Время нарастания, время урегулирования и другие характеристики переходного процесса
stepinfo позволяет вам вычислить характеристики переходного процесса для модели динамической системы или для массива данных переходного процесса. Для переходного процесса y (t), stepinfo вычисляет характеристики относительно yinit и yfinal, где yinit является начальным смещением, то есть, значение, прежде чем шаг будет применен, и yfinal является установившимся значением ответа. Эти значения зависят от синтаксиса, который вы используете.
Для модели sys динамической системы, stepinfo использование yinit = 0 и yfinal = установившееся значение.
Для массива данных переходного процесса [y,t], stepinfo использование yinit = 0 и yfinal = длится демонстрационное значение y, если вы явным образом не задаете эти значения.
Для получения дополнительной информации о как stepinfo вычисляет характеристики переходного процесса, см. Алгоритмы.
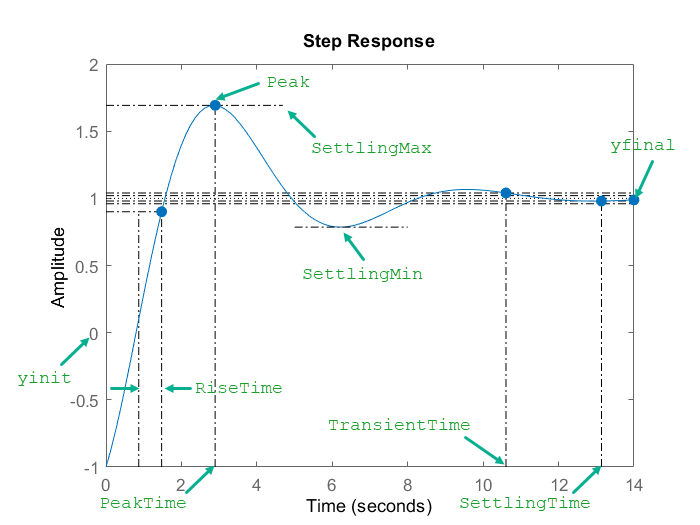
Следующая фигура иллюстрирует некоторые характеристики stepinfo вычисляет для переходного процесса. Для этого ответа примите что y (t) = 0 для t <0, таким образом, yinit = 0.
S = stepinfo(sys)sys динамической системы. Этот синтаксис использует yinit = 0 и yfinal = установившееся значение для вычисления характеристик, которые зависят от этих значений.
Используя этот синтаксис требует лицензии Control System Toolbox™.
S = stepinfo(y,t)y и соответствующий временной вектор t. Для откликов системы SISO, y вектор с тем же количеством записей как t. Для данных об ответе MIMO, y массив, содержащий ответы каждого канала ввода-вывода. Этот синтаксис использует yinit = 0 и последнее значение в y (или последнее значение в соответствующих данных об ответе каждого канала) как yfinal.
S = stepinfo(y,t,yfinal)yfinal. Этот синтаксис полезен, когда вы знаете, что ожидаемый установившийся отклик системы отличается от последнего значения в y по причинам, таким как шум измерения. Этот синтаксис использует yinit = 0.
Для ответов SISO, t и y векторы с той же длиной NS. Для систем с NU входные параметры и NY выходные параметры, можно задать y как NS- NY- NU массив (см. step) и yfinal как NY- NU массив. stepinfo затем возвращает NY- NU массивы структур из характеристик ответа, соответствующих каждой паре ввода-вывода.
S = stepinfo(y,t,yfinal,yinit)yinit. Этот синтаксис полезен когда ваш y данные имеют начальное смещение; то есть, y является ненулевым, прежде чем шаг произойдет.
Для ответов SISO, t и y векторы с той же длиной NS. Для систем с NU входные параметры и NY выходные параметры, можно задать y как NS- NY- NU массив и yinit как NY- NU массив. stepinfo затем возвращает NY- NU массивы структур из характеристик ответа, соответствующих каждой паре ввода-вывода.
