Модель датчика камеры с линзой в 3D среде симуляции
UAV Toolbox / 3D Симуляция
Automated Driving Toolbox / 3D Симуляция
Блок Simulation 3D Camera обеспечивает интерфейс к камере с линзой в 3D среде симуляции. Эта среда представляется с помощью Нереального Engine® от эпических игр®. Датчик основан на идеальной модели камеры с точечной диафрагмой, с линзой, добавленной, чтобы представлять полную модель камеры, включая искажение объектива. Эта модель камеры поддерживает поле зрения до 150 градусов. Для получения дополнительной информации см. Алгоритмы.
Если вы устанавливаете Sample time на -1, блок использует шаг расчета, заданный в блоке Simulation 3D Scene Configuration. Чтобы использовать этот датчик, необходимо включать блок Simulation 3D Scene Configuration в модель.
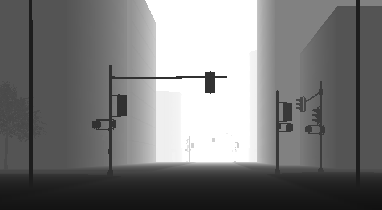
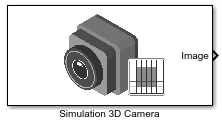
Блок выходные изображения, полученные камерой в процессе моделирования. Можно использовать эти изображения, чтобы визуализировать и проверить ведущие алгоритмы. Кроме того, на вкладке Ground Truth, можно выбрать опции, чтобы вывести достоверные данные для разработки оценки глубины и алгоритмов семантической сегментации. Можно также вывести местоположение и ориентацию камеры в системе мировой координаты сцены. Изображение показывает блок со всеми включенными портами.
Таблица суммирует порты и как включить им.
| Порт | Описание | Параметр для включения порта | Демонстрационная визуализация |
|---|---|---|---|
Image | Выводит изображение RGB, полученное камерой | n/A |
|
Depth | Выводит карту глубины со значениями от 0 м до 1 000 метров | Output depth |
|
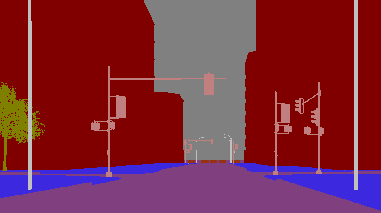
Labels | Выводит карту семантической сегментации метки IDs, которые соответствуют объектам в сцене | Output semantic segmentation |
|
Location | Выводит местоположение камеры в системе мировой координаты | Output location (m) and orientation (rad) | n/A |
Orientation | Выводит ориентацию камеры в системе мировой координаты | Output location (m) and orientation (rad) | n/A |
Примечание
Блок Simulation 3D Scene Configuration должен выполниться перед блоком Simulation 3D Camera. Тем путем Нереальный Engine, 3D среда визуализации готовит данные перед блоком Simulation 3D Camera, получает его. Чтобы проверять порядок выполнения блока, щелкните правой кнопкой по блокам и выберите Properties. На вкладке General подтвердите эти настройки Priority:
Simulation 3D Scene Configuration — 0
Simulation 3D Camera — 1
Для получения дополнительной информации о порядке выполнения, смотрите Порядок выполнения Блока.
Sensor identifier — Уникальный идентификатор датчикаУникальный идентификатор датчика в виде положительного целого числа. В системе мультидатчика идентификатор датчика различает датчики. Когда вы добавляете новый блок датчика в свою модель, Sensor identifier того блока является N + 1. N является самым высоким значением Sensor identifier среди существующих блоков датчика в модели.
Пример 2
Parent name — Имя родительского элемента, к которому смонтирован датчикScene Origin (значение по умолчанию) | имя транспортного средстваИмя родительского элемента, к которому датчик смонтирован в виде Scene Origin или как имя транспортного средства в вашей модели. Имена транспортного средства, которые можно выбрать, соответствуют параметрам Name симуляции 3D блоки транспортного средства в модели. Если вы выбираете Scene Origin, блок помещает датчик в начале координат сцены.
