Динамическое регулирование для Акермана, реечного механизма и параллельных рулевых механизмов
Vehicle Dynamics Blockset / регулирование
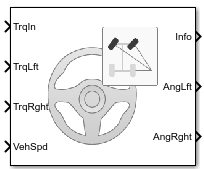
Блок Dynamic Steering реализует динамическое регулирование, чтобы вычислить углы колеса для Акермана, реечного механизма и параллельных рулевых механизмов. Блок использует входной крутящий момент руля, правильный крутящий момент колеса и оставленный крутящий момент колеса, чтобы вычислить углы колеса. Блок использует систему координат транспортного средства.
Если вы выбираете Power assist, можно указать, что крутящий момент помогает интерполяционной таблице, которая является функцией скорости транспортного средства и входного крутящего момента руля. Блок использует входной крутящий момент руля, и крутящий момент помогают вычислять держащуюся динамику.
Чтобы задать держащийся тип, используйте параметр Type.
| Установка | Блокируйте реализацию |
|---|---|
| Идеал Акерман, держащийся. Углы колеса имеют общий центр круга превращения. |
| Идеальное регулирование реечного механизма. Механизмы преобразуют держащееся вращение в линейное движение. |
| Параллельное регулирование. Углы колеса равны. |
Чтобы задать тип данных для рулевого механизма, используйте параметр Parametrized by.
| Установка | Блокируйте реализацию |
|---|---|
| Рулевой механизм использует постоянные данные о параметре. |
| Рулевой механизм реализует таблицы для данных о параметре. |
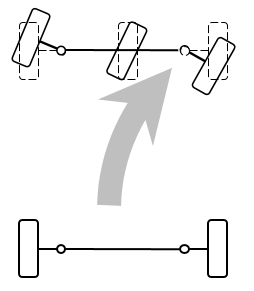
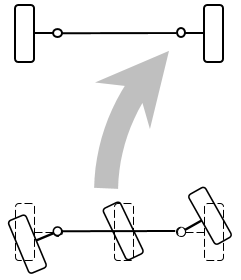
Используйте параметр Location, чтобы задать переднее или заднее регулирование.
| Установка | Реализация |
|---|---|
| Front |
Переднее регулирование
|
| Rear |
Заднее регулирование
|
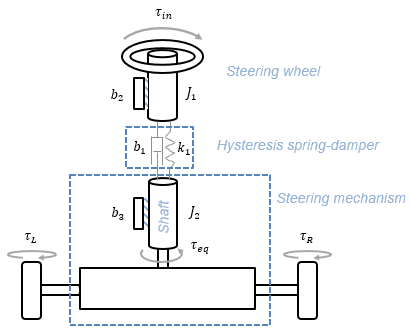
Чтобы вычислить держащуюся динамику, блок Dynamic Steering моделирует руль, вал, рулевой механизм, гистерезис, и, опционально, степень помогают.
| Вычисление | Уравнения |
|---|---|
|
Рулевая колонка и держащаяся динамика вала |
|
|
Гистерезисный пружинный демпфер |
|
|
Дополнительная степень помогает |
|
Рисунок и уравнения используют эти переменные.
| J1 |
Инерция руля |
| J2 |
Инерция рулевого механизма |
|
Угол руля, скорость вращения и угловое ускорение, соответственно | |
|
Угол вала, скорость вращения и угловое ускорение, соответственно | |
| b1, k1 |
Гистерезисные пружинные и вязкие коэффициенты демпфирования, соответственно |
| b2 |
Руль вязкий коэффициент демпфирования |
| b3 |
Коэффициент демпфирования рулевого механизма |
| τhys |
Гистерезисный крутящий момент затухания пружины |
| τfric |
Момент трения рулевого механизма |
| τeq |
Колесо эквивалентный крутящий момент |
| τast |
Крутящий момент помогает |
| βu , βl |
Верхние и более низкие гистерезисные модификаторы, соответственно |
| v |
Скорость транспортного средства |
| ƒtrq |
Крутящий момент помогает интерполяционной таблице |
Для идеала Акерман, держащийся, углы колеса имеют общий круг превращения.