S = stepinfo(___,'RiseTimeLimits',RT)RT = [0.1 0.9]). Верхний порог RT(2) также используется, чтобы вычислить SettlingMin и SettlingMax. Эти значения являются минимальными и максимальными значениями ответа, происходящего после того, как ответ достигнет верхнего порога. Можно использовать этот синтаксис с любой из предыдущих комбинаций входных аргументов.
Вычислите характеристики переходного процесса, такие как время нарастания, время урегулирования и перерегулирование, для модели динамической системы. В данном примере используйте передаточную функцию непрерывного времени:
Создайте передаточную функцию и исследуйте ее переходной процесс.
sys = tf([1 5 5],[1 1.65 5 6.5 2]); step(sys)

График показывает, что повышения ответа за несколько секунд, и затем звонят вниз к установившемуся значению приблизительно 2,5. Вычислите характеристики этого ответа с помощью stepinfo.
S = stepinfo(sys)
S = struct with fields:
RiseTime: 3.8456
TransientTime: 27.9762
SettlingTime: 27.9762
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
Здесь, функциональное использование = 0, чтобы вычислить характеристики для модели sys динамической системы.
По умолчанию время урегулирования является временем, которое требуется для ошибки остаться ниже 2% . Результат S.SettlingTime показывает это для sys, это условие происходит приблизительно после 28 секунд. Определением по умолчанию времени нарастания является время, которое требуется для ответа, чтобы пойти от 10% до 90% пути от = 0 к . S.RiseTime показывает это для sys, это повышение происходит меньше чем за 4 секунды. Максимальное перерегулирование возвращено в S.Overshoot. Для этой системы, пиковое значение S.Peak, который происходит в то время S.PeakTime, перерегулирования приблизительно 7,5% установившегося значения.
Для системы MIMO, stepinfo возвращает массив структур, в котором каждая запись содержит характеристики ответа соответствующего канала ввода-вывода системы. В данном примере используйте 2D выход, 2D входную систему дискретного времени. Вычислите характеристики переходного процесса.
A = [0.68 -0.34; 0.34 0.68]; B = [0.18 -0.05; 0.04 0.11]; C = [0 -1.53; -1.12 -1.10]; D = [0 0; 0.06 -0.37]; sys = ss(A,B,C,D,0.2); S = stepinfo(sys)
S=2×2 struct array with fields:
RiseTime
TransientTime
SettlingTime
SettlingMin
SettlingMax
Overshoot
Undershoot
Peak
PeakTime
Доступ к характеристикам ответа для конкретного I/0 образовывает канал путем индексации в S. Например, исследуйте характеристики ответа на ответ от первого входа до второго выхода sys, соответствие S(2,1).
S(2,1)
ans = struct with fields:
RiseTime: 0.4000
TransientTime: 2.8000
SettlingTime: 3
SettlingMin: -0.6724
SettlingMax: -0.5188
Overshoot: 24.6476
Undershoot: 11.1224
Peak: 0.6724
PeakTime: 1
Чтобы получить доступ к особому значению, используйте запись через точку. Например, извлеките время нарастания эти (2,1) канал.
rt21 = S(2,1).RiseTime
rt21 = 0.4000
Можно использовать SettlingTimeThreshold и RiseTimeThreshold изменить процент по умолчанию для урегулирования и времен нарастания, соответственно, как описано в разделе Algorithms. В данном примере используйте систему, данную:
Создайте передаточную функцию.
sys = tf([1 5 5],[1 1.65 5 6.5 2]);
Вычислите время, которое требуется для ошибки в ответе sys остаться ниже 0,5% разрыва . Для этого установите SettlingTimeThreshold к 0,5%, или 0.005.
