Ориентация от акселерометра, гироскопа и показаний магнитометра
Navigation Toolbox / Расположение Мультидатчика / Фильтры Навигации
Sensor Fusion and Tracking Toolbox / Расположение Мультидатчика / Фильтры Навигации
AHRS Simulink® блокируйте акселерометр предохранителей, магнитометр и данные о датчике гироскопа, чтобы оценить ориентацию устройства.
Примечание: следующий алгоритм только применяется к системе координат NED.
Блок AHRS использует структуру Фильтра Калмана с девятью осями, описанную в [1]. Алгоритм пытается отследить ошибки в ориентации, смещении гироскопа, линейном ускорении и магнитном воздействии, чтобы вывести итоговую ориентацию и скорость вращения. Вместо того, чтобы отследить ориентацию непосредственно, косвенный Фильтр Калмана моделирует ошибочный процесс, x, с рекурсивным обновлением:
где x k 12 1 вектор, состоящий из:
θk – Вектор ошибок ориентации 3 на 1, в градусах, во время k
bk – Нуль гироскопа 3 на 1 угловой вектор смещения уровня, в градусе/с, во время k
ak – Ускоряющий вектор ошибок 3 на 1 измеряется в системе координат датчика, в g, во время k
dk – Магнитный вектор ошибок воздействия 3 на 1 измеряется в системе координат датчика, в µT, во время k
и где w k является 12 1 аддитивным шумовым вектором, и F k является моделью изменения состояния.
Поскольку x k задан как ошибочный процесс, априорная оценка всегда является нулем, и поэтому модель изменения состояния, F k, является нулем. Это понимание приводит к следующему сокращению стандарта уравнения Кальмана:
Стандарт уравнения Кальмана:
Уравнения Кальмана использовали в этом алгоритме:
где:
xk− – предсказанный (априорно) утверждают оценку; ошибочный процесс
Pk− – предсказанный (априорно) оценивают ковариацию
yk – инновации
Sk – инновационная ковариация
Kk – Усиление Кальмана
xk+ – обновленный (по опыту) утверждают оценку
Pk+ – обновленный (по опыту) оценивают ковариацию
k представляет итерацию, верхний индекс + представляет по опыту оценка и верхний индекс − представляет априорную оценку.
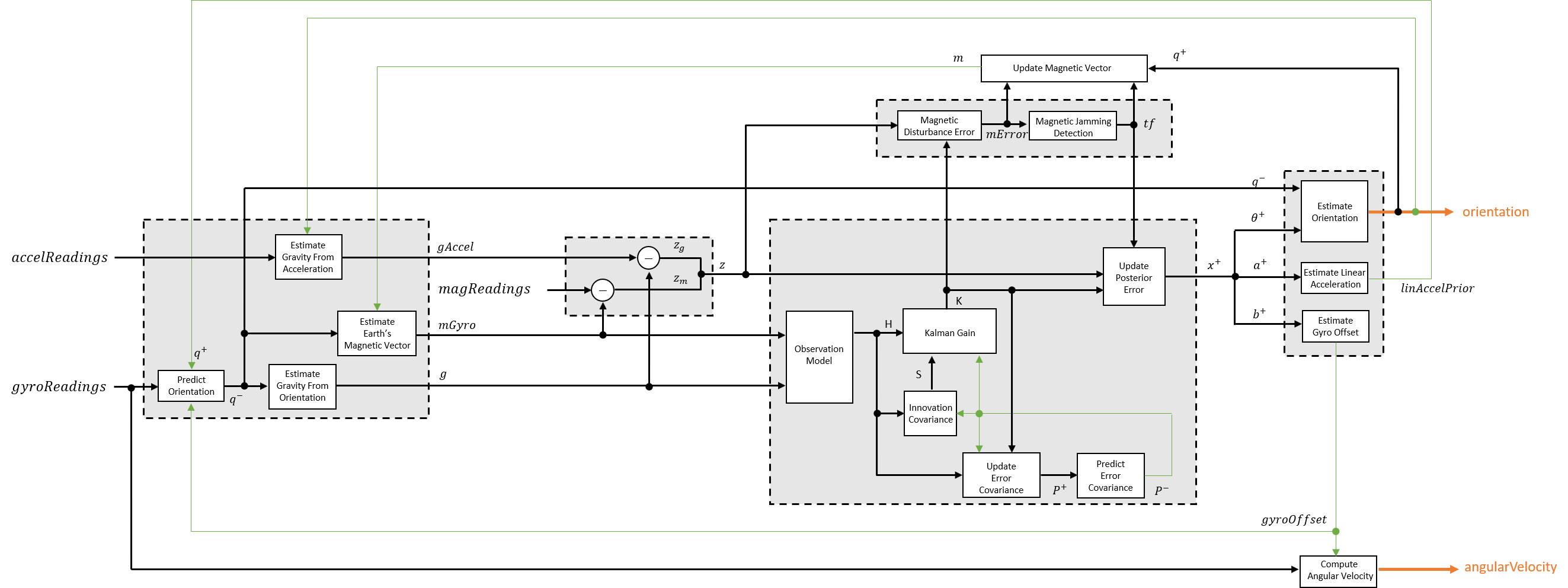
Графические и следующие шаги описывают одну основанную на системе координат итерацию через алгоритм.
