ASAM OpenDRIVE® открытый формат файла, который позволяет вам задать большие и комплексные дорожные сети. Используя приложение Driving Scenario Designer, можно импортировать дороги и маршруты из файла ASAM OpenDRIVE в ведущий сценарий. Можно затем добавить агентов и датчики к сценарию и сгенерировать синтетический маршрут и обнаружения объектов для тестирования ведущих алгоритмов, разработанных в MATLAB®. В качестве альтернативы протестировать ведущие алгоритмы, разработанные в Simulink®, можно использовать блок Scenario Reader, чтобы считать дорожную сеть и агентов в модель.
Поддержки приложений, импортирующие дорожные сети из OpenDRIVE® версии файла 1.4 и 1.5, а также версия файла 1.6 ASAM OpenDRIVE.
Импортировать дороги ASAM OpenDRIVE и маршруты в drivingScenario объект вместо в приложение, используйте roadNetwork функция.
Откройте приложение Driving Scenario Designer. В командной строке MATLAB введите:
drivingScenarioDesigner
Чтобы импортировать файл ASAM OpenDRIVE, на панели инструментов приложения, нажимают Import> ASAM OpenDRIVE File. Файл, который вы выбираете, должен быть допустимым файлом ASAM OpenDRIVE типа .xodr или .xml.
От вашей корневой папки MATLAB перейдите к и откройте этот файл:
matlabroot/examples/driving/data/roundabout.xodr
Поскольку вы не можете импортировать дорожную сеть ASAM OpenDRIVE в существующий файл сценария, приложение предлагает вам сохранять свой текущий ведущий сценарий.
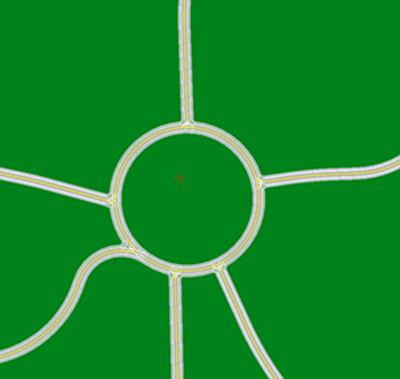
Scenario Canvas отображений приложения импортированная дорожная сеть.
Примечание
С R2021b функция импорта ASAM OpenDRIVE предлагает функциональные и визуальные улучшения, а также несколько дополнительных ограничений.
Можно теперь добавить новые дороги к сценарию и экспортировать функцию MATLAB после импорта дорожной сети ASAM OpenDRIVE.
Можно теперь импортировать дороги с несколькими техническими требованиями маршрута.
Импортированные дороги показывают границы, которые не показали ранее.
Дорожные центры всегда появляются посреди импортированных дорог. Ранее некоторые дороги показывали дорожные центры на дорожных ребрах.
Соединения представлены с помощью RoadGroup возразите что сегменты дороги объединений в рамках соединения. Ранее каждый дорожный сегмент в рамках соединения был представлен отдельно. В результате импортированные дорожные сети теперь используют меньшее число дорог.
Дорожные идентификаторы и количество дорог в ведущем сценарии не могут совпадать с заданными в импортированном файле ASAM OpenDRIVE.
Дороги с резким искривлением не могут быть импортированы.
Дороги в импортированной сети являются тысячами метров долго. Используйте колесо мыши, чтобы увеличить масштаб дорожная сеть и смотреть его более тесно. Дорожная сеть содержит кольцо, которое соединяет шесть дорог.
Проверьте, что дорожная сеть импортировала как ожидалось, имея в виду нижеследующие ограничения и поведения в рамках приложения.
Приложение Driving Scenario Designer не поддерживает все компоненты спецификации ASAM OpenDRIVE.
Можно импортировать только маршруты, информацию о типе маршрута и дороги. Импорт дорожных объектов и сигналов трафика не поддерживается.
Файлы ASAM OpenDRIVE, содержащие большие дорожные сети, могут взять до нескольких минут, чтобы загрузить. Кроме того, эти дорожные сети могут вызвать медленные взаимодействия на холсте приложения. Примеры больших дорожных сетей включают единицы, которые моделируют дороги города или единиц с дорогами, которые являются тысячами метров долго.
Маршруты с переменными ширинами не поддерживаются. Ширина установлена в самую высокую ширину, найденную в том маршруте. Например, если маршрут имеет ширину, которая варьируется от 2 метров до 4 метров, приложение устанавливает ширину маршрута на 4 метра повсюду.
