Уменьшайте сложность моделей линейного независимого от времени (LTI)
Приложение Model Reducer позволяет вам вычислить приближения уменьшаемого порядка старших моделей. Работа с моделями более низкоуровневыми может упростить анализ и систему управления. Более простые модели также легче изучить и управлять. Можно уменьшать модель объекта управления, чтобы фокусироваться на соответствующей динамике прежде, чем спроектировать контроллер для объекта. Или, можно использовать снижение сложности модели, чтобы упростить контроллер полного порядка.
Используя любой из следующих методов, Model Reducer помогает вам уменьшать порядок модели при сохранении характеристик модели, которые важны для приложения:
Сбалансированное Усечение — Удаляет состояния с относительно маленькими энергетическими вкладами.
Режимы Mode Selection — Select путем определения частотного диапазона интереса.
Нулевое полюсом Упрощение — Устраняет отмену или почти отмену нулевых полюсом пар.
Model Reducer предоставляет графики отклика и диаграммы погрешностей, чтобы помочь гарантировать, что модель уменьшаемого порядка сохраняет важную динамику. Для получения дополнительной информации о снижении сложности модели и почему это полезно, смотрите Основы Снижения сложности модели.
Для альтернативы приложению Model Reducer, которое позволяет вам в интерактивном режиме выполнить снижение сложности модели и сгенерировать код для live скрипта, смотрите Уменьшать задачу Порядка Модели в Live Editor.
MATLAB® Панель инструментов: На вкладке Apps, под Control System Design and Analysis, кликают по значку приложения.
Командная строка MATLAB: Войти modelReducer.
Model — В настоящее время выбранная модель для сокращенияЗадайте модель, которую вы хотите уменьшать путем выбора из Model выпадающего списка. Список включает все модели в настоящее время в Data Browser. Чтобы получить модель от рабочего пространства MATLAB в Data Browser, на вкладке Model Reducer, нажимают ![]() Import Model. Можно импортировать любого:
Import Model. Можно импортировать любого:
tf, ss, или zpk модель, которая является соответствующей. Моделью может быть SISO или MIMO, и непрерывный или дискретный.
Модели непрерывного времени не должны иметь задержек. Чтобы уменьшать модель непрерывного времени с задержками, сначала используйте pade аппроксимировать задержки как динамику модели.
Модели дискретного времени могут иметь задержки. Для Сбалансированного метода сокращения Усечения, использования приложения absorbDelay преобразовывать задержку в полюса в z = 0 прежде, чем уменьшать модель. Дополнительные состояния отражаются в графике отклика и графике сингулярного значения Ганкеля.
Обобщенная модель, такая как a genss модель. Приложение Model Reducer использует текущее значение или номинальную стоимость всех блоков системы управления в model (см. getValue).
Примечание
Model Reducer принимает, что единица измерения времени модели (задал в TimeUnit свойство модели), секунды. Если ваша модель не имеет TimeUnit = 'seconds'Использование chgTimeUnit преобразовывать модель в секунды.
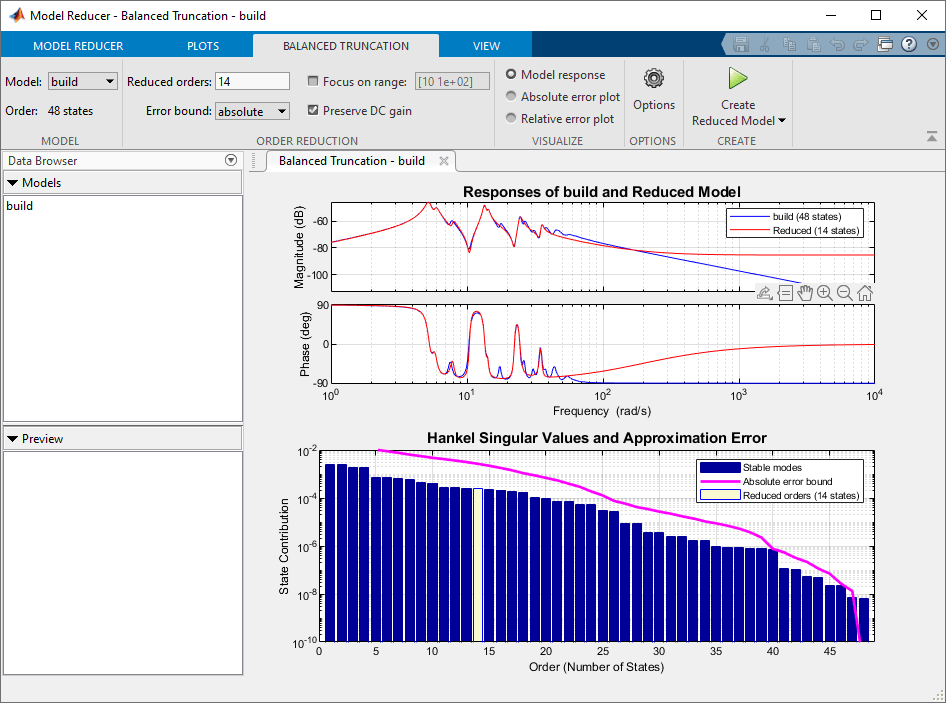
Reduced orders — Количество состояний в упрощенной моделиЗадайте количество состояний в модели уменьшаемого порядка. Любое значение разрешено, который падает между количеством нестабильных состояний в модели и количеством состояний в исходной модели. Если вы задаете одно значение, Model Reducer вычисляет и отображает ответы модели того порядка. Если вы задаете несколько значений, Model Reducer вычисляет модели всех заданных порядков и отображает их ответы на том же графике. Чтобы сохранить упрощенные модели в Data Browser, щелкнуть![]() .