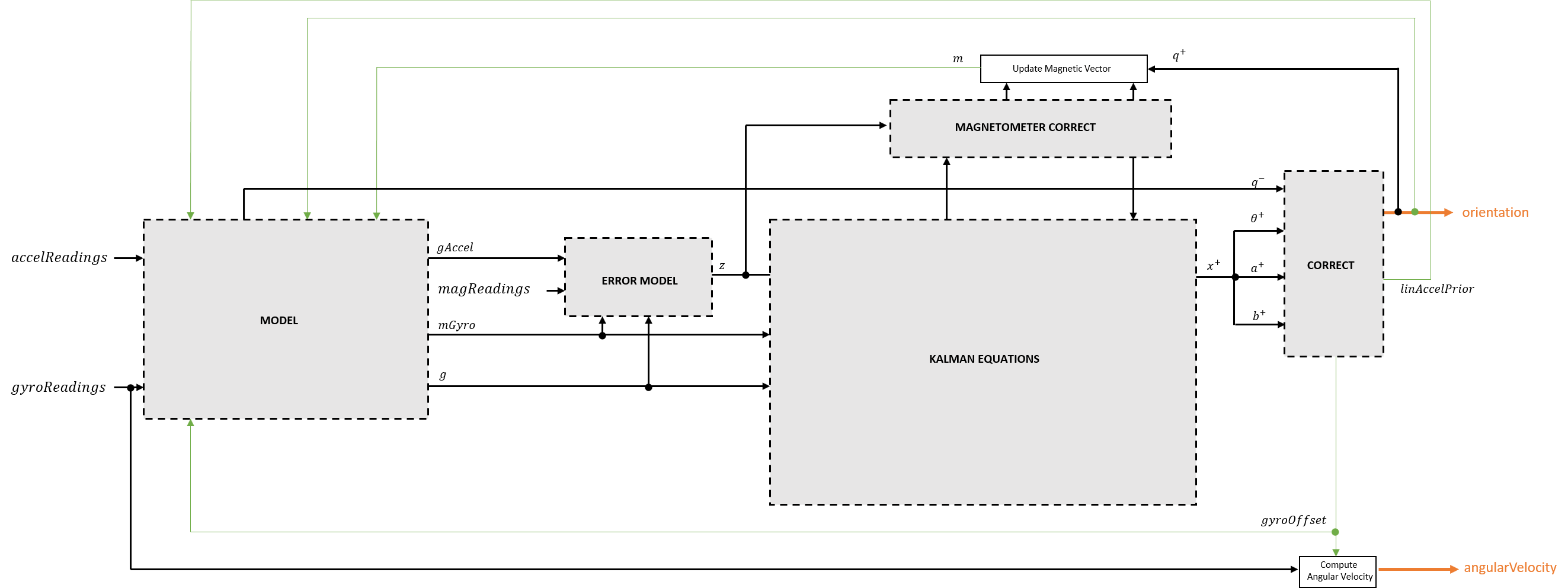
Перед первой итерацией, accelReadings, gyroReadings, и magReadings входные параметры разделяются на блоки в DecimationFactor- 3 системы координат. Для каждого фрагмента алгоритм использует актуальнейшие показания акселерометра и магнитометра, соответствующие фрагменту показаний гироскопа.