Пример: SimulinkVehicle1
Mounting location — Местоположение монтирования датчикаOrigin (значение по умолчанию)Местоположение монтирования датчика.
Когда Parent name является Scene Origin, подставки под клише датчик до начала координат сцены и Mounting location могут быть установлены в Origin только. В процессе моделирования датчик остается стационарным.
Когда Parent name является именем транспортного средства (например, SimulinkVehicle1) подставки под клише датчик к одному из предопределенных местоположений монтирования описаны в таблице. В процессе моделирования датчик перемещается с транспортным средством.
| Местоположение монтирования транспортного средства | Описание | Ориентация относительно источника транспортного средства [крен, тангаж, рыскание] (градус) |
|---|---|---|
Origin | Датчик по ходу движения смонтировался к источнику транспортного средства, который находится на земле в геометрическом центре транспортного средства
| [0, 0, 0] |
Прокрутитесь, сделайте подачу, и рыскание по часовой стрелке положительно при взгляде в положительном направлении Оси X, Оси Y и оси Z, соответственно. При рассмотрении транспортного средства от верхней части вниз, затем угол рыскания (то есть, угол ориентации) против часовой стрелки положительны, потому что вы смотрите в обратном направлении оси.
(X, Y, Z) монтирующееся местоположение датчика относительно транспортного средства зависит от типа транспортного средства. Чтобы задать тип транспортного средства, используйте параметр Type блока Simulation 3D UAV Vehicle, с которым вы монтируетесь. Получить (X, Y, Z) монтирующиеся местоположения для типа транспортного средства, смотрите страницу с описанием для того транспортного средства.
Чтобы определить местоположение датчика в мировых координатах, откройте блок датчика. Затем на вкладке Ground Truth выберите Output location (m) and orientation (rad) и смотрите данные из выходного порта Location.
Specify offset — Задайте смещение от монтирующегося местоположенияoff (значение по умолчанию) | onВыберите этот параметр, чтобы задать смещение от монтирующегося местоположения при помощи параметров Relative rotation [Roll, Pitch, Yaw] (deg) и Relative translation [X, Y, Z] (m).
Relative translation [X, Y, Z] (m) — Перевод возмещен относительно монтирующегося местоположенияСмещение перевода относительно монтирующегося местоположения датчика в виде с действительным знаком 1 3 вектор из формы [X, Y, Z]. Величины в метрах.
Если вы монтируете датчик к транспортному средству установкой Parent name к имени того транспортного средства, то X, Y, и Z находятся в системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает слева от транспортного средства, как просматривается при взгляде в прямом направлении транспортного средства.
Ось Z подчеркивает.
Источник является монтирующимся местоположением, заданным в параметре Mounting location. Этот источник отличается от источника транспортного средства, который является геометрическим центром транспортного средства.
Если вы монтируете датчик к источнику сцены установкой Parent name к Scene Origin, затем X, Y, и Z находятся в мировых координатах сцены.
Для получения дополнительной информации о транспортном средстве и системах мировой координаты, смотрите Системы координат для Нереальной Симуляции Engine в UAV Toolbox.
Пример: [0,0,0.01]
Чтобы настроить относительный перевод датчика в процессе моделирования, включите входной порт Translation путем выбора параметра Input рядом с параметром Relative translation [X, Y, Z] (m). Когда вы включаете порт Translation, параметр Relative translation [X, Y, Z] (m) задает начальный относительный перевод датчика, и порт Translation задает относительный перевод датчика в процессе моделирования. Для получения дополнительной информации об относительном переводе и вращении этого датчика, смотрите Преобразование Положения Датчика.
Чтобы включить этот параметр, выберите Specify offset.
