Разработка системы и определения архитектуры могут включить определение поведения для некоторых компонентов, таких как алгоритм для компонента обработки данных. Задайте компоненты в моделях архитектуры System Composer™ как встроенные поведения с помощью Simulink® компоненты подсистемы или поведения, на которые ссылаются, путем соединения компонентов с моделями Simulink.
Можно симулировать реализации компонента Simulink в System Composer. Наблюдать результаты симуляции, Данные о виде на море в Инспекторе Данных моделирования.
В этом примере показано, как использовать модель манипулятора, чтобы создать поведение Simulink® из Motion компонент.
1. Откройте Robot.slx модель.
model = systemcomposer.openModel('Robot');
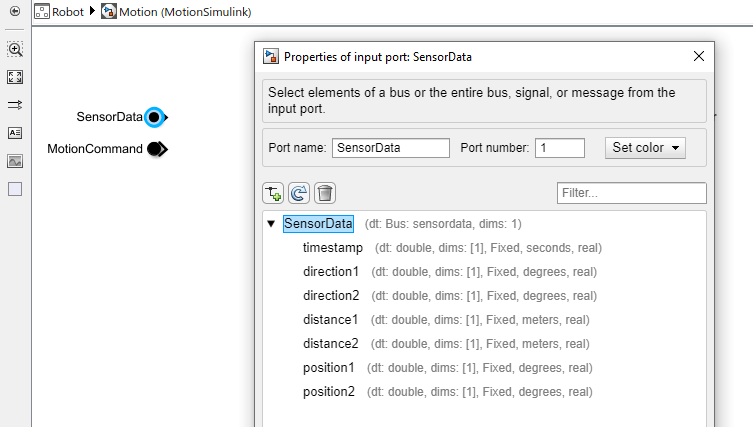
Robot модель имеет интерфейс sensordata примененный на порты SensorData.
2. Ищите Motion компонент.
motionComp = lookup(model,'Path','Robot/Motion');
3. Создайте поведение Simulink.
motionComp.createSimulinkBehavior('MotionSimulink');
Когда компонент не требует разложения от точки зрения архитектуры, можно спроектировать и задать ее поведение в Simulink. Когда вы соединяетесь с поведением Simulink, блок Component становится блоком Reference Component. reference component представляет логическую иерархию других составов. Можно снова использовать составы в модели при помощи ссылочных компонентов.
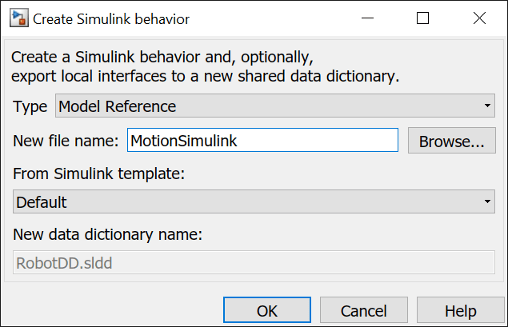
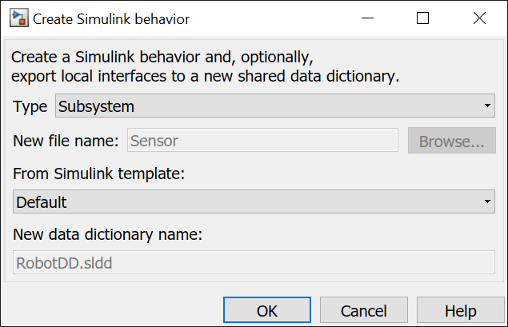
Щелкните правой кнопкой по Motion компонент и выбирает Create Simulink Behavior. В качестве альтернативы перейдите к Modeling> Component> Create Simulink Behavior.
Из списка Type выберите Model Reference. Предоставьте имени модели MotionSimulink. Имя по умолчанию является именем компонента.
Создается новая модель Simulink с обеспеченным именем. Корневые порты уровня модели Simulink отражают порты компонента. Компонент в модели архитектуры соединяется с моделью Simulink.![]() Значок на компоненте указывает, что компонент имеет поведение Simulink.
