Объект фильтра частиц для онлайновой оценки состояния
Фильтр частиц является рекурсивным, Байесовым средством оценки состояния, которое использует дискретные частицы, чтобы аппроксимировать апостериорное распределение предполагаемого состояния. Для онлайновой оценки состояния полезно, когда измерения и системная модель, которая связывает состояния модели с измерениями, доступны. Алгоритм фильтра частиц вычисляет оценки состояния рекурсивно и включает инициализацию, предсказание и шаги коррекции.
particleFilter создает объект для онлайновой оценки состояния дискретного времени нелинейная система с помощью алгоритма фильтра частиц дискретного времени.
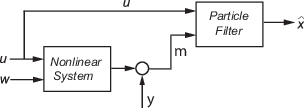
Считайте объект с состояниями x, входом u, выходом m, шум процесса w и измерение y. Примите, что можно представлять объект как нелинейную систему.
Алгоритм вычисляет оценки состояния из нелинейной системы с помощью функций правдоподобия изменения состояния и измерения вы задаете.
Программное обеспечение поддерживает произвольные нелинейные модели изменения состояния и измерения с произвольными распределениями шума процесса и измерения.
Чтобы выполнить онлайновую оценку состояния, создайте нелинейную функцию изменения состояния и функцию правдоподобия измерения. Затем создайте particleFilter объект с помощью этих нелинейных функций. После того, как вы создаете объект:
Инициализируйте частицы с помощью initialize команда.
Предскажите оценки состояния на следующем шаге с помощью predict команда.
Откорректируйте оценки состояния с помощью correct команда.
Шаг предсказания использует последнее состояние, чтобы предсказать следующее состояние на основе модели изменения состояния, которую вы предоставляете. Шаг коррекции использует измерение датчика тока, чтобы откорректировать оценку состояния. Алгоритм опционально перераспределяет или передискретизирует, частицы в пространстве состояний, чтобы совпадать с апостериорным распределением предполагаемого состояния. Каждая частица представляет гипотезу дискретного состояния этих переменных состояния. Набор всех частиц используется, чтобы помочь определить оценку состояния.
pf = particleFilter(StateTransitionFcn,MeasurementLikelihoodFcn)StateTransitionFcn функция, которая вычисляет частицы (гипотезы состояния) на следующем временном шаге, учитывая вектор состояния на временном шаге. MeasurementLikelihoodFcn функция, которая вычисляет вероятность каждой частицы на основе измерений датчика.
После создания объекта используйте initialize команда, чтобы инициализировать частицы известным средним значением и ковариацией или равномерно распределенные частицы в заданных границах. Затем используйте correct и predict команды, чтобы обновить частицы (и следовательно оценка состояния) использование измерений датчика.
initialize | Инициализируйте состояние фильтра частиц |
predict | Предскажите ошибочную ковариацию оценки состояния и оценки состояния на следующем временном шаге с помощью сигма-точечного фильтра Калмана или фильтра частиц |
correct | Исправьте состояние и ковариацию ошибки оценки состояния с помощью сигма-точечного фильтра Калмана, или фильтра частиц и измерений |
getStateEstimate | Извлечение лучше всего утверждает оценку и ковариацию от частиц |
clone | Скопируйте онлайновый объект оценки состояния |
Чтобы создать объект фильтра частиц для оценки состояний вашей системы, создайте соответствующую функцию изменения состояния и функцию правдоподобия измерения для системы.
В этом примере, функциональном vdpParticleFilterStateFcn описывает приближение дискретного времени к осциллятору Ван дер Поля параметром нелинейности, mu, равный 1. Кроме того, это шум процесса моделей Gaussian. vdpMeasurementLikelihood функция вычисляет вероятность частиц от шумных измерений первого состояния, принимая Гауссово распределение шума измерения.
Создайте объект фильтра частиц. Используйте указатели на функцию, чтобы предоставить функции правдоподобия изменения состояния и измерения объекту.
myPF = particleFilter(@vdpParticleFilterStateFcn,@vdpMeasurementLikelihoodFcn);
Чтобы инициализировать и оценить состояния и ошибочную ковариацию оценки состояния от созданного объекта, используйте initialize, predict, и correct команды.
Copyright 2012 The MathWorks, Inc..
Загрузите данные об ОДУ Ван дер Поля и задайте шаг расчета.
vdpODEdata.mat содержит симуляцию ОДУ Ван дер Поля параметром нелинейности mu=1, с помощью ode45, начальными условиями [2;0]. Истинное состояние было извлечено с шагом расчета dt = 0.05.
addpath(fullfile(matlabroot,'examples','control','main')) % add example data load ('vdpODEdata.mat','xTrue','dt') tSpan = 0:dt:5;
Получите измерения. В данном примере датчик измеряет первое состояние с Гауссовым шумом со стандартным отклонением 0.04.
sqrtR = 0.04; yMeas = xTrue(:,1) + sqrtR*randn(numel(tSpan),1);
Создайте фильтр частиц и установите функции правдоподобия изменения состояния и измерения.
myPF = particleFilter(@vdpParticleFilterStateFcn,@vdpMeasurementLikelihoodFcn);
Инициализируйте фильтр частиц в [2; 0] состояния с модульной ковариацией и использованием 1000 частицы.
initialize(myPF,1000,[2;0],eye(2));
Выберите mean оценка состояния и systematic передискретизация методов.
myPF.StateEstimationMethod = 'mean'; myPF.ResamplingMethod = 'systematic';
Оцените состояния с помощью correct и predict команды и хранилище предполагаемые состояния.
xEst = zeros(size(xTrue)); for k=1:size(xTrue,1) xEst(k,:) = correct(myPF,yMeas(k)); predict(myPF); end
Постройте результаты и сравните предполагаемые и истинные состояния.
figure(1) plot(xTrue(:,1),xTrue(:,2),'x',xEst(:,1),xEst(:,2),'ro') legend('True','Estimated')

rmpath(fullfile(matlabroot,'examples','control','main')) % remove example data
[1] Т. Ли, М. Болик, пополудни Djuric, "Передискретизируя Методы для Фильтрации Частицы: Классификация, реализация и стратегии", Журнал Обработки сигналов IEEE, издание 32, № 3, стр 70-86, май 2015.