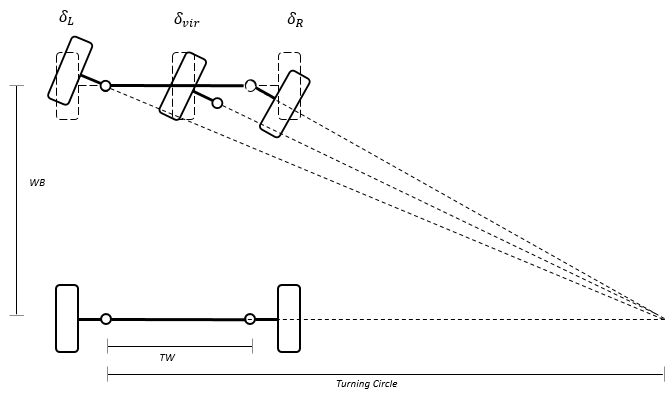
Чтобы вычислить держащиеся углы, блок использует эти уравнения.
Рисунок и уравнения используют эти переменные.
| δin |
Регулирование угла |
| δL |
Оставленный угол колеса |
| δR |
Правильный угол колеса |
| δvir |
Виртуальный угол колеса |
| TW |
Ширина дорожки |
| WB |
Основа колеса |
| γ |
Регулирование отношения |
Для идеального регулирования реечного механизма механизмы преобразуют держащееся вращение в линейное движение.
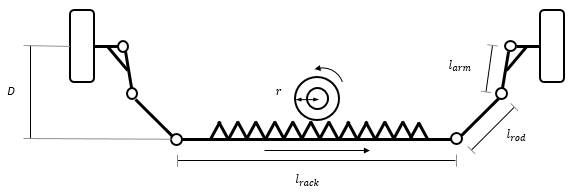
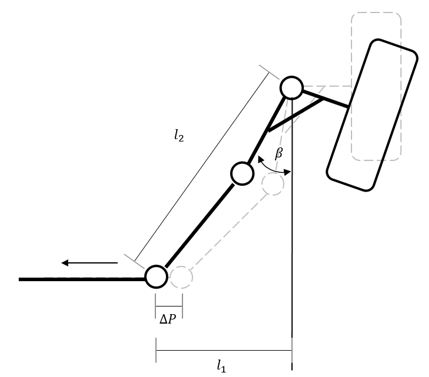
Чтобы вычислить держащиеся углы, блок использует эти уравнения.
Рисунок и уравнения используют эти переменные.
| δin |
Угол руля |
| δL |
Оставленный угол колеса |
| δR |
Правильный угол колеса |
| TW |
Ширина дорожки |
| r |
Свяжите радиус |
| ΔP |
Линейное изменение в положении стойки |
| D |
Расстояние между передней осью и стойкой |
| lrack |
Установите случающуюся длину в стойку |
| larm |
Регулирование длины руки |
| lrod |
Свяжите длину стержня |
Для параллельного регулирования углы колеса равны.
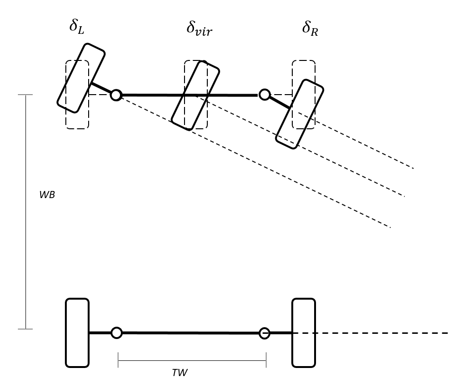
Чтобы вычислить держащиеся углы, блок использует это уравнение.