S1 = stepinfo(sys,'SettlingTimeThreshold',0.005);
st1 = S1.SettlingTimest1 = 46.1325
Вычислите время, оно берет ответ sys повыситься с 5% до 95% пути от к . Для этого установите RiseTimeThreshold к вектору, содержащему те границы.
S2 = stepinfo(sys,'RiseTimeThreshold',[0.05 0.95]);
rt2 = S2.RiseTimert2 = 4.1690
Можно задать проценты и для времени урегулирования и для времени нарастания в том же расчете.
S3 = stepinfo(sys,'SettlingTimeThreshold',0.005,'RiseTimeThreshold',[0.05 0.95])
S3 = struct with fields:
RiseTime: 4.1690
TransientTime: 46.1325
SettlingTime: 46.1325
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
Можно извлечь характеристики переходного процесса из данных переходного процесса, даже если у вас нет модели вашей системы. Например, предположите, что вы измерили ответ своей системы к входу шага и сохранили получившиеся данные об ответе в векторном y из значений отклика во времена, сохраненные в другом векторном t. Загрузите данные об ответе и исследуйте их.
load StepInfoData t y plot(t,y)

Вычислите характеристики переходного процесса из этих данных об ответе с помощью stepinfo. Если вы не задаете установившееся значение отклика yfinal, затем stepinfo принимает что последнее значение в векторе отклика y установившийся response.Поскольку данные имеют некоторый шум, последнее значение в y вероятно не истинное установившееся значение отклика. Когда вы знаете, каково установившееся значение должно быть, можно предоставить его stepinfo. В данном примере предположите, что установившийся ответ 2.4.
S1 = stepinfo(y,t,2.4)
S1 = struct with fields:
RiseTime: 1.2897
TransientTime: 19.6478
SettlingTime: 19.6439
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
Из-за шума в данных определение по умолчанию времени урегулирования является слишком строгим, приводя к произвольному значению почти 20 секунд. Чтобы допускать шум, увеличьте порог времени урегулирования со значения по умолчанию 2% к 5%.
S2 = stepinfo(y,t,2.4,'SettlingTimeThreshold',0.05)S2 = struct with fields:
RiseTime: 1.2897
TransientTime: 10.4201
SettlingTime: 10.4149
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
Время урегулирования и переходное время равно когда пиковая ошибка равно разрыву (см. Алгоритмы (Control System Toolbox)), который имеет место для моделей без отклонения от номинала или сквозного соединения и меньше чем с 100%-м перерегулированием. Они имеют тенденцию не соглашаться для моделей со сквозным соединением, нулями в начале координат, нестабильные нули (отклонение от номинала) или большое перерегулирование.
Рассмотрите следующие модели.
s = tf('s'); sys1 = 1+tf(1,[1 1]); % feedthrough sys2 = tf([1 0],[1 1]); % zero at the origin sys3 = tf([-3 1],[1 2 1]); % non-minimum phase with undershoot sys4 = (s/0.5 + 1)/(s^2 + 0.2*s + 1); % large overshoot step(sys1,sys2,sys3,sys4) grid on legend('Feedthrough','Zero at origin','Non-minimum phase with undershoot','Large overshoot')

Вычислите характеристики переходного процесса.
