Выполнимые объединенные события для trackerJPDA
FJE = jpdaEvents(validationMatrix)FJE, на основе матрицы валидации. Матрица валидации описывает возможные ассоциации между обнаружениями и дорожками, тогда как выполнимое объединенное событие для мультиобъектного отслеживания является одной реализацией ассоциаций между обнаружениями и дорожками.
[ генерирует FJE,FJEProbs] = jpdaEvents(likelihoodMatrix,k)k- лучше всего выполнимые объединенные матрицы события, FJE, соответствуя следующей матрице вероятности, likelihoodMatrix. likelihoodMatrix задает следующую вероятность соединения обнаружений с дорожками.
В типичном рабочем процессе для системы слежения средство отслеживания должно определить, может ли обнаружение быть сопоставлено с какой-либо из существующих дорожек. Если средство отслеживания только обеспечивает одну дорожку, присвоение может быть сделано путем оценки логического элемента валидации вокруг предсказанного измерения и решения, находится ли измерение в пределах логического элемента валидации. На пробеле измерения логический элемент валидации является пространственным контуром, таким как 2D эллипс или 3-D эллипсоид, сосредоточенный при предсказанном измерении. Логический элемент валидации задан с помощью информации о вероятности (оценка состояния и ковариация, например) существующей дорожки, такой, что правильные или идеальные обнаружения имеют высокую вероятность (97%-я вероятность, например) нахожения в пределах этого логического элемента валидации.
Однако, если средство отслеживания обеспечивает несколько дорожек, процесс ассоциации данных становится более сложным, потому что одно обнаружение может находиться в пределах логических элементов валидации нескольких дорожек. Например, в следующем рисунке, T дорожек 1 и T 2 активно обеспечен в средстве отслеживания, и у каждого из них есть свой собственный логический элемент валидации. Начиная с обнаружения D 2 находится в пересечении логических элементов валидации и T 1 и T 2, две дорожки (T 1 и T 2) соединяются и формируют кластер. Кластер является набором связанных дорожек и их связанных обнаружений.
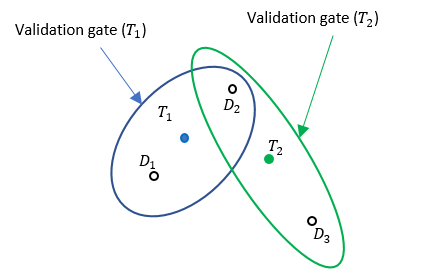
Чтобы представлять отношение ассоциации в кластере, матрица валидации обычно используется. Каждая строка матрицы валидации соответствует обнаружению, в то время как каждый столбец соответствует дорожке. С учетом возможности каждого обнаружения, являющегося помехой, первый столбец добавляется и обычно называемый "Дорожкой 0" или T 0. Если обнаружение D, i - в логическом элементе валидации дорожки D j, то (j, i +1) запись матрицы валидации равняется 1. В противном случае это - нуль. Для показанного на рисунке кластера матрица валидации Ω
Обратите внимание на то, что все элементы в первом столбце Ω равняются 1, потому что любое обнаружение может быть помехой или ложным предупреждением. Один важный шаг в логике объединенной вероятностной ассоциации данных (JPDA) должен получить все выполнимые независимые объединенные события в кластере. Два предположения для выполнимых объединенных событий:
Обнаружение не может быть испущено больше чем одной дорожкой.
Дорожка не может быть обнаружена несколько раз датчиком во время одного скана.
На основе этих двух предположений могут быть сформулированы выполнимые объединенные события (FJEs). Каждый FJE сопоставлен с матрицей FJE Ωp из начальной матрицы валидации Ω. Например, с матрицей валидации Ω, восемь матриц FJE могут быть получены:
Как прямое следствие этих двух предположений, Ωp матрицы имеют точно одно "1" значение на строку. Кроме того, за исключением первого столбца, который сопоставляет с помехой, может быть самое большее один "1" для каждого столбца. Когда количество связанных дорожек растет в кластере, количестве увеличений FJE быстро. jpdaEvents функционируйте использует эффективный алгоритм поиска в глубину, чтобы сгенерировать все выполнимые объединенные матрицы события.
[1] Чжоу, Интервал и Н. К. Боз. "Мультицелевое отслеживание в помехе: Алгоритмы FAST для ассоциации данных". Транзакции IEEE на космических и электронных системах 29, № 2 (1993): 352-363.
[2] Фишер, Джеймс Л. и Давид П. Казазан. "Быстрая мультицель JPDA отслеживание алгоритма". Прикладная оптика 28, № 2 (1989): 371-376.