Рисунок и уравнения используют эти переменные.
| δin |
Угол руля |
| δL |
Оставленный угол колеса |
| δR |
Правильный угол колеса |
| γ |
Регулирование отношения |
Type — Выберите держащийся типRack and pinion (значение по умолчанию) | Ackerman | ParallelЧтобы задать держащийся тип, используйте параметр Type.
| Установка | Блокируйте реализацию |
|---|---|
| Идеал Акерман, держащийся. Углы колеса имеют общий центр круга превращения. |
| Идеальное регулирование реечного механизма. Механизмы преобразуют держащееся вращение в линейное движение. |
| Параллельное регулирование. Углы колеса равны. |
Эта таблица суммирует Type и зависимости от параметра Parametrized by.
| Ввод | Параметрированный | Создает параметры |
|---|---|---|
|
| Constant |
Track width, TrckWdth Wheel base, WhlBase Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Track width, TrckWdth Wheel base, WhlBase Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl | |
|
|
|
Track width, TrckWdth Steering range, StrgRng Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadius |
|
|
Track width, TrckWdth Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadiusTbl | |
Parallel | Constant |
Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl |
Parametrized by — Выберите параметризациюLookup table (значение по умолчанию) | ConstantЧтобы задать тип данных для рулевого механизма, используйте параметр Parametrized by.
| Установка | Блокируйте реализацию |
|---|---|
| Рулевой механизм использует постоянные данные о параметре. |
| Рулевой механизм реализует таблицы для данных о параметре. |
Эта таблица суммирует Type и зависимости от параметра Parametrized by.
| Ввод | Параметрированный | Создает параметры |
|---|---|---|
|
| Constant |
Track width, TrckWdth Wheel base, WhlBase Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Track width, TrckWdth Wheel base, WhlBase Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl | |
|
|
|
Track width, TrckWdth Steering range, StrgRng Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadius |
|
|
Track width, TrckWdth Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadiusTbl | |
Parallel | Constant |
Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl |
Power assist — Укажите, что степень помогаетon (значение по умолчанию) | offЕсли вы выбираете Power assist, можно указать, что крутящий момент помогает интерполяционной таблице, ƒtrq, который является функцией скорости транспортного средства, v, и входного крутящего момента руля, τin.
Блок использует входной крутящий момент руля, и крутящий момент помогают вычислять держащуюся динамику.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Степень помогает | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Location — Выберите местоположениеИспользуйте параметр Location, чтобы задать переднее или заднее регулирование.
| Установка | Реализация |
|---|---|
| Front |
Переднее регулирование
|
| Rear |
Заднее регулирование
|
Track width, TrckWdth widthscalarШирина дорожки, TW, в m.
Чтобы создать этот параметр, установите Type на Ackerman или Rack and pinion.
Wheel base, WhlBase — ОсноваscalarОснова колеса, WB, в m.
Чтобы создать этот параметр, установите Type на Ackerman.
Steering range, StrgRng Область значений1.25*pi (значение по умолчанию) | scalarРегулирование области значений, в рад. Блок ограничивает углы колеса, чтобы остаться в держащейся области значений.
Steering ratio, StrgRatio — ОтношениеscalarРегулируя отношение, γ, безразмерный.
Создать этот параметр:
Установите Type на Ackerman или Parallel.
Установите Parametrized by на Constant.
Steering angle breakpoints, StrgAngBpts — Точки остановаvectorРегулирование угловых точек останова, в рад.
Чтобы создать этот параметр, установите Parametrized by на Lookup table.
Steering ratio table, StrgRatioTbl ТаблицаvectorРегулируя таблицу отношения, γ, безразмерный.
Создать этот параметр:
Установите Type на Ackerman или Parallel.
Установите Parametrized by на Lookup table.
Steering arm length, StrgArmLngth длинаscalarРегулируя длину руки, larm, в m.
Чтобы создать этот параметр, установите Type на Rack and pinion.
Rack casing length, RckCsLngth длинаscalarУстановите в стойку случающуюся длину, lrack, в m.
Чтобы создать этот параметр, установите Type на Rack and pinion.
Tie rod length, TieRodLngth длинаscalarСвяжите длину стержня, lrod, в m.
Чтобы создать этот параметр, установите Type на Rack and pinion.