Relative rotation [Roll, Pitch, Yaw] (deg) — Вращательное смещение относительно монтирующегося местоположенияВращательное смещение относительно монтирующегося местоположения датчика в виде с действительным знаком 1 3 вектор из формы [Крен, Тангаж, Рыскание]. Прокрутитесь, сделайте подачу, и рыскание является углами вращения вокруг X-, Y-и осей Z, соответственно. Модули в градусах.
Если вы монтируете датчик к транспортному средству установкой Parent name к имени того транспортного средства, то X, Y, и Z находятся в системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает слева от транспортного средства, как просматривается при взгляде в прямом направлении транспортного средства.
Ось Z подчеркивает.
Прокрутитесь, сделайте подачу, и рыскание по часовой стрелке положительно при взгляде в прямом направлении Оси X, Оси Y и оси Z, соответственно. Если вы просматриваете сцену из 2D нисходящей перспективы, то угол рыскания (также названный углом ориентации) против часовой стрелки положителен, потому что вы просматриваете сцену в обратном направлении оси Z.
Источник является монтирующимся местоположением, заданным в параметре Mounting location. Этот источник отличается от источника транспортного средства, который является геометрическим центром транспортного средства.
Если вы монтируете датчик к источнику сцены установкой Parent name к Scene Origin, затем X, Y, и Z находятся в мировых координатах сцены.
Для получения дополнительной информации о транспортном средстве и системах мировой координаты, смотрите Системы координат для Нереальной Симуляции Engine в UAV Toolbox.
Пример: [0,0,10]
Чтобы настроить относительное вращение датчика в процессе моделирования, включите входной порт Rotation путем выбора параметра Input рядом с параметром Relative rotation [Roll, Pitch, Yaw] (deg). Когда вы включаете порт Rotation, параметр Relative rotation [Roll, Pitch, Yaw] (deg) задает начальное относительное вращение датчика, и порт Rotation задает относительное вращение датчика в процессе моделирования. Для получения дополнительной информации об относительном переводе и вращении этого датчика, смотрите Преобразование Положения Датчика.
Чтобы включить этот параметр, выберите Specify offset.
Sample time Размер шагаШаг расчета блока в секундах в виде положительной скалярной величины. 3D частота кадров среды симуляции является инверсией шага расчета.
Если вы устанавливаете шаг расчета на -1, блок наследовал свой шаг расчета от блока Simulation 3D Scene Configuration.
Эти внутренние параметры камеры эквивалентны свойствам cameraIntrinsics Объект (Computer Vision Toolbox). Чтобы получить внутренние параметры для вашей камеры, используйте приложение Camera Calibrator.
Для получения дополнительной информации о процессе калибровки фотоаппарата, смотрите Используя Одно Приложение Camera Calibrator (Computer Vision Toolbox) и Что такое Калибровка фотоаппарата? (Computer Vision Toolbox).
Focal length (pixels) — Фокусное расстояние камерыФокусное расстояние камеры в виде 1 2 положительного целочисленного вектора из формы [fx, fy]. Модули находятся в пикселях.
fx = F × sx
fy = F × sy
где:
F является фокусным расстоянием в мировых единицах измерения, обычно миллиметры.
[sx, sy] является количеством пикселей на мировую единицу измерения в x и направлении y, соответственно.
Этот параметр эквивалентен FocalLength Свойство (Computer Vision Toolbox) cameraIntrinsics объект.
Optical center (pixels) — Оптический центр камерыОптический центр камеры в виде 1 2 положительного целочисленного вектора из формы [cx, cy]. Модули находятся в пикселях.
Этот параметр эквивалентен PrincipalPoint Свойство (Computer Vision Toolbox) cameraIntrinsics объект.
Image size (pixels) — Размер изображения производится камеройРазмер изображения, произведенный камерой в виде 1 2 положительного целочисленного вектора из формы [mrows, ncols]. Модули находятся в пикселях.
Этот параметр эквивалентен ImageSize Свойство (Computer Vision Toolbox) cameraIntrinsics объект.