Дороги с маршрутом вводят информацию, указанную как driving'Граница' , restricted, shoulder, и parking поддерживаются. Маршруты с любой другой информацией о типе маршрута импортируются как маршруты границы.
Маршрут, отмечающий стили Bott Dots, Curbs, и Grass не поддерживаются. Маршруты с этими стилями маркировки импортируются как не отмеченные.
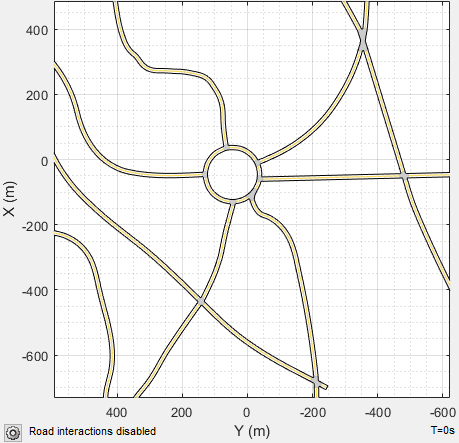
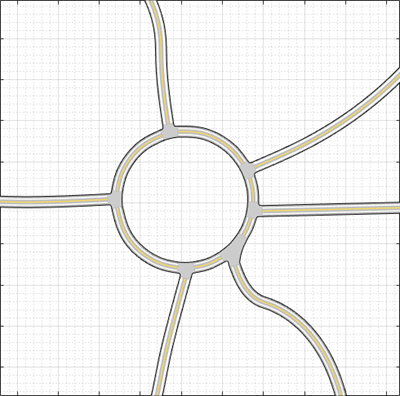
В приложении Driving Scenario Designer ориентация дорог может отличаться от ориентации дорог в других инструментах то отображение дороги ASAM OpenDRIVE. Таблица показывает это различие в ориентации между приложением и Средством просмотра OpenDRIVE ODR.
| Driving Scenario Designer | Средство просмотра OpenDRIVE ODR |
|---|---|
|
|
|
В средстве просмотра OpenDRIVE ODR X - ось запускается вдоль нижней части средства просмотра и Y - запуски оси вдоль левой стороны средства просмотра.
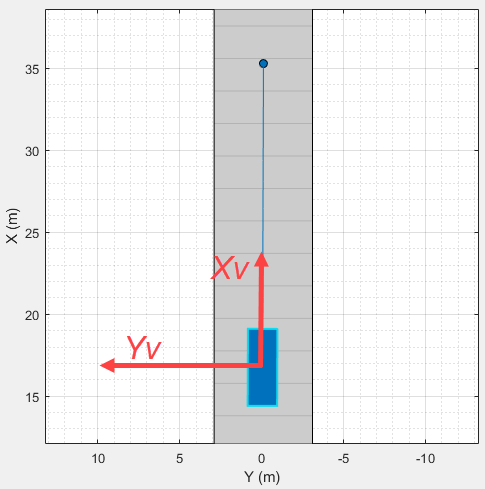
В приложении Driving Scenario Designer Y - ось запускается вдоль нижней части холста и X - запуски оси вдоль левой стороны холста. Эта система мировой координаты в приложении выравнивается с системой координат транспортного средства (XV, YV) используемый транспортными средствами в ведущем сценарии, где:
XV - ось (продольная ось) указывает вперед от транспортного средства в сценарии.
YV - ось (боковая ось) указывает слева от транспортного средства, как просматривается при направлении вперед.
Для получения дополнительной информации о системах координат, смотрите Системы координат в Automated Driving Toolbox.
Можно добавить агентов и датчики к сценарию, содержащему дороги ASAM OpenDRIVE.
Прежде, чем добавить агента и датчики, если вам включили дорожные взаимодействия, полагают, что отключение их предотвращает вас от случайного перетаскивания дорожных центров и изменения дорожной сети. Если дорожные взаимодействия включены, в нижнем левом углу Scenario Canvas, нажимают кнопку Configure the Scenario Canvas![]() , и затем очищают Enable road interactions.
, и затем очищают Enable road interactions.
