Оцените модель в пространстве состояний, использующую время или данные о частоте в Live Editor
Добавить Оценочную задачу Модели в пространстве состояний в live скрипт в редакторе MATLAB:
На вкладке Live Editor выберите Task > Estimate State-Space Model.
В блоке кода в вашем скрипте введите соответствующее ключевое слово, такое как state, space, или estimate. Выберите Estimate State Space Model от предложенных завершений команды.
Используйте Оценочный Live Editor Модели в пространстве состояний Тэска, чтобы оценить модель в пространстве состояний и сравнить выход модели с данными об измерении.
Откройте этот пример, чтобы видеть, что предварительно сконфигурированный скрипт содержит задачу.
Настройте данные
Загрузите данные об измерении iddata1 в ваше рабочее пространство MATLAB.
load iddata1 z1 z1
z1 =
Time domain data set with 300 samples.
Sample time: 0.1 seconds
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
Импортируйте данные в задачу
В Избранном разделе данных, Типе данных набора к Data Object и Объект Оценки набора к z1.

Объект данных содержит имена переменных ввода и вывода, а также шаг расчета, таким образом, вы не должны задавать их.
Оцените модель Используя настройки по умолчанию
Исследуйте структуру модели и дополнительные параметры.

В Задавать разделе структуры модели порядок объекта устанавливается к его значению по умолчанию 4 и модель находится в области непрерывного времени. Уравнения ниже параметров в этом разделе отображают заданную структуру.
В Задавании дополнительного раздела параметров параметры отображают опции по умолчанию для оценки пространства состояний.
Выполните задачу от Запуска использования вкладки Live Editor. График отображает данные об оценке, предполагаемый выход модели и подходящий процент.

Экспериментируйте с установками параметров
Экспериментируйте с установками параметров и смотрите, как они влияют на подгонку.
Например, в Задают структуру модели, Оценочное поле воздействия выбрано, таким образом, матрица K воздействия присутствует в уравнениях. Если вы очищаете поле, термин K исчезает. Запустите обновленную настройку и смотрите, как подгонка изменяется.


Измените настройки Plant Order, чтобы Выбрать оптимальное значение в области значений. Настройкой по умолчанию является 1:10.

Когда вы запускаете модель, график Выбора Порядка Модели отображает вклад каждого состояния к динамическому поведению модели. С начальными настройками задачи для других параметров график отображает рекомендацию 2 для порядка модели.

Примите эту рекомендацию путем нажатия на Apply и смотрите, как это изменение влияет на подгонку.

Сгенерируйте код
Чтобы отобразить код, который генерирует задача, щелкните![]() в нижней части раздела параметра. Код, который вы видите, отражает текущую настройку параметра задачи.
в нижней части раздела параметра. Код, который вы видите, отражает текущую настройку параметра задачи.

Используйте отдельные данные об оценке и валидации так, чтобы можно было подтвердить предполагаемую модель в пространстве состояний.
Откройте этот пример, чтобы видеть, что предварительно сконфигурированный скрипт содержит задачу.
Настройте данные
Загрузите данные об измерении iddata1 в ваше рабочее пространство MATLAB и исследуют его содержимое.
load iddata1 z1 z1
z1 =
Time domain data set with 300 samples.
Sample time: 0.1 seconds
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
Извлеките измерения ввода и вывода.
u = z1.u; y = z1.y;
Разделите данные в два набора с одной половиной для оценки и одной половиной для валидации. Исходный набор данных имеет 300 выборок, таким образом, каждый новый набор данных имеет 150 выборок.
u_est = u(1:150); u_val = u(151:300); y_est = y(1:150); y_val = y(151:300);
Импортируйте данные в задачу
В Избранном разделе данных, Типе данных набора к Time. Установите шаг расчета на 0.1 секунды, который является шагом расчета в исходном iddata объект z1. Выберите соответствующие наборы данных для оценки и валидации.

Оцените и подтвердите модель
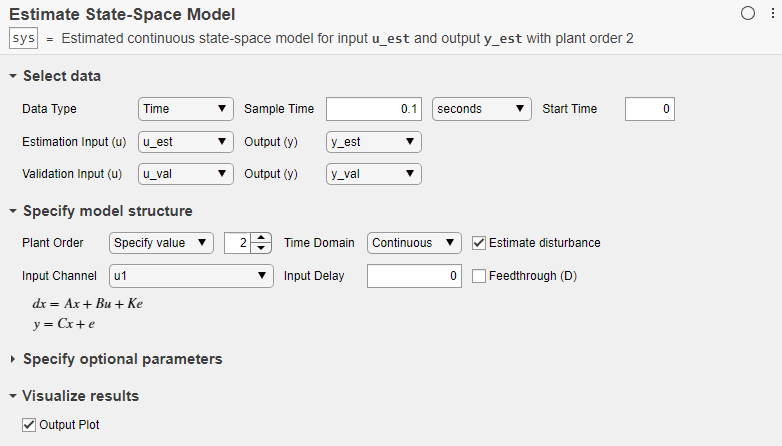
Оценочная Модель в пространстве состояний в качестве примера с Live Editor Тэском рекомендует порядок модели 2. Используйте то значение для Порядка Объекта. Оставьте другие параметры в их значениях по умолчанию. Обратите внимание на то, что Входной Канал относится не к набору входных данных, но к индексу канала в наборе входных данных, который для системы одно входа всегда является u1.

