Присвойте кинематические переменные из объекта KinematicsSolver как выходные параметры
addOutputVariables( присвоения как выходные переменные кинематические переменные перечислены в ks,ids)KinematicsSolver объект ks под именами, данными в ids аргумент. Оба соединения и переменные системы координат могут служить выходными параметрами. Те, которые делают, являются неизвестными, чтобы решить для и отчет относительно во время анализа. Их решение ограничивается целевыми переменными и смещается к одному из одинаково вероятных решений, когда несколько существуют, наугад переменные.
Выход является обновленной таблицей с выходными переменными — и новый и старый — в строках. Каждая строка дает ID переменной, типа и блока path соединения, которому это принадлежит, если объединенная переменная, база и последующая система координат, от которой это мечет икру если переменная системы координат и модуль для его численного значения. Переменные занимают место в добавленном порядке.
Большинство переменных может быть присвоено индивидуально. Некоторые должны быть присвоены в группах — компоненты оси вместе с углом поворота в сферических примитивах; изогните угол вместе с углом азимута в примитивах постоянной скорости. (Угол поворота может быть присвоен индивидуально, но угол азимута не может.)
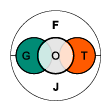
Рисунок показывает переменные общего KinematicsSolver объект. Цель (T), угадайте (G) и выведите переменные (O), может быть объединенные переменные (J) или структурировать переменные (F). Та же переменная может служить предположением и вывести или как цель и вывести, но не как предположение и цель.
KinematicsSolver | outputVariables | clearOutputVariables | removeOutputVariables
