Диаграмма нулей и полюсов динамической системы
pzmap( создает диаграмму нулей и полюсов модели
sys)sys динамической системы непрерывного или дискретного времениX и o указывает на полюса и нули соответственно, как показано в следующем рисунке.
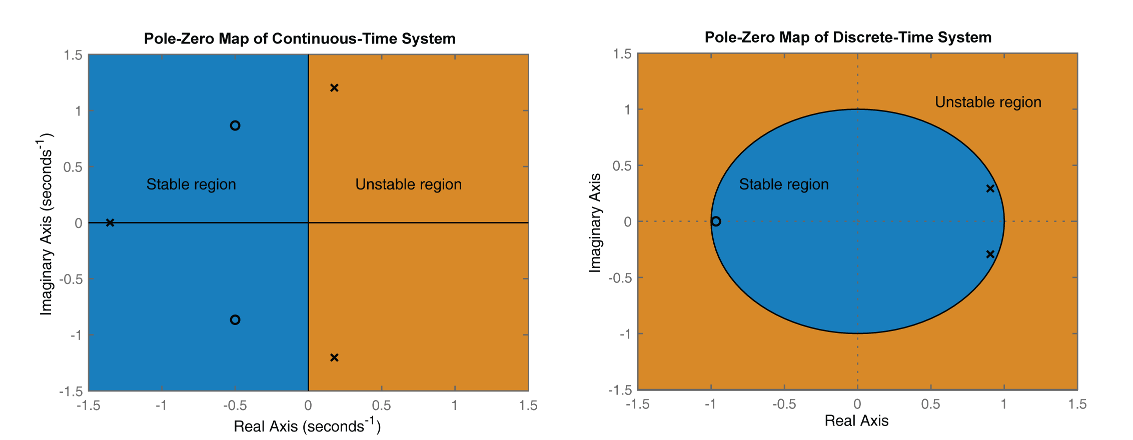
От фигуры выше, разомкнутый контур линейная независимая от времени система устойчива если:
В непрерывное время все полюса на комплексной s-плоскости должны быть в левой полуплоскости (синяя область), чтобы гарантировать устойчивость. Система незначительно устойчива, если отличные полюса лежат на мнимой оси, то есть, действительные части полюсов являются нулем.
В дискретное время все полюса в комплексной z-плоскости должны лечь в модульном кругу (синяя область). Система незначительно устойчива, если она имеет один или несколько полюсов, лежащих на модульном круге.
pzmap( создает диаграмму нулей и полюсов многоуровневых моделей на одной фигуре. Модели могут иметь различные количества вводов и выводов и могут быть соединением непрерывных и дискретных систем. Для систем SISO, sys1,sys2,...,sysN)pzmap строит системные полюса и нули. Для систем MIMO, pzmap строит системные полюса и нули передачи.
Постройте полюса и нули системы непрерывного времени, представленной следующей передаточной функцией:
H = tf([2 5 1],[1 3 5]);
pzmap(H)
grid on
Включение сетки отображает линии постоянного коэффициента затухания (дзэта) и линии постоянной собственной частоты (wn). Эта система имеет два действительных нуля, отмеченные o на графике. Система также имеет пару комплексных полюсов, отмеченных x.
Постройте нулевую полюсом карту идентифицированного пространства состояний дискретного времени (idss) модель. На практике можно получить idss модель по оценке на основе измерений ввода - вывода системы. В данном примере создайте один из данных пространства состояний.
A = [0.1 0; 0.2 -0.9];
B = [.1 ; 0.1];
C = [10 5];
D = [0];
sys = idss(A,B,C,D,'Ts',0.1);Исследуйте нулевую полюсом карту.
pzmap(sys)

Системные полюса отмечены x, и нули отмечены o.
В данном примере загрузите массив 3 на 1 моделей передаточной функции.
load('tfArray.mat','sys'); size(sys)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
Постройте полюса и нули каждой модели в массиве с разными цветами. В данном примере используйте красный для первой модели, зеленой для второго и синего для третьей модели в массиве.
pzmap(sys(:,:,1),'r',sys(:,:,2),'g',sys(:,:,3),'b') sgrid

sgrid строит графики постоянного коэффициента затухания и собственной частоты в s-плоскости диаграммы нулей и полюсов.
Используйте pzmap вычислить полюса и нули следующей передаточной функции:
sys = tf([4.2,0.25,-0.004],[1,9.6,17]); [p,z] = pzmap(sys)
p = 2×1
-7.2576
-2.3424
z = 2×1
-0.0726
0.0131
Этот пример использует модель создания с восемью этажами, каждого с тремя степенями свободы: два смещения и одно вращение. Отношение ввода-вывода для любого из этих смещений представлено как модель с 48 состояниями, где каждое состояние представляет смещение или его скорость изменения (скорость).
Загрузите модель создания.
load('building.mat');
size(G)State-space model with 1 outputs, 1 inputs, and 48 states.
Постройте полюса и нули системы.
pzmap(G)

Из графика заметьте, что существуют многочисленные почти отменяющие нулевые полюсом пары, которые могли быть потенциально устранены, чтобы упростить модель без эффекта на полном ответе модели. pzmap полезно, чтобы визуально идентифицировать такие почти отменяющие нулевые полюсом пары, чтобы выполнить нулевое полюсом упрощение.
Используйте функции sgrid или zgrid к сюжетным линиям постоянного коэффициента затухания и собственной частоты в s - или z - плоскость на диаграмме нулей и полюсов.
Для моделей MIMO, pzmap отображения все системные полюса и нули передачи на одном графике. Чтобы сопоставить полюса и нули для отдельных пар ввода-вывода, использовать iopzmap.
Для дополнительных опций настроить внешний вид диаграммы нулей и полюсов, использовать pzplot.
