Двойная независимая подвеска вилочки
Vehicle Dynamics Blockset / Приостановка
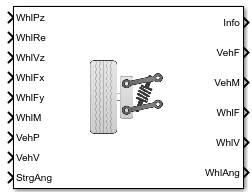
Блок Independent Suspension - Double Wishbone реализует независимую двойную приостановку вилочки для нескольких осей с несколькими дорожками на ось.
Блок моделирует податливость приостановки, затухание и геометрические эффекты как функции относительных положений и скорости транспортного средства и несущей колеса со специфичной для оси податливостью и затуханием параметров. Используя податливость приостановки и затухание, блок вычисляет силу приостановки на транспортное средство и колесо. Блок использует систему координат Z-down (заданный в SAE J670).
| Для каждого | Можно задать |
|---|---|
|
Ось |
|
|
Дорожка |
|
Блок содержит хранящие энергию пружинные элементы и рассеивающие энергию элементы демпфера. Это не содержит хранящие энергию массовые элементы. Блок принимает, что (перепрыгиваемое) транспортное средство и колесо (неперепрыгиваемые) блоки, соединенные с блоком, хранит связанную с массой энергию приостановки.
Эта таблица суммирует настройки параметров блоков для транспортного средства с:
Две оси
Две дорожки на ось
Регулирование угла вводится для обеих дорожек на передней оси
Панель антивлияния на передней оси
| Параметр | Установка |
|---|---|
| Number of axles, NumAxl | 2 |
Number of tracks by axle, NumTracksByAxl | [2 2] |
| Steered axle enable by axle, StrgEnByAxl | [1 0] |
| Anti-sway axle enable by axle, AntiSwayEnByAxl | [1 0] |
Блок использует линейную пружину и демпфер, чтобы смоделировать вертикальные динамические эффекты системы подвески. Используя относительные положения и скорости транспортного средства и несущей колеса, блок вычисляет вертикальные силы приостановки на колесо и транспортное средство. Блок использует линейное уравнение, которое связывает вертикальное затухание и податливость к высоте приостановки, скорости изменения высоты приостановки и абсолютному значению держащихся углов.
Блок реализует это уравнение.
Коэффициент демпфирования, c, зависит от установки параметра Enable active damping.
Установка Enable active damping | Затухание |
|---|---|
off | Постоянный, c = cza |
on | Интерполяционная таблица, которая является функцией активного рабочего цикла демпфера и скорости привода |
Блок принимает, что элементы приостановки не имеют никакой массы. Поэтому силы приостановки и моменты обратились к транспортному средству, равны силам приостановки, и моменты применились к колесу.
Блок устанавливает положения колеса и скорости, равные транспортному средству боковые и продольные положения и скорости.
Уравнения используют эти переменные.
| Fwza,t, Mwza,t | Сила приостановки и момент применилась к колесу на оси |
| Fwxa,t, Mwxa,t | Сила приостановки и момент применилась к колесу на оси |
| Fwya,t, Mwya,t | Сила приостановки и момент применилась к колесу на оси |
| Fvza,t, Mvza,t | Сила приостановки и момент применилась к транспортному средству на оси |
| Fvxa,t, Mvxa,t | Сила приостановки и момент применилась к транспортному средству на оси |
| Fvya,t, Mvya,t | Сила приостановки и момент применилась к транспортному средству на оси |
| Fz0a | Вертикальное усилие предварительной нагрузки пружины подвески применилось к колесам на оси |
| kza | Вертикальный коэффициент упругости применился к дорожкам на оси |
| mhsteera | Регулирование угла к вертикальному наклону силы, примененному в несущей колеса для дорожек на оси |
| δsteera,t | Регулирование углового входа для оси |
| cza | Вертикальное постоянное затухание применилось к дорожкам на оси |
| Rewa,t | Эффективный радиус колеса для оси |
| Fzhstopa,t | Вертикальные hardstop обеспечивают в оси |
| Fzaswya,t | Вертикальная сила антивлияния в оси |
| zva,t, żva,t | Смещение транспортного средства и скорость в оси |
| zwa,t, żwa,t | Отследите смещение и скорость в оси |
| xva,t, ẋva,t | Смещение транспортного средства и скорость в оси |
| xwa,t, ẋwa,t | Отследите смещение и скорость в оси |
| yva,t, ẏva,t | Смещение транспортного средства и скорость в оси |
| ywa,t, ẏwa,t | Отследите смещение и скорость в оси |
| Ha,t | Высота приостановки в оси |
| Rewa,t | Эффективный радиус колеса в оси a, отследите t |
hardstop сила обратной связи, Fzhstopa,t, что блок применяется, зависят от того, сжимает ли приостановка или расширяет. Блок прикладывает силу:
В сжатии, когда приостановка сжата больше, чем максимальное расстояние, заданное параметром Suspension maximum height, Hmax.
В расширении, когда расширение приостановки больше максимального расширения, заданного параметром Suspension maximum height, Hmax.