Идите через алгоритм для объяснения каждого этапа подробного обзора.
Ускорение моделей алгоритма и угловое изменение как линейные процессы.
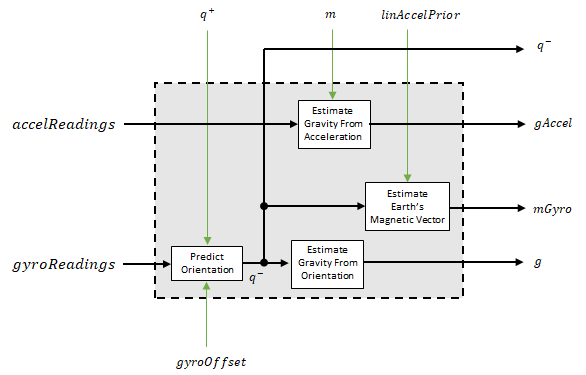
Ориентация для текущей системы координат предсказана первой оценкой углового изменения от предыдущей системы координат:
где N является фактором децимации, заданным фактором Децимации, и fs является частотой дискретизации.
Угловое изменение преобразовано в кватернионы с помощью rotvec
quaternion синтаксис конструкции:
Предыдущая оценка ориентации обновляется путем вращения его ΔQ:
Во время первой итерации, оценки ориентации, q−, инициализируется ecompass.
Вектор силы тяжести интерпретирован как третий столбец кватерниона, q−, в матричной форме вращения:
Вторая оценка вектора силы тяжести сделана путем вычитания затухшей линейной ускоряющей оценки предыдущей итерации от показаний акселерометра:
Магнитный вектор земли оценивается путем вращения магнитной векторной оценки от предыдущей итерации априорной оценкой ориентации в матричной форме вращения:
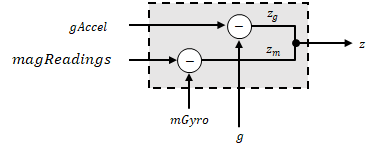
Ошибочная модель комбинирует два различия:
Различие между силой тяжести оценивает от показаний акселерометра и оценки силы тяжести от показаний гироскопа:
Различие между магнитной векторной оценкой от показаний гироскопа и магнитной векторной оценкой от магнитометра:
Магнитометр правильные оценки ошибка в магнитной векторной оценке и обнаруживает магнитный затор.
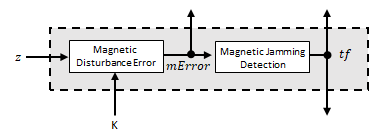
Магнитная ошибка воздействия вычисляется умножением матриц усиления Кальмана, сопоставленного с магнитным вектором с сигналом ошибки:
Усиление Кальмана, K, является усилением Кальмана, вычисленным в текущей итерации.
Магнитный затор определяется путем проверки, что степень обнаруженного магнитного воздействия меньше чем или равна четыре раза степени ожидаемой силы магнитного поля:
ExpectedMagneticFieldStrength является свойством ahrsfilter.
Уравнения Кальмана используют оценку силы тяжести, выведенную из показаний гироскопа, g, магнитной векторной оценки, выведенной из показаний гироскопа, mGyro и наблюдения за ошибочным процессом, z, чтобы обновить коэффициент усиления Кальмана и посреднические ковариационные матрицы. Усиление Кальмана применяется к сигналу ошибки, z, чтобы вывести по опыту ошибочная оценка, x+.
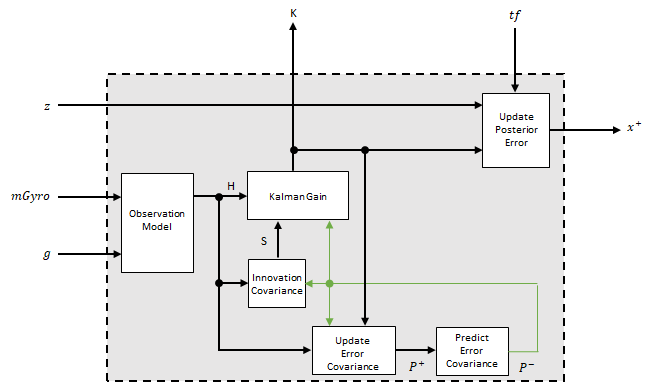
Модель наблюдения сопоставляет 1 3 наблюдаемые состояния, g и mGyro, в 6 12 истинное состояние, H.
