Фиксированное расстояние между началами двух систем координат
Ограничения

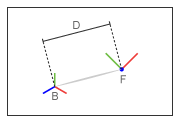
Этот блок применяет фиксированное расстояние между источниками основы и систем координат порта последователя. Системы координат теряют одну поступательную степень свободы друг относительно друга. Ограничительное расстояние между системами координат, пометил D на рисунке, должен быть больше нуля.
Блок обеспечивает ограничительную силу, распознающуюся в форме вектора или величины со знаком. Эти количества содержатся в физических сигналах что блок выходные параметры через порты Simscape™ PS. Ограничительная сила является силой, требуемой обеспечить заданное расстояние между системами координат порта.
Ограничительное расстояние между основой и системами координат последователя. Расстояние должно быть больше нуля. Для расстояния нуля используйте блок Spherical Joint или Gimbal Joint вместо этого. Значением по умолчанию является 1 m.
Выберите, вычислить ли и вывести вектор силы ограничения расстояний и его величину со знаком. Сила ограничения расстояний является силой, которую должен прикладывать блок для того, чтобы обеспечить расстояние, которое вы задаете между основой и системами координат порта последователя.
Ограничение обеспечивает действие в парах. Как описано третьим законом Ньютона движения, если основная система координат порта порождает ограничительную силу на систему координат порта последователя, то система координат порта последователя должна породить равную и противоположную силу на основную систему координат порта. Выберите который из двух ограничительных сил, чтобы распознаться:
Follower on Base — Обнаружьте ограничительную силу, которую система координат порта последователя порождает на основную систему координат порта.
Base on Follower — Обнаружьте ограничительную силу, которую основная система координат порта порождает на систему координат порта последователя.
Блок описывает ограничительный вектор силы в терминах своих Декартовых векторных компонентов. Разделение вектора на векторные компоненты известно как векторное разрешение. Система координат, оси которой задают векторные направления компонента, известна как систему координат разрешения. Выберите, разрешить ли ограничительный вектор силы в основе или системе координат порта последователя.
Вычислите и выведите Декартовы компоненты вектора силы ограничения расстояний. Выходной сигнал является 3D вектором, [f x, f y, f z].
Вычислите и выведите величину силы ограничения расстояний, включая ее знак.
Блок обеспечивает два порта системы координат:
B Порт базовой системы координат
F Порт системы координат последователя
Кроме того, блок обеспечивает два выходных порта физического сигнала:
f Вектор силы ограничения расстояний
из — Величина со знаком силы ограничения расстояний
Angle Constraint | Point on Curve Constraint | Common Gear Constraint | Bevel Gear Constraint | Rack and Pinion Constraint
