Мультидатчик, средство отслеживания мультиобъекта PHD
trackerPHD Система object™ является средством отслеживания, способным к обработке обнаружений нескольких целей от нескольких датчиков. Средство отслеживания использует мультицелевой фильтр плотности гипотезы вероятности (PHD), чтобы оценить состояния целей точки и расширенных объектов. PHD является функцией, определяемой по пространству состояний системы слежения, и ее значение в состоянии задано как ожидаемое количество целей на модульный объем пространства состояний. PHD представлен взвешенным суммированием (смесь) функций плотности вероятности и достигает максимума в PHD, соответствуют возможным целям. Для обзора того, как средство отслеживания функционирует, см. Алгоритмы.
По умолчанию, trackerPHD может отследить расширенные объекты с помощью ggiwphd отфильтруйте, какие обнаружения моделей от расширенного объекта, когда синтаксический анализ указывает облаку. Можно также использовать trackerPHD с gmphd фильтры, который отслеживает цели точки и расширенные объекты с обозначенными формами. Входные параметры к средству отслеживания являются отчетами обнаружения, сгенерированными objectDetection, fusionRadarSensor, irSensor, или sonarSensor объекты. Средство отслеживания выходные параметры все обеспеченные дорожки и их информация об анализе.
Отслеживать цели с помощью этого объекта:
Создайте trackerPHD объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?
tracker = trackerPHDtrackerPHD Системный объект со значениями свойств по умолчанию.
tracker = trackerPHD(Name,Value)trackerPHD('MaxNumTracks',100) создает средство отслеживания PHD, которое позволяет максимум 100 дорожек. Заключите каждое имя свойства в кавычки.
Чтобы обработать обнаружения и дорожки обновления, вызовите средство отслеживания с аргументами, как будто это была функция (описанный здесь).
confirmedTracks = tracker(detections,time)detections, во время обновления, time. Подтвержденные дорожки откорректированы и предсказаны ко времени обновления.
confirmedTracks = tracker(detections,config,time)config. Используйте этот синтаксис, когда настройки датчиков изменятся со временем. Чтобы включить этот синтаксис, установите HasSensorConfigurationsInput свойство к true.
[ также возвращает список предварительных дорожек, confirmedTracks,tentativeTracks,allTracks] = tracker(___)tentativeTracks, и список всех дорожек, allTracks. Можно использовать этот выходной синтаксис с любым из предыдущих входных синтаксисов.
[ также возвращает информацию об анализе, confirmedTracks,tentativeTracks,allTracks,analysisInformation] = tracker(___)analysisInformation, который может использоваться для анализа дорожки. Можно использовать этот выходной синтаксис с любым из предыдущих входных синтаксисов.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Настройте настройку датчика, создайте средство отслеживания PHD и питайте средство отслеживания обнаружениями.
% Create sensor configuration. Specify clutter density of the sensor and % set the IsValidTime property to true. configuration = trackingSensorConfiguration(1); configuration.ClutterDensity = 1e-7; configuration.IsValidTime = true; % Create a PHD tracker. tracker = trackerPHD('SensorConfigurations',configuration); % Create detections near points [5;-5;0] and [-5;5;0] at t=0, and % update the tracker with these detections. detections = cell(20,1); for i = 1:10 detections{i} = objectDetection(0,[5;-5;0] + 0.2*randn(3,1)); end for j = 11:20 detections{j} = objectDetection(0,[-5;5;0] + 0.2*randn(3,1)); end tracker(detections,0);
Обновите средство отслеживания снова после 0,1 секунд путем предположения, что цели перемещаются в постоянную скорость [1; 2; 0] модуль в секунду.
dT = 0.1;
for i = 1:20
detections{i}.Time = detections{i}.Time + dT;
detections{i}.Measurement = detections{i}.Measurement + [1;2;0]*dT;
end
[confTracks,tentTracks,allTracks] = tracker(detections,dT);Визуализируйте обнаружения и подтвержденные дорожки.
