике смотрите, Определяют Ориентацию Используя Инерционные Датчики.
IMU является электронным устройством, смонтированным на платформе. IMU состоит из отдельных датчиков, которые сообщают различную информацию о движении платформы. IMUs комбинируют несколько датчиков, которые могут включать акселерометры, гироскопы и магнитометры.
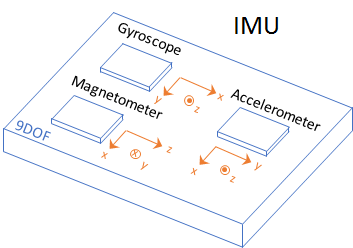
С этим тулбоксом измерения, возвращенные в модель IMU, используют следующий модуль и координируют соглашения.
| Вывод | Описание | Модули | Система координат |
|---|---|---|---|
| Ускорение | Текущее чтение акселерометра | m/s2 | Корпус датчика |
| Скорость вращения | Текущее чтение гироскопа | рад/с | Корпус датчика |
| Магнитное поле | Текущее чтение магнитометра | μT | Корпус датчика |
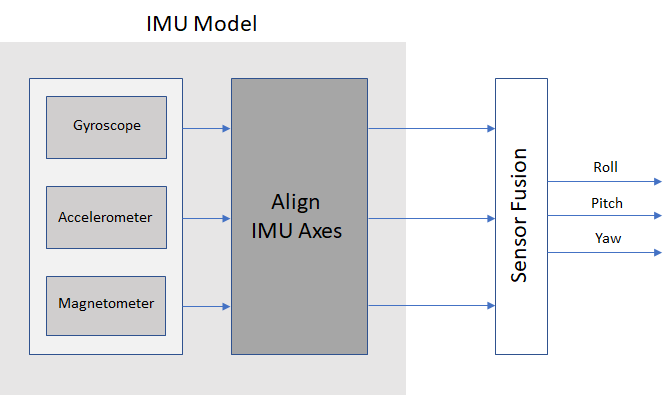
Обычно, данные, возвращенные IMUs, объединены вместе и интерпретированы как крен, тангаж и рыскание платформы. Реальные датчики IMU могут иметь различные оси для каждого из отдельных датчиков. Модели, предоставленные Sensor Fusion and Tracking Toolbox, принимают, что отдельные оси датчика выравниваются.
Чтобы создать модель датчика IMU, используйте imuSensor Система object™.
IMU = imuSensor
IMU =
imuSensor with properties:
IMUType: 'accel-gyro'
SampleRate: 100
Temperature: 25
Accelerometer: [1×1 accelparams]
Gyroscope: [1×1 gyroparams]
RandomStream: 'Global stream'Модель IMU по умолчанию содержит идеальный акселерометр и идеальный гироскоп. accelparams и gyroparams объекты задают настройка гироскопа и акселерометр. Можно установить свойства этих объектов подражать определенному оборудованию и средам. Для получения дополнительной информации об объектах параметра IMU смотрите accelparams, gyroparams, и magparams.
К модели, получающей данные о датчике IMU, вызовите модель IMU с ускорением основной истины и скоростью вращения платформы:
trueAcceleration = [1 0 0]; trueAngularVelocity = [1 0 0]; [accelerometerReadings,gyroscopeReadings] = IMU(trueAcceleration,trueAngularVelocity)
accelerometerReadings =
-1.0000 0 9.8100
gyroscopeReadings =
1 0 0Можно сгенерировать траектории основной истины, которые вы вводите к модели IMU с помощью kinematicTrajectory и waypointTrajectory.
Система глобального позиционирования (GPS) обеспечивает 3-D информацию о положении для платформ (приемники) на поверхности Земли.
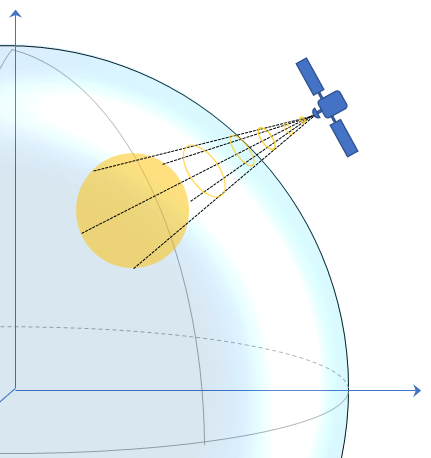
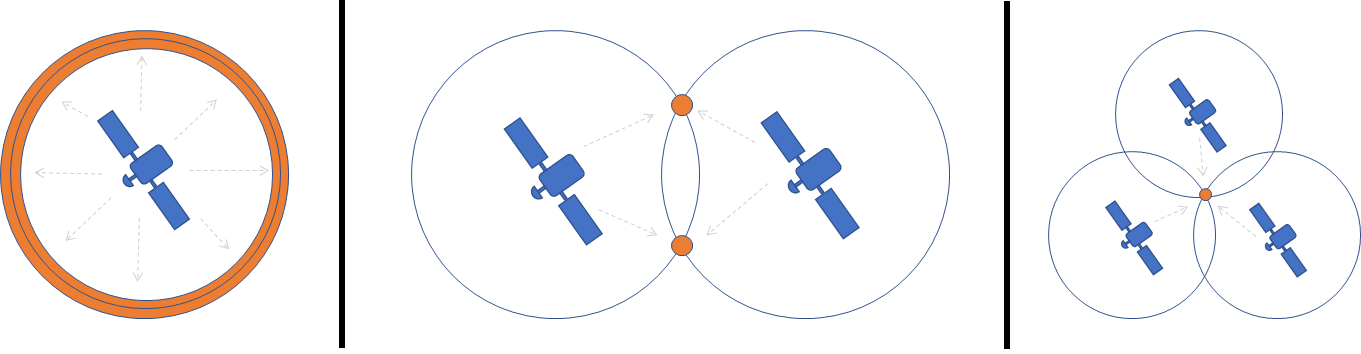
GPS состоит из созвездия спутников, которые постоянно вращаются вокруг земли. Спутники обеспечивают настройку, таким образом, что платформа всегда в рамках представления по крайней мере четырех спутников. Путем измерения времени полета сигналов от спутников до платформы положение платформы может быть trilaterated. Спутники добавляют метку времени к широковещательному сигналу, который сравнивается с часами платформы на получение. Три спутника требуются, чтобы trilaterate положение в трех измерениях. Четвертый спутник требуется, чтобы корректировать для ошибок тактовой синхронизации между платформой и спутниками.
