Модель Guidance для БПЛА мультиротора
multirotor объект представляет модель руководства уменьшаемого порядка для беспилотного воздушного транспортного средства (UAV). Модель аппроксимирует поведение системы с обратной связью, состоящей из контроллера автопилота и мультиротора кинематическая модель для 3-D движения.
Для БПЛА фиксированного крыла смотрите fixedwing.
model = multirotor создает модель движения мультиротора с double значения точности для входных параметров, выходных параметров и параметров конфигурации модели руководства.
model = multirotor(DataType) задает точность типа данных (DataType свойство) для входных параметров, выходных параметров и параметров настроек модели руководства.
control | Управляйте командами для UAV |
derivative | Производная времени состояний UAV |
environment | Экологические входные параметры для UAV |
state | Вектор состояния UAV |
В этом примере показано, как использовать multirotor модель руководства, чтобы симулировать изменение в состоянии UAV из-за ввода команд.
Создайте модель руководства мультиротора.
model = multirotor;
Создайте структуру состояния. Задайте местоположение в мировых координатах.
s = state(model); s(1:3) = [3;2;1];
Задайте команду управления, u, это задало крен и тягу мультиротора.
u = control(model); u.Roll = pi/12; u.Thrust = 1;
Создайте стандартную среду без ветра.
e = environment(model);
Вычислите производную времени состояния, учитывая текущее состояние, управляйте командой и средой.
sdot = derivative(model,s,u,e);
Симулируйте состояние UAV использование ode45 интегрирование. y поле выводит мультиротор состояния UAV как 13 n матрицей.
simOut = ode45(@(~,x)derivative(model,x,u,e), [0 3], s); size(simOut.y)
ans = 1×2
13 3536
Постройте изменение в крене на основе симуляции выход. Крен (X Углов Эйлера) является 9-й строкой simOut.y вывод .
plot(simOut.y(9,:))

Постройте изменение в Y и положениях Z. С заданной тягой и креном, мультиротор должен пролететь и потерять некоторую высоту. Положительное значение для Z ожидается, когда положительный Z снижается.
figure plot(simOut.y(2,:)); hold on plot(simOut.y(3,:)); legend('Y-position','Z-position') hold off

Можно также построить траекторию мультиротора с помощью plotTransforms. Создайте векторы перевода и вращения из симулированного состояния. Downsample (каждый 300-й элемент) и транспонирует simOut элементы, и преобразуют Углы Эйлера в кватернионы. Задайте mesh как multirotor.stl файл и положительное Z-направление как "down". Отображенное представление показывает перевод UAV в направлении Y и потерю высоты.
translations = simOut.y(1:3,1:300:end)'; % xyz position rotations = eul2quat(simOut.y(7:9,1:300:end)'); % ZYX Euler plotTransforms(translations,rotations,... 'MeshFilePath','multirotor.stl','InertialZDirection',"down") view([90.00 -0.60])

Для мультироторов следующие уравнения используются, чтобы задать модель руководства UAV. Чтобы вычислить производную времени состояния UAV, использующего эти управляющие уравнения, используйте derivative функция. Задайте входное использование state, control, и environment.
Положением UAV в наземной системе координат является [xe, ye, ze] с ориентацией как Углы Эйлера ZYX, [ψ, ϴ, ϕ] в радианах. Скоростями вращения является [p, q, r] в радианах в секунду.
Система координат тела UAV использует координаты в качестве [xb, yb, zb].
Матрица вращения, которая вращается от мира до системы координат тела:
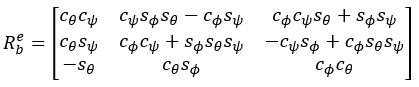
Because(x), и sin (x) сокращены как cx и sx.
Ускорением центра UAV массы в наземных координатах управляют:
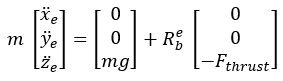
m является массой UAV, g является силой тяжести, и Fthrust является общей силой, созданной пропеллерами, применился к мультиротору вдоль –zb оси (точки вверх в горизонтальном положении).
Контроллер отношения тангажа крена с обратной связью аппроксимирует поведение 2 независимых контроллеров PD для этих двух углов поворота и 2 независимых контроллеров P для уровня рыскания и втискивают. Скоростью вращения, угловым ускорением и тягой управляют:
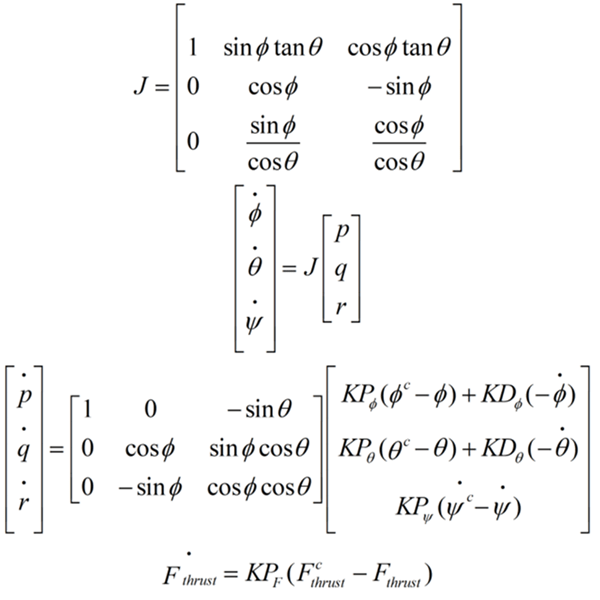
Эта модель принимает, что автопилот берет в крене, которым управляют, тангаже, уровне рыскания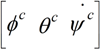 и общей силе тяги, которой управляют, Fcтяга. Структура, чтобы задать эти входные параметры сгенерирована от
и общей силе тяги, которой управляют, Fcтяга. Структура, чтобы задать эти входные параметры сгенерирована от control.
Усиления P и D для входных параметров управления заданы как KPα и KDα, где α является или углом поворота или тягой. Эти усиления наряду с массой UAV, m, заданы в Configuration свойство multirotor объект.
От этих управляющих уравнений модель дает следующие переменные: ![]()
Эти переменные совпадают с выходом state функция.
[1] Mellinger, Дэниел и Натан Майкл. "Генерация траектории и Управление для Точных Агрессивных Маневров с Quadrotors". Международный журнал Исследования Робототехники. 2012, стр 664-74.
ode45 | control | derivative | environment | state | plotTransforms