Bird's-Eye Scope визуализирует сигналы из вашего Simulink® модель, которые представляют аспекты ведущего сценария. Используя осциллограф, можно анализировать:
Покрытия датчика видения, радара и датчиков лидара
Обнаружения датчика агентов и контуров маршрута
Дорожки перемещения объектов в сценарии
Этот пример показывает вам, как отобразить эти сигналы на осциллографе и анализировать сигналы в процессе моделирования.
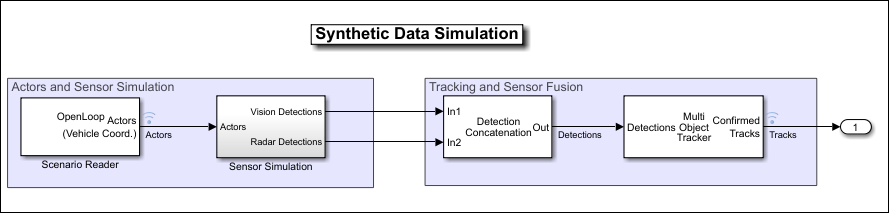
Откройте модель, содержащую сигналы для обнаружений датчика и дорожек. Эта модель используется в Cочетании датчиков Используя Синтетические Данные о Радаре и Видении в примере Simulink. Также добавьте папку модели к MATLAB® путь поиска файлов.
addpath(genpath(fullfile(matlabroot,'examples','driving'))) open_system('SyntheticDataSimulinkExample')
Откройте осциллограф от панели инструментов Simulink. Под Review Results нажмите Bird's-Eye Scope.
Когда вы открываете сначала Bird's-Eye Scope, холст осциллографа является пробелом и не отображает сигналов. Чтобы найти сигналы из открытой модели, что осциллограф может отобразиться на панели инструментов осциллографа, нажимают Find Signals. Осциллограф обновляет блок-схему и автоматически находит сигналы в модели.

Левая панель перечисляет все сигналы, что осциллограф нашел. Эти сигналы сгруппированы на основе их источников в модели.
| Группа сигнала | Описание | Источники сигнала |
|---|---|---|
| Ground Truth | Дорожные контуры, маркировки маршрута и барьеры в сценарии Вы не можете изменить эту группу или любой из ее сигналов. Чтобы смотреть большие дорожные сети, используйте окно World Coordinates View. Смотрите Представления Транспортного средства и Мировой координаты. |
|
| Actors | Агенты в сценарии, включая автомобиль, оборудованный датчиком Вы не можете изменить эту группу или любой из ее сигналов или подгрупп. Чтобы просмотреть агентов, которые расположены далеко от автомобиля, оборудованного датчиком, используйте окно World Coordinates View. Смотрите Представления Транспортного средства и Мировой координаты. |
|
| Sensor Coverage | Зоны охвата видения, радара и датчиков лидара, отсортированных в Vision, Radar и подгруппы Lidar Можно изменить сигналы в этой группе. Можно переименовать или удалить подгруппы, но не группу Sensor Coverage верхнего уровня. Можно также добавить подгруппы и сигналы движения между подгруппами. Если вы удаляете подгруппу, ее сигналы перемещаются к группе Sensor Coverage верхнего уровня. | |
| Detections | Обнаружения получены из видения, радара и датчиков лидара, отсортированных в Vision, Radar и подгруппы Lidar Можно изменить сигналы в этой группе. Можно переименовать или удалить подгруппы, но не группу Detections верхнего уровня. Можно также добавить подгруппы и сигналы движения между подгруппами. Если вы удаляете подгруппу, ее сигналы перемещаются к группе Detections верхнего уровня. | |
| Tracks | Дорожки объектов в сценарии Можно изменить сигналы в этой группе. Можно переименовать или удалить подгруппы, но не группу Tracks верхнего уровня. Можно также добавить подгруппы в эту группу и сигналы движения в них. Если вы удаляете подгруппу, ее сигналы перемещаются к группе Tracks верхнего уровня. |
Bird's-Eye Scope отображает дорожки в координатах автомобиля, оборудованного датчиком. Дорожки в любой другой системе координат появятся, как возмещено в осциллографе. |
| Other Applicable Signals | Сигналы, что осциллограф не может автоматически сгруппироваться, такие как единицы, которые комбинируют информацию от нескольких датчиков Можно изменить сигналы в этой группе, но вы не можете добавить подгруппы. Сигналы в этой группе не отображаются в процессе моделирования. |
|
Перед симуляцией, но после нажатия Find Signals, холст осциллографа отображает все сигналы Ground Truth за исключением агентов неэго и все сигналы Sensor Coverage. Агенты неэго и сигналы под Detections и Tracks не отображаются, пока вы не симулируете модель. Сигналы в Other Applicable Signals не отображаются в процессе моделирования. Если вы хотите, чтобы осциллограф отобразил определенные сигналы, переместил их в соответствующую группу перед симуляцией. Если соответствующая группа не существует, создайте тот.
Симулируйте модель из Bird's-Eye Scope путем нажатия на Run. Холст осциллографа отображает обнаружения и дорожки. Чтобы отобразить легенду, на панели инструментов осциллографа, нажимают Legend.

