Вычислите среднее значение, отклонение и стандартное отклонение
Vision HDL Toolbox / Статистика
Блок Image Statistics вычисляет среднее значение, отклонение и стандартное отклонение данных о потоковом видео. Каждое вычисление выполняется по всем пикселям во входной видимой области (ROI). Блок реализует вычисления при помощи эффективных оборудованием алгоритмов.
Этот блок использует пиксельный интерфейс потоковой передачи с шиной для сигналов управления кадром. Этот интерфейс позволяет блоку действовать независимо от размера изображения и формата. Все блоки Vision HDL Toolbox™ используют тот же интерфейс потоковой передачи. Блок принимает скалярное пиксельное значение и шину, которая содержит пять управляющих сигналов. Управляющие сигналы указывают на валидность каждого пикселя и его местоположения в системе координат. Чтобы преобразовать систему координат (пиксельная матрица) в пиксельный поток и управляющие сигналы, используйте блок Frame To Pixels. Для полного описания интерфейса смотрите Пиксельный Интерфейс Потоковой передачи.
Чтобы изменить размер и размерности ROI, можно управлять входными управляющими сигналами видеопотока. Смотрите необходимые области.
Количество допустимых пикселей во входном изображении влияет на точность среднего приближения. Чтобы избежать ошибки приближения, используйте изображение, которое содержит кратное 64n пиксели, до 64n+1 пиксели, где n равняется 0, 1, 2, или 3. Для получения дополнительной информации среднего приближения, см. Алгоритм.
Блок вычисляет статистику по системам координат до 644 (16, 777, 216) пиксели в размере. Этот размер поддерживает системы координат HD.
Вычисления среднего значения, отклонения и стандартного отклонения создают друг от друга. Для аппаратного КПД логика вычисления совместно используется как показано.
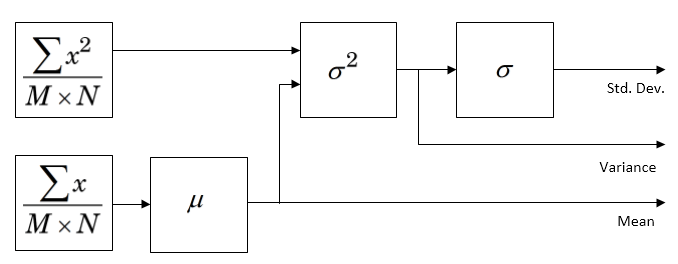
Уравнение, чтобы вычислить точное среднее пиксельное значение требует больших внутренних размеров слова и дорогой логики деления.
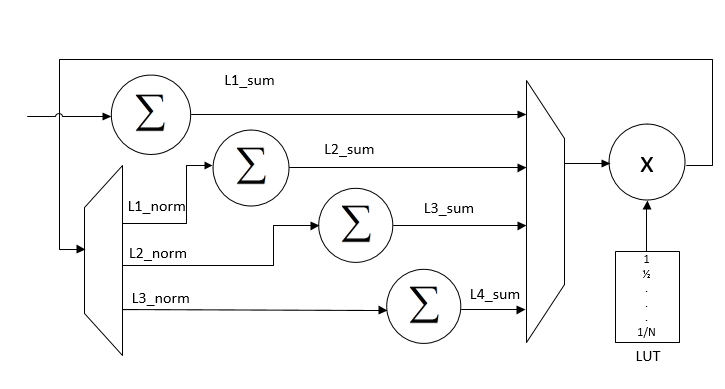
Вместо того, чтобы использовать это уравнение, блок вычисляет среднее значение серией четырех аккумуляторов, которые вычисляют среднее значение сегмента пикселей. Во-первых, блок находит сумму окна 64 пикселей и нормирует.
Затем это накапливает 64 из предыдущих окон и нормирует.
Третий аккумулятор суммирует 64 из 64×64 окна и нормирует тот же путь.
Четвертый аккумулятор суммирует 64 из 64×64×64 окна и нормирует.
Каждый допустимый пиксель накапливается, когда он прибывает. Его местоположение в линии или системе координат не влияет на логику накопления.
Когда vEnd получен, блок продвигает любые остающиеся данные на четырех уровнях среднего вычисления, чтобы вычислить окончательный результат. Если счетчик аккумулятора не в 64 когда vEnd прибывает, тот уровень нормирует на фактическое значение счетчика. Константы для этого умножения хранятся в интерполяционной таблице (LUT). Эти четыре аккумулятора совместно используют один LUT и множитель. Значения в LUT находятся в ufix18_en17 тип данных так, чтобы множитель поместился в блок DSP на FPGA.
Этот метод среднего вычисления точен, когда количество пикселей в системе координат выравнивает vEnd с итоговой трансформацией аккумулятора. Это выравнивание происходит на уровне 2, когда система координат содержит кратное 64 пикселей и меньше чем 642(4096) пиксели. Происходит на уровне 3, когда система координат содержит кратное 4 096 пикселей. Происходит на уровне 4, когда система координат содержит кратное 643 'pixels'. Этот метод также точен, когда система координат имеет меньше чем 64 пикселя, потому что только первый аккумулятор необходим.
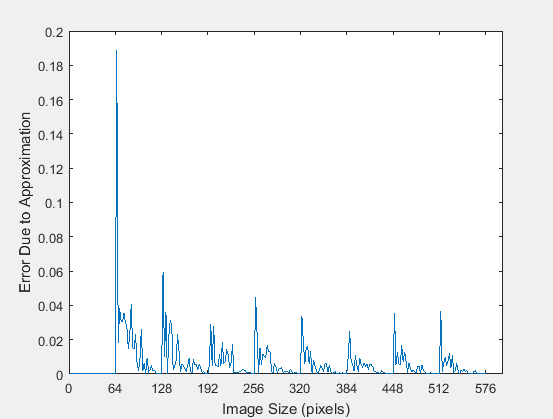
Однако, когда количество пикселей в системе координат не соответствует этим условиям, блок должен нормировать итоговое накопление, прежде чем счетчик достигнет 64. Эта нормализация вводит ошибку в вычислении на последующих уровнях. Рисунок показывает ошибку нормализации, введенную в среднем вычислении размерами изображения менее чем 4 096 пикселей. Скачки происходят, где размер изображения только по кратному 64 пикселей.
Для изображений, больше, чем 4 096 пикселей, тот же эффект происходит во множителях 4 096 пикселей, и во множителях 643 'pixels'.
Блок вычисляет отклонение входных пикселей при помощи этого уравнения:
Среднее значение и среднее значение входа в квадрате вычисляются параллельно. Блок вычисляет, среднее значение квадратов с помощью того же метода приближения раньше вычисляло среднее значение, как описано в предыдущем разделе.
Блок вычисляет квадратный корень из отклонения при помощи конвейерного битного набора и алгоритма проверки. Этот алгоритм вычисляет квадратный корень при помощи сложения и сдвигов, а не множителей. Для N битный вход результат имеет биты N точности.
Этот метод является оборудованием, эффективным для общих входных параметров. Если ваши данные знали характеристики, которые допускают более эффективную реализацию квадратного корня, можно отключить вычисление в этом блоке и создать собственную логику из поддержанных HDL блоков.
2-D Mean (Computer Vision Toolbox) | 2-D Variance (Computer Vision Toolbox) | 2-D Standard Deviation (Computer Vision Toolbox) | Frame To Pixels | visionhdl.ImageStatistics