.
Для получения дополнительной информации смотрите Сбалансированное Снижение сложности модели Усечения.
Пример 5
Пример: 4:7
Пример: [3,7,10]
Error Bound — Тип ошибки связанabsolute (значение по умолчанию) | relativeМожно выбрать между абсолютными и относительными погрешностями путем выбирания подходящей опции в Error Bound. Установка его к absolute управляет абсолютной погрешностью при установке его на relative управляет относительной погрешностью . Относительная погрешность дает лучшее соответствие через частоту, в то время как абсолютная погрешность подчеркивает области с большей частью усиления.
Для получения дополнительной информации смотрите Сбалансированное Снижение сложности модели Усечения.
Preserve DC Gain — Совпадайте с усилением DC упрощенной модели к исходной моделиКогда Preserve DC Gain проверяется, усиление DC упрощенной модели равняется усилению DC исходной модели. Когда поведение DC модели будет важно в вашем приложении, оставьте эту опцию проверяемой. Снимите флажок с опцией, чтобы получить лучшее соответствие поведения более высокой частоты.
Для получения дополнительной информации смотрите Сбалансированное Снижение сложности модели Усечения.
Focus on range — Ограничьте анализ заданными частотамиПо умолчанию Model Reducer анализирует сингулярные значения Ганкеля через все частоты. Ограничение этого анализа к конкретному частотному диапазону полезно, когда вы знаете, что модель имеет режимы вне необходимой области к вашему конкретному приложению. Когда вы применяете предел частоты, Model Reducer определяет, который состояния являются низкоэнергетическими состояниями, чтобы обрезать на основе их энергетического вклада в заданном частотном диапазоне только. Focus on range только доступен, когда Error Bound установлен в absolute.
Чтобы ограничить анализ вкладов состояния в конкретный частотный диапазон, проверяйте Focus on range. Затем перетащите вертикальные курсоры на графике отклика, чтобы задать частотный диапазон интереса. В качестве альтернативы введите частотный диапазон в текстовое поле как вектор из формы [fmin,fmax]. Модулями является rad/TimeUnit, где TimeUnit TimeUnit свойство модели вы уменьшаете.
Model — В настоящее время выбранная модель для сокращенияЗадайте модель, которую вы хотите уменьшать путем выбора из Model выпадающего списка. Список включает все модели в настоящее время в Data Browser. Чтобы получить модель от рабочего пространства MATLAB в Data Browser, на вкладке Model Reducer, нажимают ![]() Import Model. Можно импортировать любого:
Import Model. Можно импортировать любого:
tf, ss, или zpk модель, которая является соответствующей. Моделью может быть SISO или MIMO, и непрерывный или дискретный.
Модели непрерывного времени не должны иметь задержек. Чтобы уменьшать модель непрерывного времени с задержками, сначала используйте pade аппроксимировать задержки как динамику модели.
Модели дискретного времени могут иметь задержки. Для Сбалансированного метода сокращения Усечения, использования приложения absorbDelay преобразовывать задержку в полюса в z = 0 прежде, чем уменьшать модель. Дополнительные состояния отражаются в графике отклика и графике сингулярного значения Ганкеля.
