Обнаружьте шаблон шахматной доски в изображении
[ обнаруживает черно-белую шахматную доску размера, больше, чем квадраты 4 на 4 в 2D истинном цвете или полутоновом изображении. Функция возвращает обнаруженные точки и размерности шахматной доски.imagePoints,boardSize]
= detectCheckerboardPoints(I)
[ обнаруживает шаблон шахматной доски в наборе входных изображений, обеспеченных как массив имен файлов.imagePoints,boardSize,imagesUsed]
= detectCheckerboardPoints(imageFileNames)
[ обнаруживает шаблон шахматной доски в наборе входных изображений, обеспеченных как массив черно-белых или цветных изображений.imagePoints,boardSize,imagesUsed]
= detectCheckerboardPoints(images)
[ обнаруживает шаблон шахматной доски в стереопарах изображений, обеспеченных как массивы ячеек имен файлов.imagePoints,boardSize,pairsUsed]
= detectCheckerboardPoints(imageFileNames1,imageFileNames2)
[ обнаруживает шаблон шахматной доски в стереопарах изображений, обеспеченных как массивы черно-белых или цветных изображений.imagePoints,boardSize,pairsUsed]
= detectCheckerboardPoints(images1,images2)
[ дополнительные опции использования заданы одним или несколькими imagePoints,boardSize,pairsUsed]
= detectCheckerboardPoints(___,Name,Value)Name,Value парные аргументы. Незаданные свойства имеют значения по умолчанию.
Создайте imageDatastore содержание калибровки отображает от камеры GoPro.
imds = imageDatastore(fullfile(toolboxdir('vision'),'visiondata','calibration','gopro'));
Обнаружьте калибровочный шаблон с помощью 'HighDistortion' опция, которую хорошо использовать с изображениями линзы подозрительного взгляда.
[imagePoints,boardSize,imagesUsed] = detectCheckerboardPoints(imds.Files(1:4),'HighDistortion',true);Отобразите обнаруженные точки.
for i = 1:4 % Read image I = readimage(imds, i); % Insert markers at detected point locations I = insertMarker(I, imagePoints(:,:,i), 'o', 'Color', 'red', 'Size', 10); % Display image subplot(2, 2, i); imshow(I); end

Загрузите изображение, содержащее шаблон шахматной доски.
imageFileName = fullfile(toolboxdir('vision'),'visiondata','calibration','webcam','image4.tif'); I = imread(imageFileName);
Обнаружьте точки шахматной доски.
[imagePoints,boardSize] = detectCheckerboardPoints(I);
Отобразите обнаруженные точки.
J = insertText(I,imagePoints,1:size(imagePoints,1)); J = insertMarker(J,imagePoints,'o','Color','red','Size',5); imshow(J); title(sprintf('Detected a %d x %d Checkerboard',boardSize));

Создайте массив ячеек имен файлов калибровочных изображений.
for i = 1:5 imageFileName = sprintf('image%d.tif', i); imageFileNames{i} = fullfile(matlabroot,'toolbox','vision',... 'visiondata','calibration','webcam',imageFileName); end
Обнаружьте калибровочный шаблон в изображениях.
[imagePoints,boardSize,imagesUsed] = detectCheckerboardPoints(imageFileNames, 'PartialDetections', false);Отобразите обнаруженные точки.
imageFileNames = imageFileNames(imagesUsed); for i = 1:numel(imageFileNames) I = imread(imageFileNames{i}); subplot(2, 2, i); imshow(I); hold on; plot(imagePoints(:,1,i),imagePoints(:,2,i),'ro'); end

Читайте в стереоизображениях.
numImages = 4; images1 = cell(1, numImages); images2 = cell(1, numImages); for i = 1:numImages images1{i} = fullfile(matlabroot,'toolbox','vision',... 'visiondata','calibration','stereo','left',sprintf('left%02d.png',i)); images2{i} = fullfile(matlabroot,'toolbox','vision',... 'visiondata','calibration','stereo','right',sprintf('right%02d.png',i)); end
Обнаружьте шахматные доски в изображениях.
[imagePoints,boardSize,pairsUsed] = ...
detectCheckerboardPoints(images1,images2);Отобразите точки от images1.
images1 = images1(pairsUsed); figure; for i = 1:numel(images1) I = imread(images1{i}); subplot(2,2,i); imshow(I); hold on; plot(imagePoints(:,1,i,1),imagePoints(:,2,i,1),'ro'); end annotation('textbox',[0 0.9 1 0.1],'String','Camera 1',... 'EdgeColor','none','HorizontalAlignment','center')

