Визуализация модели открывается в Mechanics Explorer — утилита визуализации Simscape™ Multibody™. По умолчанию Mechanics Explorer запускается автоматически, когда вы сначала обновляете модель (во вкладке Modeling, нажмите Update Model), или симулируйте модель. Чтобы изменить эти настройки, смотрите, Включают Mechanics Explorer.
Визуализация состоит из компонентов мультитела, соединяет тела и простые тела, существующие в ваших моделях. Mechanics Explorer отображает сущности модели, такие как геометрия тела, сплайновые кривые, значки инерции и системы координат. Можно выборочно показать и скрыть отдельные сущности с помощью контекстно-зависимого меню области просмотра в виде дерева Mechanics Explorer. Смотрите Выборочную Визуализацию Модели.
Визуализация является статической, когда вы обновляете модель и динамический, когда вы симулируете модель. Статическая визуализация в этом случае показывает модель в своей начальной настройке с соединениями в их начальных состояниях. Динамическая визуализация показывает 3-D анимацию, что можно записать — использующий или Video Creator или smwritevideo функция — видит, Создают Видео Анимации Модели.
Можно управлять точкой зрения использовать полосу инструмента, расположенную выше панели визуализации. Полоса инструмента позволяет вам вращать, прокрутить, панорамировать, и масштабировать представление модели. Camera Manager позволяет вам создать динамические камеры, которые перемещаются с моделью, чтобы сохранить его в поле зрения в процессе моделирования — смотрите Камеры Визуализации.
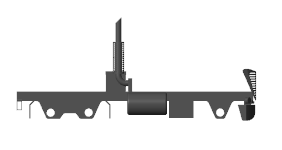
В MATLAB® командная строка, введите sm_cam_flapping_wing. Модель, показанная в показанном примере крыла колебания, открывается.
Во вкладке Modeling нажмите Update Model. Mechanics Explorer открывается в целях модели в ее начальном состоянии.
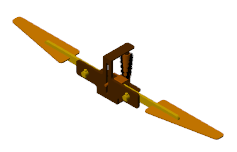
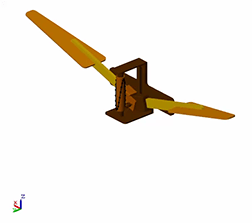
Нажмите Run. Mechanics Explorer проигрывает интерактивную 3-D анимацию на основе результатов симуляции.
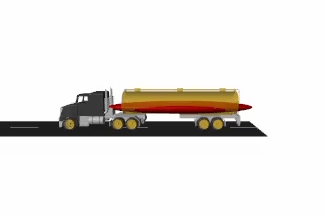
Эквивалентные эллипсоиды инерции обеспечивают интуитивные средние значения, чтобы визуализировать переменную инерцию (смоделированное использование блока General Variable Mass). Эти эллипсоиды представляются динамически с их размерностями и положениями, полученными на каждом временном шаге из заданных мгновенных инерционных свойств. Визуализация эллипсоида не доступна на обновлении модели. Переменные инерционные свойства заданы через физические сигналы, значения которых недоступны блокам, пока симуляция не начинается.
Эллипсоид инерции в модели автоцистерны
Блокируется, такие как Brick Solid, и Spline обеспечивают панели визуализации, которые показывают конфигурации, заданные в разделах блока Parameters. Используйте визуализацию блока, чтобы зафиксировать ошибки геометрии, когда они происходят — например, неправильные размерности, цвета, и, в твердых блоках, структурируют размещения.
Визуализация блока похожа на обеспеченных в Mechanics Explorer. Можно вращать, прокрутить, панорамировать и масштабировать представление с помощью полосы инструмента, расположенной выше панели визуализации. Полоса инструмента включает кнопки для стандартных представлений, таких как Front, Top, и Isometric. Можно показать или скрыть системы координат блока.
Можно обновить визуализацию блока, не обновляясь или симулируя модель. Визуализация обновляет момент, вы нажимаете кнопку Update Visualization в полосе инструмента визуализации. Используя переменные MATLAB в параметрах блоков не влияет на вашу способность обновить визуализацию.
В командной строке MATLAB введите smnew открыть шаблон модели Simscape Multibody. Шаблон содержит обычно используемые блоки, включая блок Brick Solid.
Откройте диалоговое окно блока Brick Solid. Панель визуализации по умолчанию расширена, чтобы показать изометрическое представление тела по умолчанию — серый кирпич.
Установите Graphic> параметр Color к [0.5 0 0]— соответствие вектора RGB темно-красному цвету.
Нажмите кнопку Update Visualization, расположенную выше твердой панели визуализации. Визуализация обновляется, чтобы показать то, что является теперь красным кирпичом.
Можно импортировать геометрию тела из файлов STL или ШАГА. Поврежденные или недопустимые файлы геометрии вызывают проблемы визуализации и симуляции. Конфигурации, сопоставленные с такими файлами, не показывают во время визуализации модели. Соответствующая твердая инерция не может быть автоматически вычислена из геометрии тела и сбоев симуляции, если Inertia> параметр Type установлен в Calculate from Geometry.
Импортированная геометрия тела