Постройте набор платформ в плоттере платформы
plotPlatform( задает положения платформ M, положения которых построены по platPlotter,positions)platPlotter. Задайте позиции M-by-3 матрица, где каждый столбец матрицы соответствует x - y - и z - координаты местоположений платформы.
plotPlatform( также задает соответствующие скорости платформ. Скорости построены как векторы линии, происходящие от положений платформ. Если задано, скорости должны иметь те же размерности как положения.platPlotter,positions,velocities)
plotPlatform( также задает вектор ячейки из длины M, элементы которого содержат текстовые метки, соответствующие платформам M, заданным в матрице положений. Если не использовано, никакие метки не построены.platPlotter,positions,labels)
plotPlatform( задает скорости и текстовые метки, соответствующие платформам M, заданным в матрице положений.platPlotter,positions,velocities,labels)
plotPlatform( задает размерность и ориентацию каждой нанесенной на график платформы.platPlotter,positions,___,dimensions,orientations)
plotPlatform( задает степень каждой платформы с помощью сеток.platPlotter,positions,___,meshes,orientations)
Создайте театральный график.
tp = theaterPlot('XLim',[0,90],'YLim',[-35,35],'ZLim',[1,10]);
Создайте плоттер платформы с именем 'Platforms'.
plotter = platformPlotter(tp,'DisplayName','Platforms');
Обновите театральный график с тремя помеченными платформами, 'R1'r2 , и 'R3'. Расположите эти три платформы, в модулях метров, в , , и , с соответствующими скоростями (в m/s) , , и , соответственно.
positions = [30, 5, 4; 30, -10, 2; 30, 15, 1];
velocities = [-10, 0, 2; -10, 3, 1; -10, -4, 1];
labels = {'R1','R2','R3'};
plotPlatform(plotter, positions, velocities, labels);
platPlotter — Плоттер платформыplatformPlotter объектПлоттер платформы в виде a platformPlotter объект.
positions — Положения платформыПоложения платформы в виде M-by-3 матрица с действительным знаком, где M является количеством платформ. Каждый столбец матрицы соответствует x - y - и z - координаты местоположений платформы в метрах.
velocities — Скорости платформыСкорости платформы в виде M-by-3 матрица с действительным знаком, где M является количеством платформ. Каждый столбец матрицы соответствует x, y и скоростям z платформ. Если задано, velocities должен иметь те же размерности как positions.
labels — Метки платформыПлатформа помечает в виде M-by-1 массив ячеек из символьных векторов, где M является количеством платформ. labels содержит текстовые метки, соответствующие платформам M, заданным в positions. Если labels не использован, никакие метки не построены.
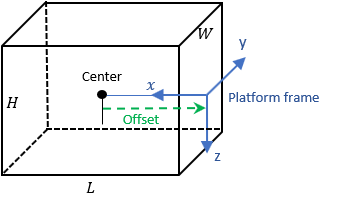
dimensions — Размерности платформыРазмерности платформы в виде M-by-1 массив структур размерности, где M является количеством платформ. Поля каждой структуры размерности:
Поля Dimensions
| Поля | Описание |
|---|---|
Length | Размерность кубоида вдоль направления x |
Width | Размерность кубоида вдоль направления y |
Height | Размерность кубоида вдоль направления z |
OriginOffset | Положение платформы координирует систему координат относительно центра кубоида в виде вектора из трех элементов |
meshes — Сетки платформыextendedObjectMesh объектПлатформа сцепляется в виде M - массив элемента extendedObjectMesh объекты.
orientations — Ориентации платформыquaternion объектОриентации платформы в виде 3-by-3-by-M массив матриц вращения или M - массив элемента quaternion объекты.