Модель наблюдения создается как:
где g x, g y и g z является x - y - и z - элементы вектора силы тяжести, оцененного от априорной ориентации, соответственно. m x, m y и m z является x - y - и z - элементы магнитного вектора, оцененного от априорной ориентации, соответственно. κ является константой, определенной свойствами фактора Частоты дискретизации и Децимации: κ = Decimation factor/Sample rate.
Инновационная ковариация 6 6, матрица раньше отслеживала изменчивость в измерениях. Инновационная ковариационная матрица вычисляется как:
где
H является матрицей модели наблюдения
P− предсказанная (априорная) оценка ковариации модели наблюдения, вычисленной в предыдущей итерации
R является ковариацией шума модели наблюдения, вычисленного как:
где
и
Ошибочная оценочная ковариация 12 12, матрица раньше отслеживала изменчивость в состоянии.
Ошибочная оценочная ковариационная матрица обновляется как:
где K является усилением Кальмана, H является матрицей измерения и P− ошибочная оценочная ковариация, вычисленная во время предыдущей итерации.
Ошибочная оценочная ковариация 12 12, матрица раньше отслеживала изменчивость в состоянии. Априорная ошибка оценивает ковариацию, P−, установлен в ковариацию шума процесса, Q, определенный во время предыдущей итерации. Q вычисляется в зависимости от по опыту ошибочная оценочная ковариация, P+. При вычислении Q это принято, что термины взаимной корреляции незначительны по сравнению с терминами автокорреляции и обнуляются:
где
P+ – обновленный (по опыту) ошибочная оценочная ковариация
κ – Фактор децимации разделен на частоту дискретизации.
β – Шум дрейфа гироскопа.
η – Шум гироскопа.
ν – Линейный ускоряющий фактор затухания.
ξ – Линейный ускоряющий шум.
σ – Магнитный фактор затухания воздействия.
γ – Магнитный шум воздействия.
Матрица усиления Кальмана 12 6, матрица раньше взвешивала инновации. В этом алгоритме инновации интерпретированы как ошибочный процесс, z.
Матрица усиления Кальмана создается как:
где
P− – предсказанная ошибочная ковариация
H модель наблюдения
S инновационная ковариация
Следующая ошибочная оценка определяется путем объединения матрицы усиления Кальмана с ошибкой в силе тяжести векторные и магнитные векторные оценки:
Если магнитный затор обнаруживается в текущей итерации, магнитный векторный сигнал ошибки проигнорирован, и, следующая ошибочная оценка вычисляется как:
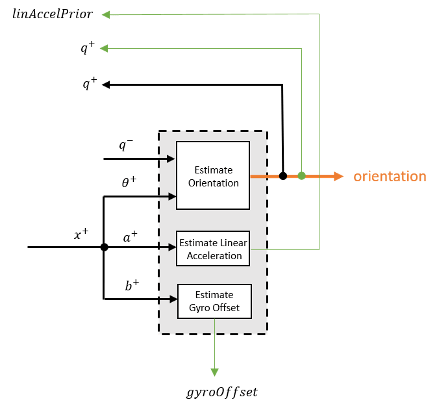
Оценка ориентации обновляется путем умножения предыдущей оценки ошибкой:
Линейная ускоряющая оценка обновляется путем затухания линейной ускоряющей оценки от предыдущей итерации и вычитания ошибки:
где
ν – Линейный ускоряющий фактор затухания
Оценка смещения гироскопа обновляется путем вычитания ошибки смещения гироскопа из смещения гироскопа от предыдущей итерации:
[1] Cочетание датчиков С открытым исходным кодом. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
[2] Roetenberg, D., Х.Дж. Линдж, C.T.M. Baten и П.Х. Велтинк. "Компенсация Магнитных Воздействий Улучшает Инерционное и Магнитное Обнаружение Ориентации Сегмента Человеческого тела". Транзакции IEEE в Нейронных Системах и Разработке Реабилитации. Издание 13. Выпуск 3, 2005, стр 395-405.
ahrsfilter | ecompass | imufilter | imuSensor | gpsSensor | quaternion

