Simscape™ Multibody™ обеспечивает получение значений крутящего момента и силы в блоках соединений. Можно использовать эту возможность обнаружения вычислить и вывести различные типы сил и крутящих моментов, действующих непосредственно в соединениях. Обеспечьте и закрутите типы, которые можно обнаружить, включают тех из-за:
Входные параметры приводных шарниров
Ограничения соединений
Входные параметры приводных шарниров, ограничения и внутренняя механика
В этом примере вы исследуете различные типы силы и крутящего момента, обнаруживающего тот Simscape Multibody, который обеспечивают блоки соединений.
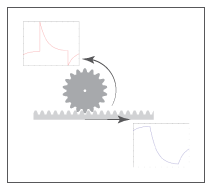
В MATLAB® командная строка, введите smdoc_rack_pinion_c. Simscape Multibody открывает стойку и модель шестерни, которую можно использовать, чтобы исследовать силу и возможность обнаружения крутящего момента блоков соединений.
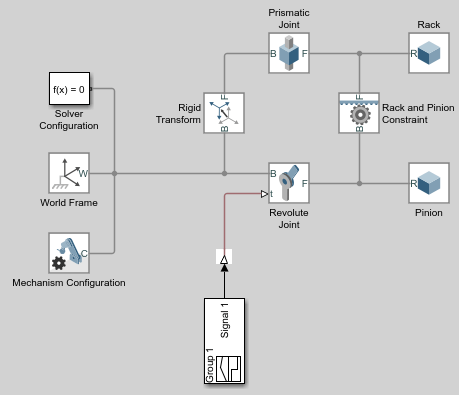
Модель стойки и шестерни содержит вход крутящего момента приведения в действие, который управляет шарнирным соединением шестерни. Блок Simulink-PS Converter обрабатывает входной сигнал с помощью фильтра второго порядка, сглаживая любые резкие изменения или разрывы, которые может иметь сигнал. Обнаруживать крутящий момент приведения в действие, как наблюдается в блоке Revolute Joint:
В диалоговом окне блока Revolute Joint выберите Z Revolute Primitive (Rz)> Sensing> Actuator Torque. Блок осушает порт физического сигнала, пометил t. Это выходы порта 3-D векторные компоненты объединенного привода закручивает в физическом сигнале Simscape.
Перетащите следующие блоки в модель:
PS-Simulink Converter от библиотеки Simscape> Utilities
To Workspace от библиотеки Simulink> Sinks
Соедините блоки как показано на рисунке.
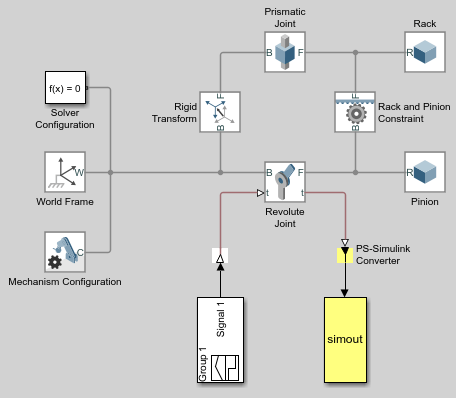
Симулируйте модель. Блок To Workspace выводит сигнал крутящего момента привода в переменную timeseries, simout, доступный в базовом рабочем пространстве MATLAB.
В командной строке MATLAB введите:
figure; plot(simout);
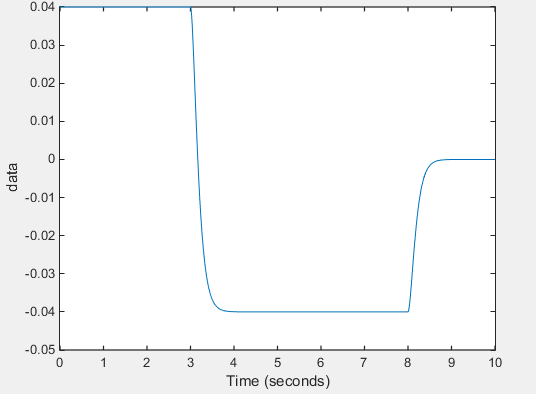
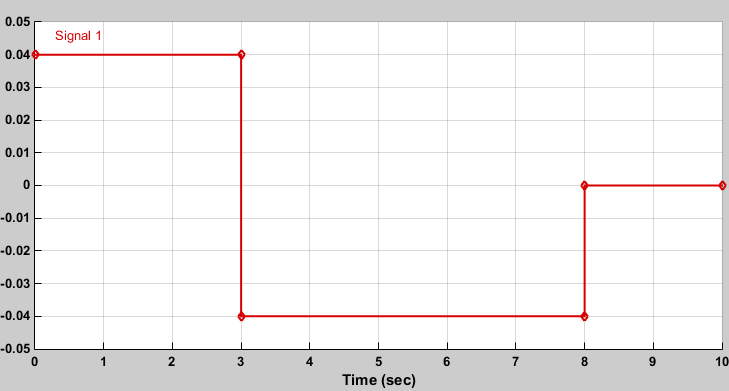
Сравните график крутящего момента привода с исходным входным сигналом в блоке Signal Builder. Пропуская любой сигнал, сглаживающий из-за фильтрации второго порядка, два сигнала идентичны. Следующий рисунок показывает исходный входной сигнал.
