Якобиан постоянной угловой скорости вращения прямоугольная целевая модель измерения
jacobian = ctrectmeasjac(state,detections)state и detections.
state — Текущее прямоугольное целевое состояниеТекущее прямоугольное целевое состояние в виде 7 1 вектора с действительным знаком. Семь размерных прямоугольных целевых состояний заданы как [x; y; s; θ; ω; L; W. Значение этих переменных и их модулей:
| Переменная | Значение | Модуль |
| x | Положение прямоугольника сосредотачивается в направлении x | m |
| y | Положение прямоугольника сосредотачивается в направлении y | m |
| s | Скорость в направляющемся направлении | m/s |
| θ | Угол ориентации прямоугольника относительно направления x | градус |
| ω | Угловая скорость вращения | degree/s |
| L | Длина прямоугольника | m |
| W | Ширина прямоугольника | m |
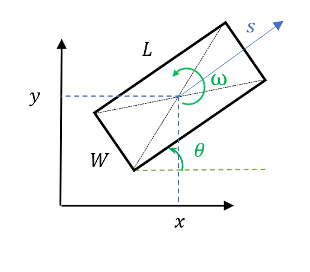
Пример: [1;2;2;30;1;4.7;1.8]
Типы данных: single | double
detections — Обнаружения целиobjectDetection объектыОбнаружения цели в виде 1 M массивом ячеек objectDetection объекты. MeasurementParameters свойство (который задает преобразование от пространства состояний до пробела измерения) для каждого объекта должно быть тем же самым для всех обнаружений в массиве ячеек.
trackerPHD | gmphd | ctrect | ctrectmeas | ctrectjac | initctrectgmphd | ctrectcorners
