Контроллер управления энергопотреблением для гибридных электромобилей P0–P4
Powertrain Blockset / Движение / Контрольные Контроллеры
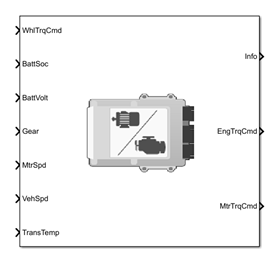
Используйте блок Equivalent Consumption Minimization Strategy (ECMS), чтобы управлять управлением энергопотреблением гибридными электромобилями (HEVs). Блок оптимизирует крутящий момент между ДВС и мотором, чтобы минимизировать потребление энергии при поддержании состояния заряда (SOC) батареи.
HEV P0, P1, P2, P3 и примеры готовых узлов P4 используют блок Equivalent Consumption Minimization Strategy для гибридного управления.
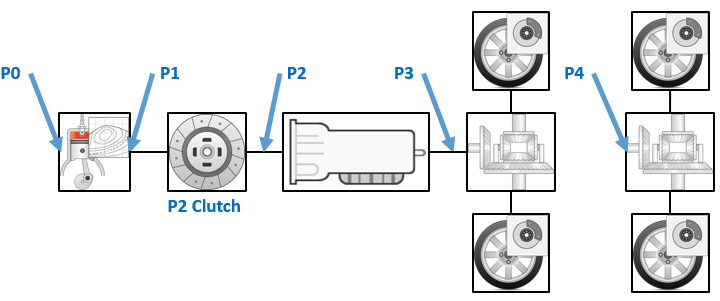
Используйте параметр Motor location, чтобы задать моторное местоположение HEV.
Используйте параметр ECMS method, чтобы реализовать или адаптивный или неадаптивный метод ECMS. Архитектуры HEV являются поддержкой заряда, означая, что SOC батарея должна остаться в заданной области, потому что нет никакой сменной возможности перезарядить батарею. Батарея является энергетическим буфером, и вся энергия прибывает из топлива, если изменение в SOC минимизировано по ездовому циклу. Чтобы выдержать заряд по заданному ездовому циклу, блок реализует любой из этих методов ECMS.
| Метод ECMS | Описание |
|---|---|
| Блок использует постоянный эквивалентный фактор ECMS.
|
| Блок настраивает эквивалентный фактор ECMS при помощи выхода ПИ-контроллера.
|
Блок реализует динамический контрольный контроллер, который определяет крутящий момент механизма, крутящий момент двигателя, команды стартера, сцепления и тормозного давления. А именно, блок:
Преобразует сигнал педали акселератора водителя в запрос крутящего момента колеса. Чтобы вычислить общий крутящий момент трансмиссии в колесах, алгоритм использует максимальный крутящий момент механизма и кривые крутящего момента двигателя и передаточные числа трансмиссии и дифференциала.
Преобразует сигнал педали тормоза драйвера в запрос тормозного давления. Алгоритм умножает сигнал педали тормоза на максимальное тормозное давление.
Реализует регенеративный алгоритм торможения для тягового мотора, чтобы восстановить максимальную сумму кинетической энергии от транспортного средства.
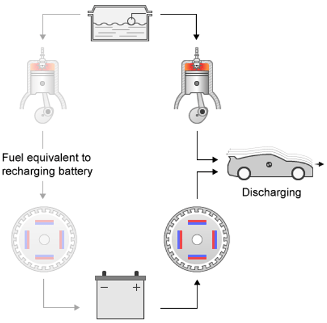
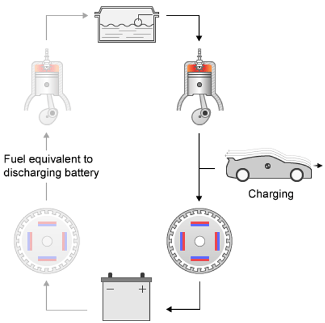
Блок реализует алгоритм ECMS[2] это оптимизирует крутящий момент между ДВС и мотором, чтобы минимизировать потребление энергии при поддержании SOC батареи. А именно, ECMS:
Привязывает стоимость к электроэнергии, так что использование сохраненной электроэнергии равно потреблению топливной энергии.
| Режим работы от аккумулятора | Эквивалентная электроэнергия | Описание |
|---|---|---|
Разряд | Положительный | Батарея разряжает сохраненную электроэнергию, когда электрическая машина используется.
|
Зарядка | Отрицательный | Батарея аккумулирует электроэнергию от любого:
|
Это мгновенный метод минимизации, который программное обеспечение решает на каждом временном шаге контроллера. Чтобы реализовать стратегию, ECMS выбирает оптимальный крутящий момент двигателя и механизма в стратегии оптимизации, чтобы минимизировать эквивалентное потребление энергии.