В процессе моделирования можно выполнить эти действия:
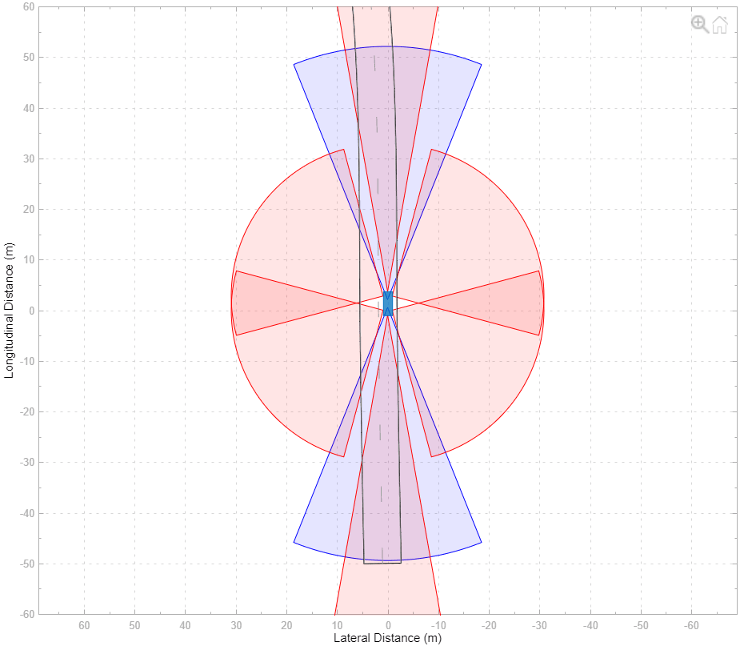
Смотрите обнаружения, дорожки, зоны охвата датчика и поведение автомобиля, оборудованного датчиком. Представление по умолчанию отображает симуляцию в координатах транспортного средства и сосредоточено на автомобиле, оборудованном датчиком. Чтобы просмотреть более широкую область вокруг автомобиля, оборудованного датчиком или просмотреть другие части сценария, на панели инструментов осциллографа, нажимают World Coordinates. Окно World Coordinates View отображает целый сценарий с окруженным автомобилем, оборудованным датчиком. Этот круг не является зоной охвата датчика. Чтобы возвратиться к отображению по умолчанию любого окна, переместите указатель через окно, и в верхнем правом углу, нажмите кнопку "Домой"![]() , которая появляется. Для получения дополнительной информации об этих представлениях смотрите Представления Транспортного средства и Мировой координаты.
, которая появляется. Для получения дополнительной информации об этих представлениях смотрите Представления Транспортного средства и Мировой координаты.
Обновите свойства сигнала. Чтобы получить доступ к свойствам сигнала, сначала выберите сигнал из левой панели. Затем на панели инструментов осциллографа нажмите Properties. Используя эти свойства, можно, например, показать или скрыть зоны охвата датчика или обнаружения. Кроме того, чтобы подсветить определенные зоны охвата датчика, можно изменить их цвет или прозрачность.
Обновите настройки Bird's-Eye Scope, такие как изменение пределов осей окна Vehicle Coordinates View или изменения отображения имен сигнала. На панели инструментов осциллографа нажмите Settings. Вы не можете изменить настройки Track position selector и Track velocity selector в процессе моделирования. Для получения дополнительной информации смотрите раздел Settings > Vehicle Coordinates View страницы с описанием Bird's-Eye Scope.
После симуляции можно скрыть определенные обнаружения или дорожки для следующей симуляции. На левой панели, под Detections или Tracks, щелкают правой кнопкой по сигналу, который вы хотите скрыть. Затем выберите Move to Other Applicable, чтобы переместить тот сигнал в группу Other Applicable Signals. Чтобы скрыть зоны охвата датчика, выберите соответствующий сигнал на левой панели, и на вкладке Properties, очистите параметр Show Sensor Coverage. Вы не можете скрыть сигналы Ground Truth в процессе моделирования.
Чтобы далее организовать сигналы, можно переименовать группы сигнала или сигналы движения в новые группы. Например, можно переименовать Vision и подгруппы Radar к Front of Car и Back of Car. Затем можно перетащить сигналы по мере необходимости, чтобы переместить их в соответствующие группы на основе новых названий группы. Когда вы перетаскиваете сигнал новой группе, цвет сигнала изменяется, чтобы совпадать с цветом, присвоенным его группе.
Вы не можете переименовать или удалить группы верхнего уровня на левой панели, но можно переименовать или удалить любую подгруппу. Если вы удаляете подгруппу, ее сигналы перемещаются к группе верхнего уровня.
После того, как вы будете запускать симуляцию, будете изменять модель и будете смотреть, как изменения влияют на визуализацию на Bird's-Eye Scope. Например, в подсистеме Sensor Simulation модели, откройте два блока Vision Detection Generator. Эти блоки имеют индексы датчика 1 и 2, соответственно. На вкладке Measurements каждого блока уменьшайте параметр Maximum detection range (m) до 50. Чтобы видеть, как покрытие датчика изменяется, повторно выполните симуляцию.
Когда вы изменяете параметры блоков, можно повторно выполнить симуляцию, не имея необходимость находить сигналы снова. Если вы добавляете или удаляете блоки, порты или сигнальные линии, то необходимо нажать Find Signals снова прежде, чем повторно выполнить симуляцию.
Сохраните и закройте модель. Настройки для Bird's-Eye Scope также сохранены.
Если вы вновь открыли модель и Bird's-Eye Scope, холст осциллографа первоначально пуст.
Нажмите Find Signals, чтобы найти сигналы снова и просмотреть сохраненные свойства сигнала. Например, если вы уменьшали область значений обнаружения на предыдущем шаге, холст осциллографа отображает эту уменьшаемую область значений.
Когда вы закончите симулируя модель, удалите папку модели из пути поиска файлов MATLAB.
rmpath(genpath(fullfile(matlabroot,'examples','driving')))