% Obtain measurements from detections. d = [detections{:}]; measurements = [d.Measurement]; % Extract positions of confirmed tracking using getTrackPositions function. % Note that we used the default sensor configuration % FilterInitializationFcn, initcvggiwphd, which uses a constant velocity % model and defines the states as [x;vx;y;vy;z;vy]. positionSelector = [1 0 0 0 0 0;0 0 1 0 0 0;0 0 0 0 1 0]; positions = getTrackPositions(confTracks,positionSelector); figure() plot(measurements(1,:),measurements(2,:),'x','MarkerSize',5,'MarkerEdgeColor','b'); hold on; plot(positions(1,1),positions(1,2),'v','MarkerSize',5,'MarkerEdgeColor','r' ); hold on; plot(positions(2,1),positions(2,2),'^','MarkerSize',5,'MarkerEdgeColor','r' ); legend('Detections','Track 1','Track 2') xlabel('x') ylabel('y')
![]()
Плотность гипотезы вероятности (PHD) является функцией, определяемой по пространству состояний системы слежения, и ее значение в состоянии задано как ожидаемое количество целей на модульный объем пространства состояний. PHD обычно аппроксимируется смесью компонентов, и каждый компонент соответствует оценке состояния. Обычно используемые приближения PHD являются Гауссовой смесью, смесью SMC, смесью GGIW и смесью GIW.
Чтобы изучить PHD, возьмите Гауссову смесь в качестве примера. Гауссова смесь может быть представлена
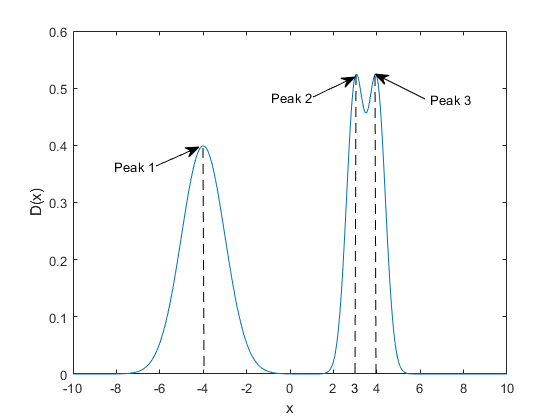
где M является общим количеством компонентов, N (x |mi, P i) является нормальным распределением со средним m i и ковариация P i, и w, i - вес i th компонент. w веса i обозначает номер, который может быть дробным целей, представленных i th компонент. Интегрирование D (x) по области пространства состояний приводит к ожидаемому количеству целей в той области. При интеграции D (x) по целым результатам пространства состояний в общем ожидаемом количестве целей (∑ w i), поскольку интегрирование нормального распределения по целому пространству состояний равняется 1. x - координаты peaks (локальные максимумы) D (x) представляют наиболее вероятные состояния целей.
Например, следующая фигура иллюстрирует функцию PHD, данную D (x) = N (x |−4,2) + 0.5N (x |3 0.4) + 0.5N (x |4 0.4). Суммирование веса этих компонентов равняется 2, что означает, что, вероятно, существуют две цели. От peaks D (x) возможные положения этих целей в x = −4, x = 3, и x = 4. Заметьте, что последние два компонента очень друг близко к другу, что означает, что эти два компонента могут возможно быть приписаны одному объекту.
[1] Granstorm, K., К. Ландкуист и О. Оргунер. "Расширенное целевое отслеживание с помощью фильтра Gaussian-mixture PHD". Транзакции IEEE на Космических и Электронных системах. Издание 48, Номер 4, 2012, стр 3268-3286.
[2] Granstorm, K. и О. Оргунер". Фильтр PHD для отслеживания нескольких расширенных целей с помощью случайных матриц". Транзакции IEEE на Обработке сигналов. Издание 60, Номер 11, 2012, стр 5657-5671.
[3] Granstorm, K., и А. Натале, П. Брэка, Г. Лудено и Ф. Серафино. "Гамма Гауссова инверсия плотность гипотезы вероятности Уишарта для расширенной целевой X-полосы использования отслеживания морские радарные данные". Транзакции IEEE на Геонауке и Дистанционном зондировании. Издание 53, Номер 12, 2015, стр 6617-6631.