Отобразите точки от images2.
images2 = images2(pairsUsed); figure; for i = 1:numel(images2) I = imread(images2{i}); subplot(2, 2, i); imshow(I); hold on; plot(imagePoints(:,1,i,2),imagePoints(:,2,i,2),'ro'); end annotation('textbox',[0 0.9 1 0.1],'String','Camera 2',... 'EdgeColor','none','HorizontalAlignment','center')

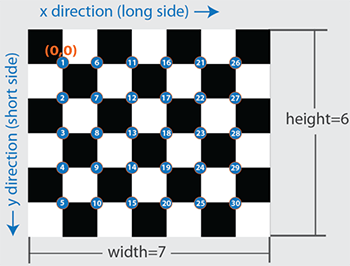
imagePoints — Обнаруженные угловые координаты шахматной доскиОбнаруженные угловые координаты шахматной доски, возвращенные как M-by-2 матрица для одного изображения. Для повторных изображений точки возвращены как M-by-2-by-number of images массив, и для стереопар изображений, функция возвращает точки как M-by-2-by-number of pairs-by-number of cameras массив.
Для стереопар, imagePoints(::: 1) точки от первого набора изображений и imagePoints(::: 2) точки от второго набора изображений. Выход содержит количество M [x
y] координаты. Каждая координата представляет точку, где прямые углы обнаруживаются на шахматной доске. Число точек, которое возвращает функция, зависит от значения boardSize, который указывает на количество обнаруженных квадратов. Функция обнаруживает точки с субпиксельной точностью.
Функция вычисляет число точек, M, можно следующим образом:
M = prod(boardSize-1). |
imagePoints = [] |
boardSize= [0,0] |
Когда вы задаете imageFileNames введите, функция может возвратить imagePoints как M-by-2-by-N массив. В этом массиве N представляет количество изображений, в которых обнаруживается шахматная доска. Если шахматная доска не может быть обнаружена, функция устанавливает imagePoints к [].
Поскольку одна камера отображает только:
Если полная шахматная доска не может быть обнаружена, функция возвращает частично обнаруженную шахматную доску с [NaN,NaN] как x-y координирует для недостающих углов в imagePoints. Это поведение по умолчанию может быть изменено с помощью 'PartialDetections' аргумент значения имени.
Когда возможно, функция ориентирует частично обнаруженную шахматную доску, таким образом, что местоположение источника и расположение углов сопоставимы с абсолютно видимой шахматной доской. Если функция не может обнаружить полную шахматную доску ни в одном из входных изображений, самая большая обнаруженная шахматная доска используется в качестве ссылочной шахматной доски.
boardSize — Размерности шахматной доскиРазмерности шахматной доски, возвращенные как с 2 элементами [height, width] вектор. Размерности шахматной доски описываются в терминах количества квадратов.
Если шахматная доска не может быть обнаружена, функция устанавливает boardSize к [0,0].
imagesUsed — Флаг обнаружения шаблонаФлаг обнаружения шаблона, возвращенный как N-by-1 логический вектор из N logicals. Функциональные выходные параметры то же количество logicals как там вводятся изображения. true значение указывает, что шаблон был обнаружен в соответствующем изображении. false значение указывает, что функция не обнаружила шаблон.
pairsUsed — Флаг обнаружения шаблона стереопарыФлаг обнаружения шаблона стереопары, возвращенный как N-by-1 логический вектор из N logicals. Функциональные выходные параметры то же количество logicals как там вводятся изображения. true значение указывает, что шаблон обнаруживается в соответствующей паре стереоизображения. false значение указывает, что функция не обнаруживает шаблон.
Для обнаружения шаблона стереопары шахматная доска должна полностью отобразиться в обоих изображениях для него, чтобы быть обнаруженной. В отличие от одной калибровки фотоаппарата, частично обнаруженные шахматные доски отклоняются для пар стереоизображения.
[1] Гайгер, A., Ф. Моосманн, O. Автомобиль и Б. Шустер. "Автоматическая Калибровка Датчика Камеры и Области значений с помощью Одного Выстрела", Международная конференция по вопросам Робототехники и Автоматизации (ICRA), Св. Павла, США, май 2012.
estimateCameraParameters | generateCheckerboardPoints | cameraParameters | stereoParameters | Camera Calibrator