Добавьте автомобиль, оборудованный датчиком в сценарий путем щелчка правой кнопкой по одной из дорог в холсте и выбора Add Car. Чтобы задать траекторию автомобиля, щелкните правой кнопкой по автомобилю по холсту, выберите Add Forward Waypoints (Ctrl+F) и добавьте waypoints вдоль дороги для автомобиля, чтобы пройти. После того, как вы добавите последний waypoint вдоль дороги, нажмите Enter. Автомобиль самовращается в направлении первого waypoint.
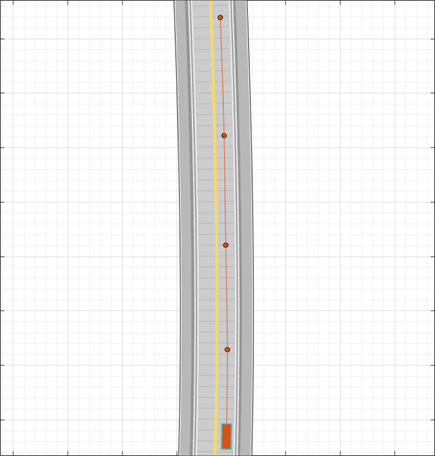
Добавьте датчик камеры в автомобиль, оборудованный датчиком. На панели инструментов приложения нажмите Add Camera. Затем на холсте датчика добавьте камеру в предопределенное местоположение, представляющее переднее окно автомобиля.
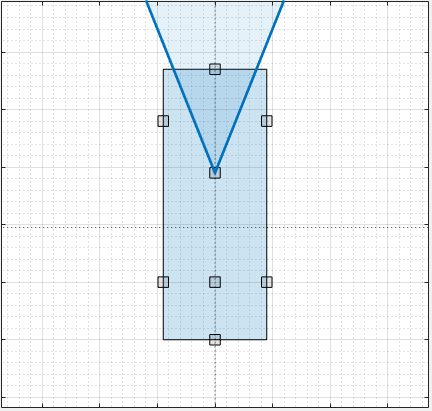
Сконфигурируйте камеру, чтобы обнаружить маршруты. На левой панели, на вкладке Sensors, расширяют раздел Detection Parameters. Затем установите параметр Detection Type на Lanes.
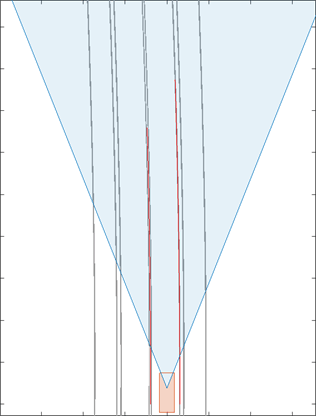
Чтобы сгенерировать обнаружения маршрута от камеры, на панели инструментов приложения, нажимают Run. Когда сценарий запускается, Ego-Centric View отображает сценарий с точки зрения автомобиля, оборудованного датчиком. Bird’s-Eye Plot отображает лево-маршрут и контуры правильного маршрута автомобиля, оборудованного датчиком.
Чтобы экспортировать функцию MATLAB, которая генерирует сценарий и его обнаружения на панели инструментов приложения, нажимают Export> MATLAB Function.
Чтобы экспортировать обнаружения в рабочее пространство MATLAB, на панели инструментов приложения, нажимают Export> Export Sensor Data. Назовите переменную рабочей области и нажмите OK.
После того, как вы сгенерируете обнаружения, нажмите Save, чтобы сохранить файл сценария. Кроме того, можно сохранить модели датчика как отдельные файлы. Можно также сохранить дорогу и модели агента вместе как отдельный файл сценария.
Можно вновь открыть этот файл сценария из приложения. В качестве альтернативы в командной строке MATLAB, можно использовать этот синтаксис.
drivingScenarioDesigner(scenarioFileName)
Если вы разрабатываете ведущий алгоритм в Simulink, можно использовать блок Scenario Reader, чтобы считать дороги и агентов от drivingScenario возразите или файл сценария в вашу модель. Файлы сценария, содержащие большие дорожные сети ASAM OpenDRIVE, могут взять до нескольких минут, чтобы читать в модели. Блок Scenario Reader непосредственно не считывает данные о датчике. Добавить датчики создало в приложении к модели Simulink, можно сгенерировать модель, содержащую сценарий и датчики путем выбора Export> Simulink Model. В этой модели блок Scenario Reader читает сценарий и радар, и блоки датчика видения моделируют датчики.