Значок на компоненте указывает, что компонент имеет поведение Simulink.
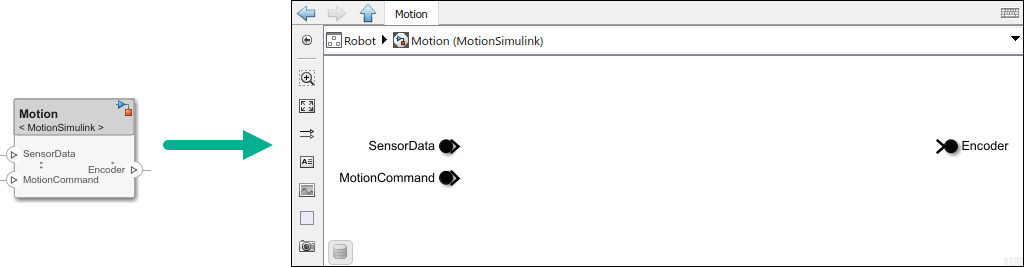
Можно продолжить обеспечивать определенную динамику и алгоритмы в модели Simulink, на которую ссылаются. Добавление портов корневого уровня в модели Simulink создает дополнительные порты на блоке System Composer Reference Component.
Просмотреть интерфейсы на SensorData порт, преобразованный в элементы шины Simulink, дважды кликните на порте в Simulink.
Можно получить доступ и отредактировать модель Simulink, на которую ссылаются, путем двойного клика по компоненту в модели архитектуры. Когда вы сохраняете модель архитектуры, все несохраненное поведение Simulink моделирует ее, ссылки также сохранены, и обновляются все соединенные компоненты.
subsystem component является Подсистема Simulink, которая является частью родительской модели архитектуры System Composer. Добавьте поведение Подсистемы Simulink в компонент, чтобы создать компонент подсистемы в System Composer. Вы не можете синхронизироваться и компоненты подсистемы повторного использования, когда Reference Component блокируется, потому что компонент является частью родительской модели.
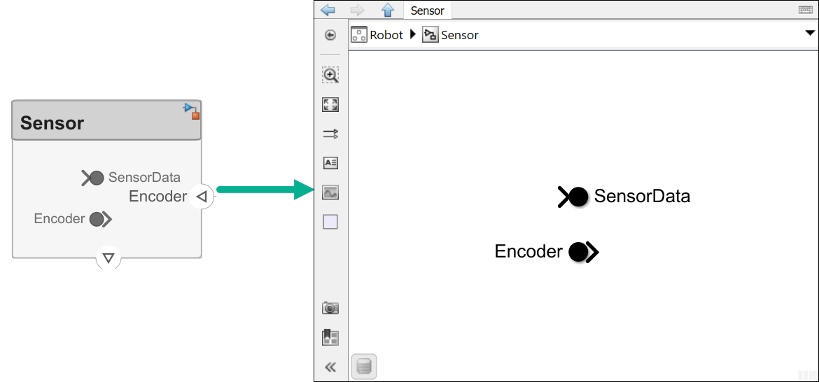
Щелкните правой кнопкой по Sensor компонент и выбирает Create Simulink Behavior. В качестве альтернативы перейдите к Modeling> Component> Create Simulink Behavior.
Из списка Type выберите Subsystem.
Sensor компонентом является теперь Подсистема Simulink того же имени, которое является частью родительской модели архитектуры System Composer.
Порты корневого уровня модели Simulink отражают порты компонента.![]() Значок на компоненте указывает, что компонент имеет поведение Подсистемы Simulink.
Значок на компоненте указывает, что компонент имеет поведение Подсистемы Simulink.
Можно продолжить обеспечивать определенную динамику и алгоритмы во встроенной модели поведения Simulink. Добавление портов корневого уровня во встроенной модели Simulink создает дополнительные порты на компоненте Подсистемы Simulink.