S1 = stepinfo(sys1)
S1 = struct with fields:
RiseTime: 1.6095
TransientTime: 3.9121
SettlingTime: 3.2190
SettlingMin: 1.8005
SettlingMax: 2.0000
Overshoot: 0
Undershoot: 0
Peak: 2.0000
PeakTime: 10.5458
S2 = stepinfo(sys2)
S2 = struct with fields:
RiseTime: 0
TransientTime: 3.9121
SettlingTime: NaN
SettlingMin: 2.6303e-05
SettlingMax: 1
Overshoot: Inf
Undershoot: 0
Peak: 1
PeakTime: 0
S3 = stepinfo(sys3)
S3 = struct with fields:
RiseTime: 2.9198
TransientTime: 6.5839
SettlingTime: 7.3229
SettlingMin: 0.9004
SettlingMax: 0.9991
Overshoot: 0
Undershoot: 88.9466
Peak: 0.9991
PeakTime: 10.7900
S4 = stepinfo(sys4)
S4 = struct with fields:
RiseTime: 0.3896
TransientTime: 40.3317
SettlingTime: 46.5052
SettlingMin: -0.2796
SettlingMax: 2.7571
Overshoot: 175.7137
Undershoot: 27.9629
Peak: 2.7571
PeakTime: 1.8850
Исследуйте графики и характеристики. Для этих моделей отличается время урегулирования и переходное время, потому что пиковая ошибка превышает разрыв между начальной буквой и окончательным значением. Для моделей, таких как sys2, время урегулирования возвращено как NaN потому что установившееся значение является нулем.
В этом примере вы вычисляете характеристики переходного процесса из данных переходного процесса, которые имеют начальное смещение. Это означает, что значение данных об ответе является ненулевым, прежде чем шаг произойдет.
Загрузите данные переходного процесса и исследуйте график.
load stepDataOffset.mat
plot(stepOffset.Time,stepOffset.Data)
Если вы не задаете yfinal и yinit, затем stepinfo принимает тот yfinal последнее значение в векторе отклика y и yinit zero. Когда вы знаете, каковы установившиеся и начальные значения, можно предоставить их stepinfo. Здесь, устойчивое состояние ответа yfinal 0.9, и начальная буква возместила yinit 0.2.
Вычислите характеристики переходного процесса из этих данных об ответе.
S = stepinfo(stepOffset.Data,stepOffset.Time,0.9,0.2)
S = struct with fields:
RiseTime: 0.0084
TransientTime: 1.0662
SettlingTime: 1.0662
SettlingMin: 0.8461
SettlingMax: 1.0878
Overshoot: 26.8259
Undershoot: 0.0429
Peak: 0.8878
PeakTime: 1.0225
Здесь, пиковое значение этого ответа 0.8878 потому что stepinfo измеряет максимальное отклонение от yinit.
sys — Динамическая системаДинамическая система в виде SISO или модели динамической системы MIMO. Динамические системы, которые можно использовать, включают:
Непрерывное время или дискретное время числовые модели LTI, такой как tf (Control System Toolbox), zpk (Control System Toolbox), или ss Модели (Control System Toolbox).
Обобщенные или неопределенные модели LTI такой как genss (Control System Toolbox) или uss Модели (Robust Control Toolbox). (Используя неопределенные модели требует программного обеспечения Robust Control Toolbox™.) Для обобщенных моделей, stepinfo вычисляет характеристики переходного процесса с помощью текущего значения настраиваемых блоков и номинальной стоимости неопределенных блоков.
Идентифицированные модели LTI, такой как idtf, idss, или idproc модели.
y — Данные переходного процессаДанные переходного процесса в виде одного из следующего:
Для данных об ответе SISO, вектора из длины Ns, где Ns количество отсчетов в данных об ответе
Для данных об ответе MIMO, Ns- Ny- Nu массив, где Ny количество системы выходные параметры и Nu количество системных входных параметров
t Временной векторВременной вектор, соответствующий данным об ответе в yВ виде вектора из длины Ns.
yfinal — Установившееся значениеУстановившееся значение в виде скаляра или массива.
Для данных об ответе SISO задайте скалярное значение.
Для данных об ответе MIMO задайте Ny- Nu массив, где каждая запись обеспечивает установившееся значение отклика для соответствующего системного канала.
Если вы не обеспечиваете yfinalто stepinfo использует последнее значение в соответствующем канале y как установившееся значение отклика.
Этот аргумент только поддерживается, когда вы обеспечиваете данные переходного процесса как вход. Для модели sys динамической системы как вход, stepinfo yfinal использования = установившееся значение, чтобы вычислить характеристики, которые зависят от этого значения.
yinit — Начальное значениеЗначение y прежде чем шаг происходит в виде скаляра или массива.
