Соедините вероятностное средство отслеживания ассоциации данных
trackerJPDA Система object™ является средством отслеживания, способным к обработке обнаружений нескольких целей от нескольких датчиков. Использование средства отслеживания соединяет вероятностную ассоциацию данных, чтобы присвоить обнаружения каждой дорожке. Средство отслеживания применяет мягкое присвоение, где несколько обнаружений могут способствовать каждой дорожке. Средство отслеживания инициализирует, подтверждает, корректирует, предсказывает (выполняет каботажное судоходство), и удаляет дорожки. Входные параметры к средству отслеживания являются отчетами обнаружения, сгенерированными objectDetection, fusionRadarSensor, irSensor, или sonarSensor объекты. Средство отслеживания оценивает вектор состояния и оценочную ошибочную ковариационную матрицу состояния для каждой дорожки. Каждое обнаружение присвоено по крайней мере одной дорожке. Если обнаружение не может быть присвоено никакой существующей дорожке, средство отслеживания создает новый трек.
Любой новый трек запускается в предварительном состоянии. Если достаточно обнаружений присвоено предварительной дорожке, ее изменениям состояния в подтвержденном (см. ConfirmationThreshold свойство. Если обнаружение уже имеет известную классификацию (т.е. ObjectClassID поле возвращенной дорожки является ненулевым), что соответствующая дорожка сразу подтверждена. Когда дорожка подтверждена, средство отслеживания полагает, что дорожка представляет физический объект. Если обнаружения не присвоены дорожке в specifiable количестве обновлений, дорожка удалена.
Можно включить различные режимы отслеживания JPDA путем определения свойств TrackLogic и MaxNumEvents.
Установка свойства TrackLogic к 'Integrated' включить соединение интегрировало ассоциацию данных (JIPDA) средство отслеживания, в котором подтверждение дорожки и удаление основаны на вероятности существования дорожки.
Установка свойства MaxNumEvents до конечного целого числа включить k-best соединяет интегрированную ассоциацию данных (k-best JPDA) средство отслеживания, которое генерирует максимум k событий на кластер.
Отслеживать цели с помощью этого объекта:
Создайте trackerJPDA объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?
tracker = trackerJPDAtrackerJPDA Системный объект со значениями свойств по умолчанию.
tracker = trackerJPDA(Name,Value)trackerJPDA('FilterInitializationFcn',@initcvukf,'MaxNumTracks',100) создает мультиобъектное средство отслеживания, которое использует постоянную скорость, сигма-точечный фильтр Калмана и позволяет максимум 100 дорожек. Заключите каждое имя свойства в кавычки.
Чтобы обработать обнаружения и дорожки обновления, вызовите средство отслеживания с аргументами, как будто это была функция (описанный здесь).
confirmedTracks = tracker(detections,time)time.
confirmedTracks = tracker(detections,time,costMatrix)
Чтобы включить этот синтаксис, установите HasCostMatrixInput свойство к true.
confirmedTracks = tracker(___,detectableTrackIDs)detectableTrackIDs. Этот аргумент может использоваться с любым из предыдущих входных синтаксисов.
Чтобы включить этот синтаксис, установите HasDetectableTrackIDsInput свойство к true.
[ также возвращает список предварительных дорожек и список всех дорожек. Можно комбинировать с любым синтаксом из перечисленных выше.confirmedTracks,tentativeTracks,allTracks] = tracker(___)
[ также возвращает информацию об анализе, которая может использоваться для анализа дорожки. Можно комбинировать с любым синтаксом из перечисленных выше.confirmedTracks,tentativeTracks,allTracks,analysisInformation] = tracker(___)
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Создайте объект trackerJPDA с постоянной скоростью по умолчанию, Расширенный Фильтр Калмана и 'История' отслеживают логику. Установите AssignmentThreshold на 100 позволять дорожкам быть совместно сопоставленными.
tracker = trackerJPDA('TrackLogic','History', 'AssignmentThreshold',100,... 'ConfirmationThreshold', [4 5], ... 'DeletionThreshold', [10 10]);
Задайте истинные исходные положения и скорости двух объектов.
pos_true = [0 0 ; 40 -40 ; 0 0]; V_true = 5*[cosd(-30) cosd(30) ; sind(-30) sind(30) ;0 0];
Создайте театральный график визуализировать дорожки и обнаружения.
tp = theaterPlot('XLimits',[-1 150],'YLimits',[-50 50]); trackP = trackPlotter(tp,'DisplayName','Tracks','MarkerFaceColor','g','HistoryDepth',0); detectionP = detectionPlotter(tp,'DisplayName','Detections','MarkerFaceColor','r');
![]()
Чтобы получить положение и скорость, создайте селекторы положения и скорости.
positionSelector = [1 0 0 0 0 0; 0 0 1 0 0 0; 0 0 0 0 0 0]; % [x, y, 0] velocitySelector = [0 1 0 0 0 0; 0 0 0 1 0 0; 0 0 0 0 0 0 ]; % [vx, vy, 0]
Обновите средство отслеживания с обнаружениями, стоимостью отображения и безусловной вероятностью информации об ассоциации, и визуализируйте дорожки с обнаружениями.