Реализует адаптивный или неадаптивный метод ECMS.
Motor location — Местоположение двигателяP0 (значение по умолчанию) | P1 | P2 | P3 | P4Задайте моторное местоположение HEV.
ECMS method — Метод ECMSNon-adaptive (значение по умолчанию) | AdaptiveИспользуйте параметр ECMS method, чтобы реализовать или адаптивный или неадаптивный метод ECMS. Архитектуры HEV являются поддержкой заряда, означая, что SOC батарея должна остаться в заданной области, потому что нет никакой сменной возможности перезарядить батарею. Батарея является энергетическим буфером, и вся энергия прибывает из топлива, если изменение в SOC минимизировано по ездовому циклу. Чтобы выдержать заряд по заданному ездовому циклу, блок реализует любой из этих методов ECMS.
| Метод ECMS | Описание |
|---|---|
| Блок использует постоянный эквивалентный фактор ECMS.
|
| Блок настраивает эквивалентный фактор ECMS при помощи выхода ПИ-контроллера.
|
Differential gear ratio, N_diff — Отношение дифференциалаscalarОтношение дифференциала. Никакая размерность.
Типы данных: double
Differential efficiency factor, eta_diff — Дифференциальный коэффициент полезного действияscalarДифференциальный коэффициент полезного действия. Никакая размерность.
Типы данных: double
Loaded wheel radius, Re — Загруженный радиус колесаscalarЗагруженный радиус колеса, в m.
Типы данных: double
Transmission efficiency factors — Коэффициенты полезного действия передачиGear, input torque, input speed, and temperature (значение по умолчанию) | Gear onlyКоэффициенты полезного действия передачи.
Типы данных: double
Transmission gear number vector, G_trans — Вектор номера механизма передачиvectorВектор номера механизма передачи. Никакая размерность.
Типы данных: double
Transmission gear ratio vector, N_trans — Вектор передаточного отношения передачиvectorВектор передаточного отношения передачи. Никакая размерность.
Типы данных: double
Transmission efficiency vector, eta_trans — Вектор КПД передачиvectorВектор КПД передачи. Никакая размерность.
Чтобы включить этот параметр, установите Transmission efficiency factors на Gear only.
Типы данных: double
Transmission efficiency torque breakpoints, Trq_trans_bpts — Контрольные точки крутящего момента КПД передачиvectorКонтрольные точки крутящего момента КПД передачи, в N · m.
Чтобы включить этот параметр, установите Transmission efficiency factors на Gear, input torque, input speed, and temperature.
Типы данных: double
Transmission efficiency speed breakpoints, omega_trans_bpts — Точки останова скорости КПД передачиvectorТочки останова скорости КПД передачи, в rad/s.
Чтобы включить этот параметр, установите Transmission efficiency factors на Gear, input torque, input speed, and temperature.
Типы данных: double
Transmission efficiency temperature breakpoints, Temp_trans_bpts — Точки останова температуры КПД передачиvectorТочки останова температуры КПД передачи, в K.
Чтобы включить этот параметр, установите Transmission efficiency factors на Gear, input torque, input speed, and temperature.
Типы данных: double
Transmission efficiency vector, eta_trans_tbl — Вектор КПД передачиarrayВектор КПД передачи. Никакая размерность.
Чтобы включить этот параметр, установите Transmission efficiency factors на Gear, input torque, input speed, and temperature.
Типы данных: double
Speed breakpoints, f_tbrake_n_bpt — Точки останова скоростиvectorТочки останова скорости, в об/мин.
Типы данных: double
Commanded torque breakpoints, f_tbrake_t_bpt — Точки останова крутящего момента, которыми управляют,vectorТочки останова крутящего момента, которыми управляют, в N · m.
Типы данных: double
Brake torque map, f_tbrake — Карта момента приводаarrayКарта момента привода, в N · m.
Типы данных: double
Minimum engine torque command table, f_tbrake_min — Минимальная таблица команды крутящего момента механизмаvectorМинимальная таблица команды крутящего момента механизма, в N · m.
Типы данных: double
Fuel flow map, f_fuel — Топливная блок-схемаarrayТопливная блок-схема, в kg/s.
Типы данных: double
Minimum engine torque command, HEVEngTrq_min — Минимальная команда крутящего момента механизмаscalarМинимальная команда крутящего момента механизма, в N · m.
Типы данных: double
Fuel lower heating value, LHV — Топливо более низкая теплота сгоранияscalarТопливо более низкая теплота сгорания, в J/kg.
Типы данных: double
Engine idle speed, N_idle — Скорость холостого хода EnginescalarСкорость холостого хода Engine, в об/мин.