Distance between front axis and rack, D — РасстояниеscalarРасстояние между передней осью и стойкой, D, в m.
Чтобы создать этот параметр, установите Type на Rack and pinion.
Pinion radius, PnnRadius — РадиусscalarСвяжите радиус, r, в m.
Создать этот параметр:
Установите Type на Rack and pinion.
Установите Parametrized by на Constant.
Pinion radius table, PnnRadiusTbl ТаблицаvectorСвяжите таблицу радиуса, r, в m.
Создать этот параметр:
Установите Type на Rack and pinion.
Установите Parametrized by на Lookup table.
Steering wheel inertia, J1 — ИнерцияscalarИнерция руля, J1, в kg*m^2.
Steering mechanism inertia, J2 — ИнерцияscalarИнерция рулевого механизма, J2, в kg*m^2.
Upper hysteresis modifier, beta_u — Верхний гистерезисный модификаторscalarВерхний гистерезисный модификатор, βu, безразмерный.
Lower hysteresis modifier, beta_l — Понизьте гистерезисный модификаторscalarПонизьте гистерезисный модификатор, βl, безразмерный.
Hysteresis viscous damping, b1 — ЗатуханиеscalarГистерезисное затухание, b1, в N · m·.
Hysteresis stiffness, k1 — ЖесткостьscalarГистерезисная жесткость, k1, в N · m/rad.
Steering wheel damping, b2 — ЗатуханиеscalarЗатухание руля, b2, в N · m·.
Steering mechanism damping, b3 — ЗатуханиеscalarЗатухание рулевого механизма, b3, в N · m·.
Initial steering angle, theta_o \anglescalarНачальный руководящий угол, θ0, в рад.
Initial steering angular velocity, omega_o — Скорость вращенияscalarНачальная руководящая скорость вращения, ωo, в rad/s.
Friction torque, FricTrq — Крутящий моментscalarМомент трения, τfric, в N · m.
Steering wheel torque breakpoints, TrqBpts — Точки останова1- M векторТочки останова крутящего момента руля, в N · m.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Степень помогает | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Vehicle speed breakpoints, VehSpdBpts — Точки останова1- N векторТочки останова скорости транспортного средства, в m/s.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Степень помогает | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Assisting torque table, TrqTbl — 2D таблица крутящего моментаM- N матрицаПомогая таблице крутящего момента, ƒtrq, в N · m.
Крутящий момент помогает, интерполяционная таблица является функцией скорости транспортного средства, v, и входного крутящего момента руля, τin.
Блок использует входной крутящий момент руля, и крутящий момент помогают вычислять держащуюся динамику.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Степень помогает | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Assisting torque limit, TrqLmt — Закрутите пределscalarПомощь пределу крутящего момента, в N · m.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Степень помогает | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Assisting power limit, PwrLmt — Предел степениscalarПомощь пределу степени, в N · m/s.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Степень помогает | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Assisting torque efficiency, Eta ЭффективностьscalarПомощь КПД крутящего момента, безразмерному.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Степень помогает | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
Cutoff frequency, omega_c — Частота срезаscalarЧастота среза, в rad/s.
Выбор Power assist создает VehSpd входной порт и эти параметры.
| Степень помогает | Параметры |
|---|---|
|
|
Steering wheel torque breakpoints, TrqBpts Vehicle speed breakpoints, VehSpdBpts Assisting torque table, TrqTbl Assisting torque limit, TrqLmt Assisting power limit, PwrLmt Assisting torque efficiency, Eta Cutoff frequency, omega_c |
[1] Crolla, Дэвид, Дэвид Фостер, и др. Энциклопедия Автомобильной Разработки. Объем 4, Часть 5 (Системы Шасси) и Часть 6 (Электрические и Электронные системы). Чичестер, Западный Сассекс, Соединенное Королевство: John Wiley & Sons Ltd, 2015.
[2] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, усилитель мощности (УМ): ассоциация инженеров автомобилестроения, 1992.
[3] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, усилитель мощности (УМ): ассоциация инженеров автомобилестроения, 2008.