Чтобы вычислить силу, блок использует жесткость на основе гиперболической касательной и экспоненциального масштабирования.
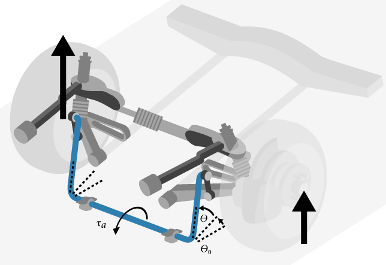
Опционально, блок реализует силу панели антивлияния, Fzaswya,t, для осей, которые имеют две дорожки. Этот рисунок показывает, как панель антивлияния передает крутящий момент между двумя дорожками независимой подвески на разделяемой оси. Каждая независимая подвеска применяет крутящий момент к панели антивлияния через руку радиуса, которая расширяет от панели антивлияния назад к точке контакта независимой подвески.
Чтобы вычислить силу панели влияния, блок реализует эти уравнения.
| Вычисление | Уравнение |
|---|---|
|
Антипоколеблите панель угловое отклонение для данной оси и дорожки, Δϴa,t |
|
|
Антипоколеблите угол скручивания панели, ϴa |
|
|
Антипоколеблите крутящий момент панели, τa |
|
|
Антиколеблитесь силы панели обратились к колесу на оси |
|
Уравнения и фигура используют эти переменные.
| τa |
Антипоколеблите крутящий момент панели |
| θ |
Антипоколеблите угол скручивания панели |
| θ0a |
Начальная панель антивлияния скручивает угол |
| Δϴa,t | Антипоколеблите панель угловое отклонение в оси a, отследите t |
| r | Антипоколеблите радиус руки панели |
| z0 | Вертикальное расстояние от точки контакта панели антивлияния, чтобы антипоколебать среднюю линию панели |
| Fzswaya,t |
Антиколеблитесь сила панели применилась к колесу на оси |
| zva,t |
Смещение транспортного средства в оси |
| zwa,t |
Смещение колеса в оси |
Чтобы вычислить изгиб, литейщика и углы пальца ноги, блок использует линейные функции высоты приостановки и держащегося угла.
Уравнения используют эти переменные.
| ξa,t |
Угол изгиба колеса на оси |
| ηa,t |
Угол литейщика колеса на оси |
| ζa,t |
Угол пальца ноги колеса на оси |
| ξ0a, η0a, ζ0a |
Номинальная ось приостановки изгиб, литейщик и углы пальца ноги, соответственно, под нулевым руководящим углом |
| mhcambera, mhcastera, mhtoea |
Изгиб, литейщик и углы пальца ноги, соответственно, по сравнению с высотой приостановки клонятся для оси |
| mcambersteera, mcastersteera, mtoesteera |
Изгиб, литейщик и углы пальца ноги, соответственно, по сравнению с держащимся углом клонятся для оси |
| mhsteera |
Регулирование угла по сравнению с вертикальной силой клонится для оси |
| δsteera,t |
Регулирование углового входа для оси |
| zva,t |
Смещение транспортного средства в оси |
| zwa,t |
Отследите смещение в оси |
Опционально, можно ввести держащиеся углы для дорожек. Чтобы вычислить держащиеся углы для колес, блок возмещает входные руководящие углы с линейной функцией высоты приостановки.
Уравнение использует эти переменные.
| mtoesteera |
Ось |
| mhsteera |
Ось |
| mhtoea |
Ось |
| δwhlsteera,t |
Руководящий угол колеса для оси |
| δsteera,t |
Регулирование углового входа для оси |
| zva,t |
Смещение транспортного средства в оси |
| zwa,t |
Отследите смещение в оси |
Блок вычисляет эти характеристики приостановки для каждой оси, a, дорожка, t.
| Вычисление | Уравнение |
|---|---|
Рассеянная степень, Psuspa,t |
|
Поглощенная энергия, Esuspa,t |
|
Высота приостановки, Ha,t |
|
Расстояние от несущей колеса сосредотачивается к интерфейсу шины/дороги |
|
Уравнения используют эти переменные.
| mhsteera | Регулирование угла к вертикальному наклону силы, примененному в несущей колеса для дорожек на оси |
| δsteera,t | Регулирование углового входа для оси |
| Rewa,t | Ось |
| Fz0a | Вертикальное усилие предварительной нагрузки пружины подвески применилось к колесам на оси |
| zwtra,t | Расстояние от несущей колеса сосредотачивается к интерфейсу шины/дороги вдоль зафиксированной транспортным средством оси z |
| zva,t, żva,t | Смещение транспортного средства и скорость в оси |
| zwa,t, żwa,t | Отследите смещение и скорость в оси |
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, усилитель мощности (УМ): ассоциация инженеров автомобилестроения, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, усилитель мощности (УМ): ассоциация инженеров автомобилестроения, 2008.
[3] Технический Комитет. Дорожные транспортные средства — Динамика аппарата и способность устойчивости движения — Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011.
Independent Suspension - MacPherson | Independent Suspension - Mapped