Типы данных: double
Battery state-of-charge breakpoints, SOC_bpt — Точки останова состояния заряда батареиvectorТочки останова состояния заряда батареи. Никакая размерность.
Типы данных: double
Battery charge limit table, ChrgLmt — Предельная таблица заряда батареиvectorПредельная таблица заряда батареи. Никакая размерность.
Типы данных: double
Battery discharge limit table, DischrgLmt — Выброс батареи ограничивает таблицуvectorВыброс батареи ограничивает таблицу. Никакая размерность.
Типы данных: double
Maximum battery current, BattCurrMax — Максимальная текущая батареяscalarМаксимальная текущая батарея, в A.
Типы данных: double
DC/DC converter efficiency, eta_dcdc — КПД конвертера DC/DCscalarКПД конвертера DC/DC. Никакая размерность.
Типы данных: double
Maximum battery charge power, BattChrgPwrMax — Максимальная степень заряда батареиscalarМаксимальная степень заряда батареи, в W.
Типы данных: double
Maximum battery discharge power, BattDischrgPwrMax — Максимальная степень выброса батареиscalarМаксимальная степень выброса батареи, в W.
Типы данных: double
Motor maximum torque table, f_tmtr_max — Таблица максимального крутящего момента мотораvectorТаблица максимального крутящего момента мотора, в N · m.
Типы данных: double
Motor speed breakpoints, f_mtr_w_bpt — Точки останова частоты вращения двигателяvectorТочки останова частоты вращения двигателя, в об/мин.
Типы данных: double
Motor torque breakpoints, f_mtr_t_bpt — Точки останова крутящего момента двигателяvectorТочки останова крутящего момента двигателя, в N · m.
Типы данных: double
Motor efficiency map, f_mtr_eta — Моторная карта КПДarrayМоторная карта КПД. Никакая размерность.
Типы данных: double
Number of motor torque calculation points, Ngrid — Количество точек вычисления крутящего момента двигателяscalarКоличество точек вычисления крутящего момента двигателя. Никакая размерность.
Типы данных: double
P0 belt ratio, N_P0 — Отношение пояса P0scalarОтношение пояса P0. Никакая размерность.
Чтобы включить этот параметр, установите Motor location на P0.
Типы данных: double
ECMS weighting factor, ECMS_s — ECMS весовой коэффициентscalarECMS весовой коэффициент. Никакая размерность.
Типы данных: double
Penalty factor power, PenaltyFctrPwr — Степень фактора штрафаscalarСтепень фактора штрафа. Никакая размерность.
Типы данных: double
Adaptive ECMS proportional gain, ECMS_Kp — Адаптивная пропорциональная составляющая ECMSscalarАдаптивная пропорциональная составляющая ECMS. Никакая размерность.
Чтобы включить этот параметр, установите ECMS method на Adaptive.
Типы данных: double
Adaptive ECMS integral gain, ECMS_Ki — Адаптивная интегральная составляющая ECMSscalarАдаптивная интегральная составляющая ECMS. Никакая размерность.
Чтобы включить этот параметр, установите ECMS method на Adaptive.
Типы данных: double
Constraint penalty factor, PenaltyFctr — Ограничительный фактор штрафаscalarОграничительный фактор штрафа. Никакая размерность.
Типы данных: double
Target battery state-of-charge, SOCTrgt — Целевое состояние заряда батареиscalarЦелевое состояние заряда батареи. Никакая размерность.
Типы данных: double
Minimum battery state-of-charge, SOCmin — Минимальное состояние заряда батареиscalarМинимальное состояние заряда батареи. Никакая размерность.
Типы данных: double
Maximum battery state-of-charge, SOCmax — Максимальное состояние заряда батареиscalarМаксимальное состояние заряда батареи. Никакая размерность.
Типы данных: double
MathWorks® хотел бы подтвердить вклад доктора Симоны Онори к алгоритму оптимального управления ECMS, реализованному в этом блоке. Доктор Онори является профессором Разработки Энергетических ресурсов в Стэнфордском университете. Ее исследовательские интересы включают электрохимическое моделирование, оценку и оптимизацию устройств аккумулирования энергии для автомобильного и приложений уровня сети, гибридных автомобилей и моделирования электромобилей и управления, моделирования методом конечных элементов, и сокращения порядка модели и оценки систем смягчения эмиссии. Она - старший член IEEE®.
[1] Balazs, A., Morra, E. и Pischinger, S., оптимизация наэлектризованных трансмиссий для городских автомобилей. Технический документ 2011-01-2451 SAE. Варрендэйл, усилитель мощности (УМ): международный журнал SAE альтернативных трансмиссий, 2012.
[2] Onori, S., Serrao, L. и Rizzoni, G., гибридные системы управления энергопотреблением электромобилями. Нью-Йорк: Спрингер, 2016.