Редуктор скорости высокого отношения на основе эластичной деформации эллиптического механизма
Simscape / Автомобильная трансмиссия / Механизмы

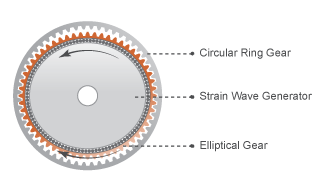
Этот блок представляет компактное, высокое отношение, механизм сокращения скорости, который содержит три ключевых компонента:
Напрягите генератор волны
Эллиптический механизм
Круговой кольцевой механизм
Генератор волны деформации включает эллиптический разъем, соединяемый к мчавшемуся шарикоподшипнику. Это находится в эластичном металлическом механизме, деформируя его в небольшой эллиптический шаблон. Вращение эллиптического шаблона в корпусе механизма составляет волну деформации.
Эллиптически деформированный механизм затрагивает внутренние зубы фиксированного кругового кольцевого механизма незначительно большего диаметра. Запутывающий происходит одновременно в двух удлиненных концах эллиптического механизма. Этот проект удваивает зубы в mesh, повышая способность крутящего момента системы приводов.
Во время нормального функционирования основной вал управляет генератором волны деформации. Эллиптический разъем вращается свободно в эластичном металлическом механизме, распространяя волну деформации об оси вращения механизма. Эта волна деформации заставляет эллиптические зубы механизма затрагивать внутренние зубы кругового кольцевого механизма прогрессивно.
Внутреннее запутывающее между этими двумя механизмами заставляет эллиптическую ось механизма вращаться в противоречии с эллиптической волной деформации. Для каждого по часовой стрелке вращение, которое генератор волны деформации завершает, эллиптическая ось механизма, вращается против часовой стрелки небольшим количеством.
Большие отношения сокращения являются результатом почти равных зубных чисел механизма. Эффективное отношение сокращения механизма:
где:
r является отношением сокращения механизма.
n C является зубным количеством кругового кольцевого механизма.
n E является зубным количеством деформируемого эллиптического механизма.
Дополнительные параметры вычисляют потери мощности из-за механизма запутывающее и вязкое трение. Блок Simple Gear обеспечивает основу этого блока. Для получения дополнительной информации смотрите Простой Механизм.
Можно смоделировать эффекты теплового потока и изменения температуры путем включения дополнительного теплового порта. Чтобы включить порт, установите Friction model на Temperature-dependent efficiency.
Используйте настройки Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Для оптимальной эффективности вашей симуляции в реальном времени, набор Friction model к No meshing losses - Suitable for HIL simulation на вкладке Meshing Losses.
