MeasurementParameters свойство состоит из массива структур, которые описывают последовательность координатных преобразований от дочерней системы координат до родительской системы координат или обратных преобразований (см. Вращение Системы координат). Если MeasurementParameters только содержит одну структуру, затем она представляет вращение от одной системы координат до другого. Если MeasurementParameters содержит массив структур, затем он представляет вращения между несколькими системами координат.
Поля MeasurementParameters показаны здесь. Не все поля должны присутствовать в структуре.
| Поле | Описание |
Frame | Перечислимый тип, указывающий на систему координат раньше, сообщал об измерениях. Когда об обнаружениях сообщают с помощью системы прямоугольной координаты, Frame установлен в 'rectangular'. Когда об обнаружениях сообщают в сферических координатах, Frame установлен в 'spherical' для первого struct. |
OriginPosition | Смещение положения источника дочерней системы координат относительно родительской системы координат, представленной как вектор 3 на 1. |
OriginVelocity | Скоростное смещение источника дочерней системы координат относительно родительской системы координат, представленной как вектор 3 на 1. |
Orientation | 3х3 ортонормированная матрица вращения системы координат с действительным знаком. Направление вращения зависит от IsParentTochild поле . |
IsParentToChild | Логический скаляр, указывающий, если Orientation выполняет вращение системы координат от системы координат координаты вышестоящего элемента до системы координат координаты нижестоящего элемента. Если false, Orientation выполняет вращение системы координат от системы координат координаты нижестоящего элемента до системы координат координаты вышестоящего элемента. |
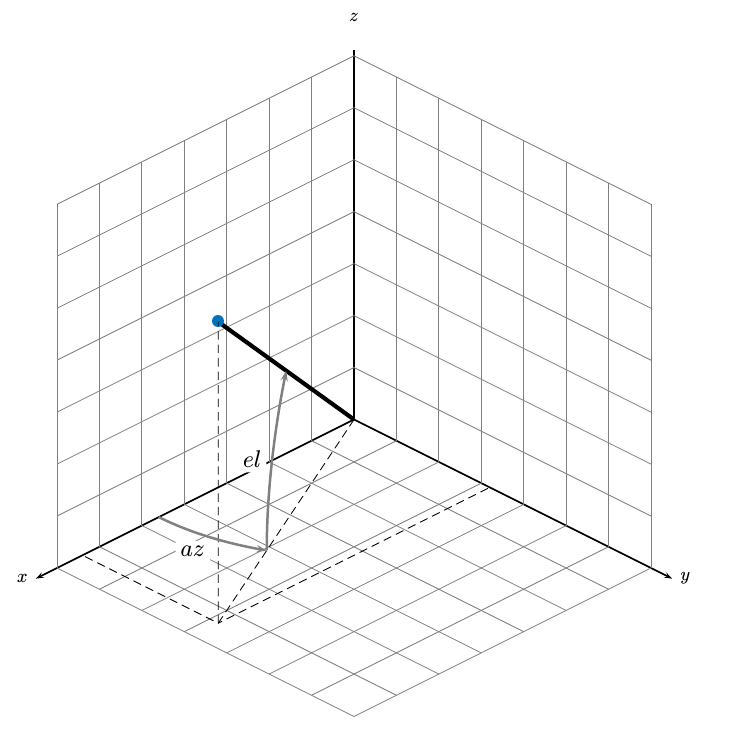
HasElevation | Логический скаляр, указывающий, включено ли вертикальное изменение в измерение. Для измерений, о которых сообщают в прямоугольной системе координат, и если HasElevation false, об измерениях сообщают, принимая 0 градусов вертикального изменения. |
HasAzimuth | Логический скаляр, указывающий, включен ли азимут в измерение. |
HasRange | Логический скаляр, указывающий, включена ли область значений в измерение. |
HasVelocity | Логический скаляр, указывающий, включают ли обнаружения, о которых сообщают, скоростные измерения. Для измерений, о которых сообщают в прямоугольной системе координат, если HasVelocity false, об измерениях сообщают как [x y z]. Если HasVelocity true, об измерениях сообщают как [x y z vx vy vz]. |