Симуляция GPS, обеспеченная моделями Sensor Fusion and Tracking Toolbox платформа (приемник) данные, которые были уже обработаны и интерпретированы как высота, широта, долгота, скорость, groundspeed, и курс.
Измерения, возвращенные в модель GPS, используют следующий модуль и координируют соглашения.
| Вывод | Описание | Модули | Система координат |
|---|---|---|---|
| LLA | Текущее глобальное положение, читающее в геодезических координатах, на основе модели wgs84Ellipsoid Earth | степени (широта), степени (долгота), метры (высота) | LLA |
| Скорость | Текущая скорость, читающая из GPS | m/s | локальный NED |
| Groundspeed | Текущий groundspeed, читающий из GPS | m/s | локальный NED |
| Курс | Текущий курс, читающий из GPS | степени | локальный NED |
Модель GPS позволяет вам установить высокоуровневую точность и шумовые параметры, а также частоту обновления приемника и ссылочное местоположение.
Чтобы создать модель GPS, используйте gpsSensor Системный объект.
GPS = gpsSensor
GPS =
gpsSensor with properties:
UpdateRate: 1 Hz
ReferenceLocation: [0 0 0] [deg deg m]
HorizontalPositionAccuracy: 1.6 m
VerticalPositionAccuracy: 3 m
VelocityAccuracy: 0.1 m/s
RandomStream: 'Global stream'
DecayFactor: 0.999 К модели, получающей данные о датчике GPS, вызовите модель GPS с положением основной истины и скоростью платформы:
truePosition = [1 0 0]; trueVelocity = [1 0 0]; [LLA,velocity,groundspeed,course] = GPS(truePosition,trueVelocity)
LLA =
0.0000 0.0000 0.3031
velocity =
1.0919 -0.0008 -0.1308
groundspeed =
1.0919
course =
359.9566 Можно сгенерировать траектории основной истины, которые вы вводите к модели GPS с помощью kinematicTrajectory и waypointTrajectory.
Инерционная система навигации (INS) использует инерционные датчики как найденные на IMU: акселерометры, гироскопы и магнитометры. INS объединяет инерционные данные о датчике, чтобы вычислить положение, ориентацию и скорость платформы. INS/GPS использует данные о GPS, чтобы откорректировать INS. Как правило, INS и показания GPS сплавлены с расширенным Фильтром Калмана, где показания INS используются на шаге предсказания, и показания GPS используются на шаге обновления. Общее использование для INS/GPS является точным расчетом траектории, когда сигнал GPS ненадежен.
"INS/GPS" относится к целой системе, включая фильтрацию. Симуляция INS/GPS, обеспеченная моделями Sensor Fusion and Tracking Toolbox INS/GPS и, возвращает положение, скорость и ориентацию, о которой сообщают инерционные датчики и GPS-приемник на основе движения основной истины.
Измерения, возвращенные в INS/GPS, используют следующий модуль и координируют соглашения.
| Вывод | Описание | Модули | Система координат |
|---|---|---|---|
| Положение | Текущее положение, читающее из INS/GPS | метры | локальный NED |
| Скорость | Текущая скорость, читающая из INS/GPS | m/s | локальный NED |
| Ориентация | Текущая ориентация, читающая из INS/GPS | кватернион или матрица вращения | N/A |
Чтобы создать модель INS/GPS, используйте insSensor Системный объект. Можно смоделировать реальную систему INS/GPS путем настройки точности объединенных данных: прокрутитесь, сделайте подачу, отклоняйтесь от курса, расположите, и скорость.
INS = insSensor
INS =
insSensor with properties:
RollAccuracy: 0.2 deg
PitchAccuracy: 0.2 deg
YawAccuracy: 1 deg
PositionAccuracy: 1 m
VelocityAccuracy: 0.05 m/s
RandomStream: 'Global stream' К модели, получающей данные о датчике INS/GPS, вызовите модель INS/GPS с положением основной истины и скоростью и ориентацией платформы:
trueMotion = struct( ... 'Position',[0 0 0], ... 'Velocity',[0 0 0], ... 'Orientation',quaternion(1,0,0,0)); measurement = INS(trueMotion)
measurement =
struct with fields:
Orientation: [1×1 quaternion]
Position: [0.2939 -0.7873 0.8884]
Velocity: [-0.0574 -0.0534 -0.0405]imuSensor | gpsSensor | insSensor
