Система механической передачи с цепью и двумя звездочками
Simscape / Автомобильная трансмиссия / Couplings & Drives

Блок Chain Drive представляет систему механической передачи цепью и двумя звездочками. Цепь сцепляется со звездочками, передавая вращательное движение между двумя. Механическая передача может произойти наоборот, то есть, от доведенного звездочка драйвера, из-за внешних загрузок. Это условие известно как установку в нужное состояние "обратным путем".
Цепь диска совместима. Это может простираться под силой или ослабить, если свободный. Модель податливости состоит из линейного набора пружинного демпфера в параллельном расположении. Пружина сопротивляется растяжимой деформации в цепи. Демпфер сопротивляется растяжимому движению между цепочечными элементами.
Пружина и силы демпфера действуют непосредственно на звездочки, которые соединяет цепь. Упругая сила присутствует, когда одна цепочечная ветвь является тугой. Сила демпфера присутствует постоянно. Чтобы представлять и сообщить об условии отказа, симуляция останавливает и генерирует ошибку, если сетевая растяжимая сила в цепи превышает заданное максимальное значение силы.
Блок составляет вязкое трение в подшипниках соединения звездочки. Во время движения вязкое трение вызывает потери механической передачи, уменьшая КПД цепного привода. Эти потери соединяют из-за цепочечного затухания. Чтобы устранить потери механической передачи в цепочечном диске, в настройках Dynamic, устанавливают параметры для вязкого трения и затухания цепи, чтобы обнулить.
Растяжимый уровень деформации в цепи является различием между звездочкой тангенциальные скорости, которые являются каждым продукт радиусов тангажа и скорости вращения. Математически,
где:
x является растяжимой деформацией.
ωA, ωB является скоростями вращения звездочки.
RA, RB является радиусами тангажа звездочки.
Рисунок показывает следующие переменные.
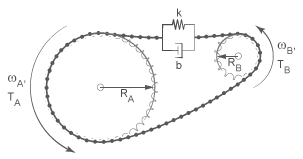
Цепочечная растяжимая сила является сетевой суммой сил демпфера и пружины. Упругая сила является продуктом растяжимой деформации и пружинной постоянной жесткости. Эта сила является нулем, когда растяжимая деформация меньше, чем слабая цепь. Сила демпфера является продуктом растяжимого уровня деформации и коэффициента демпфирования. Математически,
где:
S является слабой цепью.
k является пружинной постоянной жесткостью.
b является коэффициентом демпфера.
Цепь проявляет крутящий момент на каждой звездочке, равной продукту растяжимой силы и радиуса тангажа звездочки. Два крутящих момента действуют в противоположных направлениях согласно этим уравнениям:
Где:
τA является крутящим моментом, что цепь применяет на звездочку A.
τB является крутящим моментом, что цепь применяет на звездочку B.
В терминах скорости и фактора трения, применяются эти уравнения:
Где:
ωA является вращательной скоростью для звездочки A.
ωB является вращательной скоростью для звездочки B.
μA является коэффициентом вязкого трения для звездочки A.
μB является коэффициентом вязкого трения для звездочки B.
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Зубное отношение звездочки равняется отношению радиуса тангажа звездочки.
Цепочечная инерция незначительна.