Для данных об ответе SISO задайте скалярное значение.
Для данных об ответе MIMO задайте Ny- Nu массив, где каждая запись вводит начальное значение ответа для соответствующего системного канала.
Если вы не обеспечиваете yinitто stepinfo использование обнуляет как начальное значение ответа.
Ответ y (0) в t = 0 равен yinit для систем без сквозного соединения. Однако эти два количества отличаются в присутствии сквозного соединения из-за разрыва в t = 0.
Например, следующий рисунок показывает переходной процесс системы с проходным sys = tf([-1 0.2 1],[1 0.7 1]).
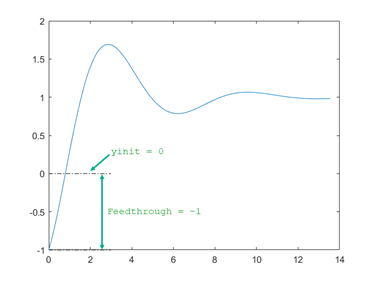
Здесь, yinit является нулем, и проходное значение –1.
Этот аргумент только поддерживается, когда вы обеспечиваете данные переходного процесса как вход. Для модели sys динамической системы как вход, stepinfo yinit использования = 0, чтобы вычислить характеристики, которые зависят от этого значения.
ST — Порог времени урегулированияПорог для определения урегулирования и переходные времена в виде скалярного значения между 0 и 1. Чтобы изменить урегулирование значения по умолчанию и переходные определения времени (см. Алгоритмы), установите ST к различному значению. Например, чтобы измериться, когда ошибка падения ниже 5%, устанавливает ST к 0,05.
RT — Пороги времени нарастанияПорог для определения времени нарастания в виде вектора-строки с 2 элементами из неубывающих значений между 0 и 1. Чтобы изменить определение времени нарастания по умолчанию (см. Алгоритмы), установите RT к различному значению. Например, чтобы задать время нарастания как время это берет для ответа, чтобы повыситься с 5% до 95% от начального значения до установившегося значения, установить RT к [0.05 0.95].
Для переходного процесса y (t), stepinfo вычисляет характеристики относительно yinit и yfinal. Для модели sys динамической системы, stepinfo использование yinit = 0 и yfinal = установившееся значение.
Эта таблица показывает как stepinfo вычисляет каждую характеристику.
| Характеристика переходного процесса | Описание |
|---|---|
RiseTime | Время это берет для ответа, чтобы повыситься с 10% до 90% пути от yinit до yfinal |
TransientTime | В первый раз T, таким образом, что ошибка |y (t) – yfinal | ≤ SettlingTimeThreshold × emax для t ≥ T, где emax, является максимальной погрешностью |y (t) – yfinal | для t ≥ 0. По умолчанию, SettlingTimeThreshold = 0.02 (2% пиковой ошибки). Переходное время измеряется, как быстро переходные движущие силы вымирают. |
SettlingTime | В первый раз T, таким образом, что ошибка |y (t) – yfinal | ≤ SettlingTimeThreshold × |yfinal – yinit | для t ≥ T. По умолчанию, |
SettlingMin | Минимальное значение y (t) однажды ответ повысилось |
SettlingMax | Максимальное значение y (t) однажды ответ повысилось |
Overshoot | Перерегулирование процента. Относительно нормированного ответа ynorm (t) = (y (t) – yinit) / (yfinal – yinit), перерегулирование является большим из нуля и 100 × макс. (ynorm (t) – 1). |
Undershoot | Отклонение от номинала процента. Относительно нормированного ответа ynorm (t) отклонение от номинала является меньшим из нуля и –100 × макс. (ynorm (t) – 1). |
Peak | Пиковое значение |y (t) – yinit | |
PeakTime | Время, в которое происходит пиковое значение |