dt = 0.2; for time = 0:dt:30 % Update the true positions of objects. pos_true = pos_true + V_true*dt; % Create detections of the two objects with noise. detection(1) = objectDetection(time,pos_true(:,1)+1*randn(3,1)); detection(2) = objectDetection(time,pos_true(:,2)+1*randn(3,1)); % Step the tracker through time with the detections. [confirmed,tentative,alltracks,info] = tracker(detection,time); % Extract position, velocity and label info. [pos,cov] = getTrackPositions(confirmed,positionSelector); vel = getTrackVelocities(confirmed,velocitySelector); meas = cat(2,detection.Measurement); measCov = cat(3,detection.MeasurementNoise); % Update the plot if there are any tracks. if numel(confirmed)>0 labels = arrayfun(@(x)num2str([x.TrackID]),confirmed,'UniformOutput',false); trackP.plotTrack(pos,vel,cov,labels); end detectionP.plotDetection(meas',measCov); drawnow; % Display the cost and marginal probability of distribution every eight % seconds. if time>0 && mod(time,8) == 0 disp(['At time t = ' num2str(time) ' seconds,']); disp('The cost of assignment was: ') disp(info.CostMatrix); disp(['Number of clusters: ' num2str(numel(info.Clusters))]); if numel(info.Clusters) == 1 disp('The two tracks were in the same cluster.') disp('Marginal probabilities of association:') disp(info.Clusters{1}.MarginalProbabilities) end disp('-----------------------------') end end
At time t = 8 seconds,
The cost of assignment was:
1.0e+03 *
0.0020 1.1523
1.2277 0.0053
Number of clusters: 2
-----------------------------
At time t = 16 seconds,
The cost of assignment was:
1.3968 4.5123
2.0747 1.9558
Number of clusters: 1
The two tracks were in the same cluster.
Marginal probabilities of association:
0.8344 0.1656
0.1656 0.8344
0.0000 0.0000
-----------------------------
At time t = 24 seconds,
The cost of assignment was:
1.0e+03 *
0.0018 1.2962
1.2664 0.0013
Number of clusters: 2
-----------------------------
![]()
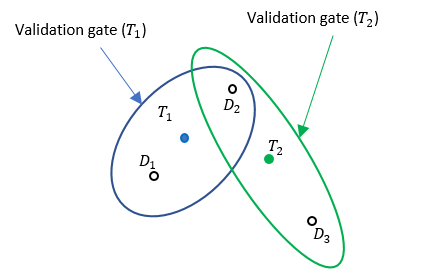
В типичном рабочем процессе для системы слежения средство отслеживания должно определить, может ли обнаружение быть сопоставлено с какой-либо из существующих дорожек. Если средство отслеживания только обеспечивает одну дорожку, присвоение может быть сделано путем оценки логического элемента валидации вокруг предсказанного измерения и решения, находится ли измерение в пределах логического элемента валидации. На пробеле измерения логический элемент валидации является пространственным контуром, таким как 2D эллипс или 3-D эллипсоид, сосредоточенный при предсказанном измерении. Логический элемент валидации задан с помощью информации о вероятности (оценка состояния и ковариация, например) существующей дорожки, такой, что правильные или идеальные обнаружения имеют высокую вероятность (97%-я вероятность, например) нахожения в пределах этого логического элемента валидации.
Однако, если средство отслеживания обеспечивает несколько дорожек, процесс ассоциации данных становится более сложным, потому что одно обнаружение может находиться в пределах логических элементов валидации нескольких дорожек. Например, в следующем рисунке, T дорожек 1 и T 2 активно обеспечен в средстве отслеживания, и у каждого из них есть свой собственный логический элемент валидации. Начиная с обнаружения D 2 находится в пересечении логических элементов валидации и T 1 и T 2, две дорожки (T 1 и T 2) соединяются и формируют кластер. Кластер является набором связанных дорожек и их связанных обнаружений.
Чтобы представлять отношение ассоциации в кластере, матрица валидации обычно используется. Каждая строка матрицы валидации соответствует обнаружению, в то время как каждый столбец соответствует дорожке. С учетом возможности каждого обнаружения, являющегося помехой, первый столбец добавляется и обычно называемый "Дорожкой 0" или T 0. Если обнаружение D, i - в логическом элементе валидации дорожки D j, то (j, i +1) запись матрицы валидации равняется 1. В противном случае это - нуль. Для показанного на рисунке кластера матрица валидации Ω
Обратите внимание на то, что все элементы в первом столбце Ω равняются 1, потому что любое обнаружение может быть помехой или ложным предупреждением. Один важный шаг в логике объединенной вероятностной ассоциации данных (JPDA) должен получить все выполнимые независимые объединенные события в кластере. Два предположения для выполнимых объединенных событий:
Обнаружение не может быть испущено больше чем одной дорожкой.
Дорожка не может быть обнаружена несколько раз датчиком во время одного скана.
На основе этих двух предположений могут быть сформулированы выполнимые объединенные события (FJEs). Каждый FJE сопоставлен с матрицей FJE Ωp из начальной матрицы валидации Ω. Например, с матрицей валидации Ω, восемь матриц FJE могут быть получены:
Как прямое следствие этих двух предположений, Ωp матрицы имеют точно одно "1" значение на строку. Кроме того, за исключением первого столбца, который сопоставляет с помехой, может быть самое большее один "1" для каждого столбца. Когда количество связанных дорожек растет в кластере, количестве увеличений FJE быстро. jpdaEvents функционируйте использует эффективный алгоритм поиска в глубину, чтобы сгенерировать все выполнимые объединенные матрицы события.
[1] Фортманн, T. Y. Панель шалом и М. Шефф. "Отслеживание гидролокатора Нескольких Целей Используя Объединенную Вероятностную Ассоциацию Данных". Журнал IEEE Океанской Разработки. Издание 8, Номер 3, 1983, стр 173-184.
[2] Musicki, D. и Р. Эванс. "Объединенная Интегрированная Вероятностная Ассоциация Данных: JIPDA". Транзакции IEEE на Космических и Электронных системах. Издание 40, Номер 3, 2004, стр 1093-1099.