Radial distortion coefficients — Радиальные коэффициенты искаженияРадиальные коэффициенты искажения в виде с действительным знаком 1 2 или 1 3 неотрицательного вектора. Радиальное искажение происходит, когда световые лучи изгибают больше, чем ребра линзы, чем они делают в ее оптическом центре. Искажение больше, когда линза меньшего размера. Блок вычисляет радиально искаженное местоположение точки. Модули являются безразмерными.
Этот параметр эквивалентен RadialDistortion Свойство (Computer Vision Toolbox) cameraIntrinsics объект.
Tangential distortion coefficients — Тангенциальные коэффициенты искаженияТангенциальные коэффициенты искажения в виде с действительным знаком 1 2 неотрицательный вектор. Тангенциальное искажение происходит, когда линза и плоскость изображения не параллельны. Координаты описываются в мировых единицах измерения. Модули являются безразмерными.
Этот параметр эквивалентен TangentialDistortion Свойство (Computer Vision Toolbox) cameraIntrinsics объект.
Axis skew — Скошенный угол осей камерыСкошенный угол осей камеры в виде неотрицательного скаляра. Если Ось X и Ось Y точно перпендикулярны, то скосом должен быть 0. Модули являются безразмерными.
Этот параметр эквивалентен Skew Свойство (Computer Vision Toolbox) cameraIntrinsics объект.
Output depth — Выведите карту глубиныoff (значение по умолчанию) | onВыберите этот параметр, чтобы вывести карту глубины в порте Depth.
Output semantic segmentation — Выведите карту семантической сегментации метки IDsoff (значение по умолчанию) | onВыберите этот параметр, чтобы вывести карту семантической сегментации метки IDs в порте Labels.
Output location (m) and orientation (rad) — Выведите местоположение и ориентацию датчикаoff (значение по умолчанию) | onВыберите этот параметр, чтобы вывести местоположение и ориентацию датчика в портах Location и Orientation, соответственно.
Чтобы визуализировать изображения камеры, которые выводятся портом Image, используйте блок Video Viewer (Computer Vision Toolbox) или To Video Display (Computer Vision Toolbox).
Чтобы изучить, как визуализировать глубину и карты семантической сегментации, которые выводятся портами Depth и Labels, смотрите Глубину и Визуализацию Семантической Сегментации Используя Нереальный пример Симуляции Engine.
Поскольку Нереальный Engine может занять много времени, чтобы запуститься между симуляциями, рассмотреть логгирование сигналов, что датчики выводят. Можно затем использовать эти данные, чтобы разработать алгоритмы восприятия в MATLAB®. Смотрите конфигурируют сигнал для логгирования (Simulink).
Блок использует модель камеры, предложенную Жан-Ивом Буге [1]. Модель включает:
Модель [2] камеры с точечной диафрагмой
Искажение объектива [3]
Модель камеры с точечной диафрагмой не составляет искажение объектива, потому что идеальная камера с точечной диафрагмой не имеет линзы. Чтобы точно представлять действительную камеру, полная модель камеры, используемая блоком, включает радиальное и тангенциальное искажение объектива.
Для получения дополнительной информации смотрите то, Что Калибровка фотоаппарата? (Computer Vision Toolbox)
[1] Bouguet, J. Y. Тулбокс Калибровки фотоаппарата для MATLAB. http://www.vision.caltech.edu/bouguetj/calib_doc
[2] Чжан, Z. "Гибкий Новый техник для Калибровки фотоаппарата". Транзакции IEEE согласно Анализу Шаблона и Искусственному интеллекту. Издание 22, № 11, 2000, стр 1330–1334.
[3] Heikkila, J. и О. Сильвен. “Процедура калибровки фотоаппарата с четырьмя шагами с неявной коррекцией изображений”. Международная конференция IEEE по вопросам компьютерного зрения и распознавания образов. 1997.
cameraIntrinsics (Computer Vision Toolbox)