Обобщенная модель, такая как a genss модель. Приложение Model Reducer использует текущее значение или номинальную стоимость всех блоков системы управления в model (см. getValue).
Для получения дополнительной информации смотрите Снижение сложности модели Выбора Режима.
Примечание
Уменьшайте Порядок Модели, принимает, что единица измерения времени модели (задал в TimeUnit свойство модели), секунды. Если ваша модель не имеет TimeUnit = 'seconds'Использование chgTimeUnit преобразовывать модель в секунды.
Lower Cutoff — Самая низкая частота режимаВведите частоту самой медленной динамики, чтобы сохранить в упрощенной модели. Полюса с собственной частотой ниже этого сокращения устраняются из упрощенной модели.
Upper Cutoff — Самая высокая частота режимаВведите частоту самой быстрой динамики, чтобы сохранить в упрощенной модели. Полюса с собственной частотой выше этого сокращения устраняются из упрощенной модели.
Model — В настоящее время выбранная модель для сокращенияЗадайте модель, которую вы хотите уменьшать путем выбора из Model выпадающего списка. Список включает все модели в настоящее время в Data Browser. Чтобы получить модель от рабочего пространства MATLAB в Data Browser, на вкладке Model Reducer, нажимают![]() Import Model. Можно импортировать любого:
Import Model. Можно импортировать любого:
tf, ss, или zpk модель, которая является соответствующей. Моделью может быть SISO или MIMO, и непрерывный или дискретный.
Модели непрерывного времени не должны иметь задержек. Чтобы уменьшать модель непрерывного времени с задержками, сначала используйте pade аппроксимировать задержки как динамику модели.
Модели дискретного времени могут иметь задержки. Для Сбалансированного метода сокращения Усечения, использования приложения absorbDelay преобразовывать задержку в полюса в z = 0 прежде, чем уменьшать модель. Дополнительные состояния отражаются в графике отклика и графике сингулярного значения Ганкеля.
Обобщенная модель, такая как a genss модель. Приложение Model Reducer использует текущее значение или номинальную стоимость всех блоков системы управления в model (см. getValue).
Simplification of Pole-Zero Pairs — Допуск к удалению нулей-полюсовУстановите погрешность для удаления нулей-полюсов при помощи ползунка или ввода значения в текстовом поле. Значение определяет, как близко друг к другу полюс и нуль должны быть для Model Reducer, чтобы устранить их из упрощенной модели. Перемещение ползунка налево или ввод меньшего значения в текстовом поле упрощают модель меньше путем отмены меньшего количества полюсов и нулей. Перемещение ползунка направо или ввод большего значения, упрощают модель больше путем отмены полюсов и нулей, которые являются далее независимо.
Для получения дополнительной информации смотрите Нулевое полюсом Упрощение.
modelReducermodelReducer открывает приложение Model Reducer без моделей в Data Browser. Чтобы импортировать модель из рабочего пространства MATLAB, нажмите![]() Import Model.
Import Model.
modelReducer(model)modelReducer( открывает приложение и импортирует заданную модель LTI. model)model может быть a:
tf, ss, или zpk модель, которая является соответствующей. Моделью может быть SISO или MIMO, и непрерывный или дискретный.
Модели непрерывного времени не должны иметь задержек. Чтобы уменьшать модель непрерывного времени с задержками, сначала используйте pade аппроксимировать задержки как динамику модели.
Модели дискретного времени могут иметь задержки. Для Сбалансированного метода сокращения Усечения, использования приложения absorbDelay преобразовывать задержку в полюса в z = 0 прежде, чем уменьшать модель. Дополнительные состояния отражаются в графике отклика и графике сингулярного значения Ганкеля.
Обобщенная модель, такая как a genss модель. Приложение Model Reducer использует текущее значение или номинальную стоимость всех блоков системы управления в model (см. getValue).
modelReducer(model1,...,modelN)modelReducer( открывает приложение и импортирует заданные модели.model1,...,modelN)
modelReducer(sessionFile)modelReducer( открывает приложение и загружает ранее сохраненный сеанс. sessionFile)sessionFile имя файла данных сеанса в текущей рабочей директории или на пути MATLAB.
Чтобы сохранить данные о сеансе на диск, в приложении Model Reducer, на вкладке Model Reducer, нажимают![]() Save Session. Сохраненные данные о сеансе включают текущую настройку графика и все модели в Data Browser.
Save Session. Сохраненные данные о сеансе включают текущую настройку графика и все модели в Data Browser.