Компоненты подсистемы требуются, чтобы автор поведения компонента Simscape™ с физическими портами, связями и блоками. Например, эта физическая система усилителя использует электрические доменные блоки в компоненте подсистемы в модели архитектуры System Composer.
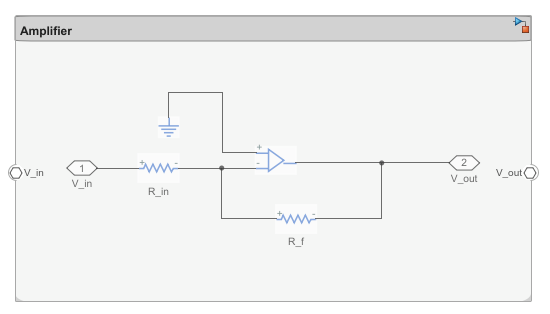
Для получения дополнительной информации смотрите, Описывают Поведение Компонента Используя Simscape.
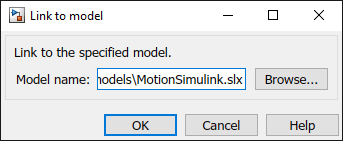
Можно соединиться с существующей моделью поведения Simulink от компонента System Composer, при условии, что компонент уже не соединяется с эталонной архитектурой. Щелкните правой кнопкой по компоненту и выберите Link to Model. Введите или просмотрите имя модели Simulink.
Любые субкомпоненты и порты в компонентах удалены, когда компонент соединяется с моделью Simulink. Подсказка отображается, чтобы продолжить и потерять субкомпоненты и порты.
Примечание
Соединение компонента System Composer к модели Simulink с корневым уровнем включает или инициировало порты, не поддерживается.
Можно соединить защищенные модели Simulink (.slxp) создать поведения компонента. Можно также преобразовать уже соединенную модель поведения Simulink с защищенной моделью. Изменение отражается, когда вы обновляете модель.
Чтобы создать пользовательские шаблоны для моделей Simulink, смотрите, Создают Шаблон из Модели.
После создания и сохранения пользовательского шаблона, можно соединить шаблон с поведением Simulink. Щелкните правой кнопкой по компоненту и выберите Create Simulink Behavior, или, перейдите к Modeling> Component> Create Simulink Behavior.
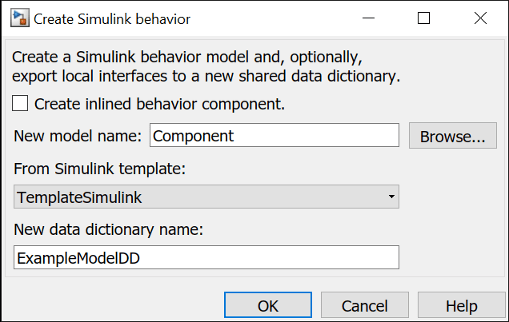
На диалоговом окне Create Simulink behavior выберите шаблон и введите новое имя словаря данных, если локальные интерфейсы заданы. Нажмите OK. Компонент предоставляет поведение Simulink согласно шаблону с разделяемыми интерфейсами, если существующий. Блоки и линии в шаблоне исключены, и только параметры конфигурации сохраняются. Параметры конфигурации включают аннотации и моделирование.
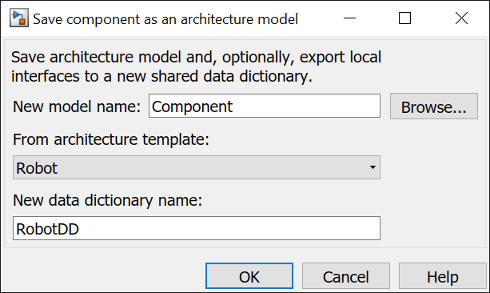
Обратите внимание на то, что можно использовать шаблоны архитектуры путем щелчка правой кнопкой по компоненту и выбора Save As Architecture Model, или навигация к Modeling> Component> Save As Architecture Model.