Сила привода и обнаружение крутящего момента позволяют вам анализировать необходимые силы и крутящие моменты, чтобы дать к предписанной объединенной траектории. Используйте эту функцию в своей модели, чтобы выполнить обратные динамические и другие типы анализа.
Объединенные ограничительные силы, которые действуют нормальные к объединенным примитивным осям, ограничивают движение выделенными объединенными степенями свободы. В блоке Revolute Joint ограничительные силы сопротивляются получению по запросу силы тяжести, сохраняя шестерню зафиксированной относительно мировой системы координат. Обнаруживать ограничительные силы:
В Блоке Configuration Механизма, набор Uniform Gravity к Constant. Эта установка гарантирует, что сила тяжести действует на систему шестерни и стойку. Проверяйте, что вектором силы тяжести является [0 0 -9.80665].
В диалоговом окне блока Revolute Joint выберите Composite Force/Torque Sensing> Constraint Force. Блок осушает порт физического сигнала ФК. Этот порт обеспечивает векторные компоненты ограничительной силы всего соединения в физическом сигнале Simscape. По умолчанию это - ограничительная сила, которую система координат порта последователя порождает на основную систему координат порта, разрешенную в основной системе координат порта.
Отмените выбор Z Revolute Primitive (Rz)> Sensing> Actuator Torque.
Проверяйте, что блок PS-Simulink Converter теперь соединяет с портом физического сигнала ФК.
Симулируйте модель. В командной строке MATLAB введите:
figure; plot(simout);
Ограничительные силы гарантируют, что системы координат сварного шва остаются фиксированными друг относительно друга. Можно поместить блок Weld Joint в подсистеме тела, чтобы обнаружить внутренние силы и крутящие моменты, действующие в том теле в процессе моделирования. Для примера того, как можно сделать это в двойной модели маятника, смотрите Ограничительные Силы Смысла.
В дополнение к силам приведения в действие и ограничения и крутящим моментам, объединенные системы координат могут также взаимодействовать путем обмена внутренними силами и крутящими моментами. Эти силы и крутящие моменты, которые происходят из-за пружины и элементов демпфера, внутренних к самому соединению, включают вам с учетом механического энергетического рассеяния и устройства хранения данных между объединенными системами координат. Можно обнаружить общую составную силу и крутящий момент, действующий в соединении, которое включает вклады от приведения в действие, ограничения, и внутренних сил и крутящих моментов. Обнаруживать общий крутящий момент, действующий между системами координат порта блока Revolute Joint:
В диалоговом окне блока Revolute Joint выберите Composite Force/Torque Sensing> Total Torque. Блок осушает порт физического сигнала tt. Это выходы порта общий крутящий момент, действующий между соединением, структурирует как физический сигнал Simscape.
Отмените выбор Composite Force/Torque Sensing> Constraint Force.
Симулируйте модель.
В командной строке MATLAB введите:
figure; plot(simout);
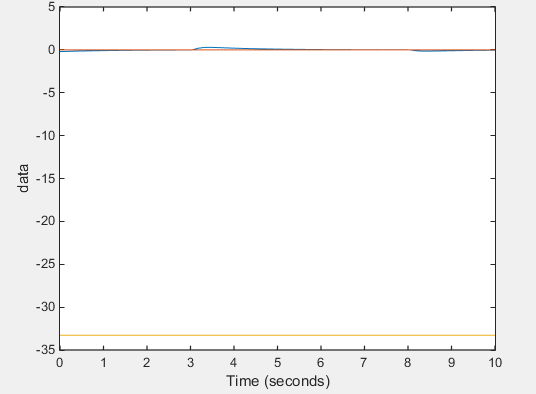
Графики MATLAB векторные компоненты общего вектора крутящего момента в зависимости от времени. Все кроме одного компонента - нуль в течение симуляции. Ненулевой компонент, крутящий момент, направленный об оси Z, содержит вклады крутящего момента от приведения в действие и внутренних крутящих моментов, но ни одного от ограничительных крутящих моментов.
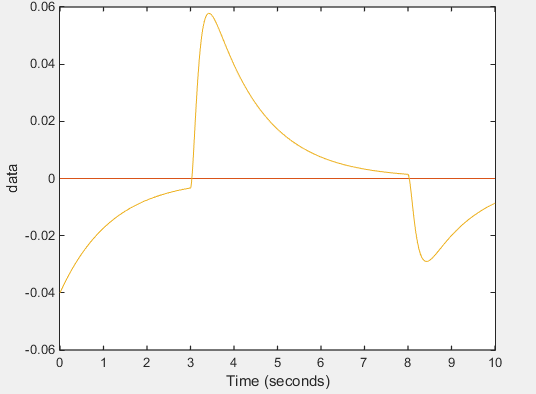
Peaks крутящего момента соответствует значениям крутящего момента приведения в действие, заданным во входном сигнале. Этот peaks затухает со временем из-за внутренних крутящих моментов затухания, заданных в диалоговом окне блока Revolute Joint. Крутящие моменты затухания вызывают энергетическое рассеяние, очевидное в переходных фрагментах общего графика крутящего момента.
Чтобы проверить, что общий крутящий момент исключает любой вклад из ограничительных крутящих моментов, попытайтесь обнаружить ограничительные крутящие моменты непосредственно. График ограничительных крутящих моментов покажет, что они на самом деле незначительны.