Выполните задачу от Запуска использования вкладки Live Editor. Выполнение задачи создает два графика. Первый график показывает результаты оценки, и второй график показывает результаты валидации.

Подгонка к данным об оценке несколько хуже, чем в Оценочной Модели в пространстве состояний с Live Editor Тэском. Оценка текущий пример имеет только половину данных, с которыми можно оценить модель. Подгонка к данным о валидации, которые представляют совершенство модели в более общем плане, лучше, чем подгонка к данным об оценке.
Data Type — Тип данных для входных и выходных данныхTime (значение по умолчанию) | Frequency | Data ObjectЗадача принимает числовые значения измерения, которые однородно производятся вовремя. Сигналы ввода и вывода могут содержать несколько каналов. Данные могут быть упакованы как числовые массивы (для Time или Frequency) или в объекте данных, такой как iddata или idfrd объект.
Тип данных, который вы выбираете, определяет, необходимо ли задать дополнительные параметры.
Time — Задайте Sample Time и Start Time в единицах измерения времени, которые вы выбираете.
Frequency — Задайте Frequency путем выбора имени переменной вектора частоты в рабочем пространстве MATLAB. Задайте модули для этого вектора частоты. Задайте Sample Time в секундах.
Data Object — Не задайте дополнительные параметры, потому что объект данных уже содержит информацию вовремя или выборку частоты.
Estimation Input (u) and Estimation Output (y) — Имена переменных входных и выходных данных для оценкиВыберите имена переменных ввода и вывода из выбора рабочего пространства MATLAB. Используйте эти параметры, когда Data Type будет Time или Frequency.
Estimation Object — Имя переменной объекта данных, содержащего входные и выходные данные для оценкиВыберите имя переменной объекта данных из выбора рабочего пространства MATLAB. Используйте этот параметр, когда Data Type будет Data Object.
Validation Input (u) and Validation Output (y) — Имена переменных входных и выходных данных для валидацииВыберите имена переменных ввода и вывода из выбора рабочей области. Используйте эти параметры, когда Data Type будет Time или Frequency. Определение данных о валидации является дополнительным, но рекомендовано.
Validation Object — Имя переменной объекта данных, содержащего входные и выходные данные для валидацииВыберите имя переменной объекта данных из выбора рабочего пространства MATLAB. Используйте этот параметр, когда Data Type будет Data Object. Определение данных о валидации является дополнительным, но рекомендовано.
Plant Order — Порядок модели оценитьЗадача позволяет вам задавать одно значение или область значений значений для порядка модели оценить.
Specify value — Задайте порядок модели явным образом.
Pick best value in range — Укажите диапазон значений, таких как 1:10. Когда вы запускаете задачу, график сингулярного значения Ганкеля визуализирует относительный энергетический вклад каждого состояния в предполагаемой модели и рекомендует самое низкоуровневое, которое воспроизводит критическое динамическое поведение. Возобновите эту рекомендацию или выберите другой порядок в Chosen Order. Нажмите Apply, чтобы принять порядок модели и продолжить.
Time Domain — Область непрерывного или дискретного времениContinuous (значение по умолчанию) | DiscreteВыберите модель непрерывного времени или дискретного времени.
Estimate Disturbance — Включайте воздействие в модель оценкиВыберите эту опцию, чтобы оценить возмущение. Когда вы выбираете эту опцию, уравнения модели обновляются, чтобы показать матрицу K и термин e.
Input Channel — Установите входную задержку канала и проходные опцииДля каждого входного канала присвойте значения для Input Delay и Feedthrough.
Input Channel — Выберите входной канал. Входной канал всегда имеет форму ui, где i является i th канал входа u.
Input Delay — Введите входную задержку количества отсчетов (модель дискретного времени) или количество единиц измерения времени (модель непрерывного времени) для канала. Например, чтобы задать 0,2 вторых входа задерживаются для системы непрерывного времени, для которой единицей измерения времени является milliseconds, введите 200.
Feedthrough — Выберите эту опцию, чтобы оценить, что сквозное соединение канала от входа выводит. Когда вы выбираете эту опцию, уравнения модели обновляются, чтобы показать термин Du.
Fit Focus — Минимизируйте ошибку предсказания или ошибку симуляцииPrediction (значение по умолчанию) | SimulationПодходящее особое внимание задает что ошибку минимизировать в функции потерь во время оценки.
Prediction — Минимизируйте ошибку предсказания "один шаг вперед" между измеренными и предсказанными выходными параметрами. Этот подход оценки фокусируется на создании хорошей модели предиктора для вводов и выводов оценки. Особое внимание предсказания обычно приводит к лучшим результатам оценки, потому что оно использует оба измерения ввода и вывода, таким образом составляя воздействия.
Simulation — Минимизируйте ошибку между измеренными и симулированными выходными параметрами. Этот подход оценки фокусируется на создании симулированного ответа модели, который имеет подходящий вариант для вводов и выводов оценки. Особое внимание симуляции является обычно лучшим для валидации, особенно с наборами данных, не используемыми для исходной оценки.
Initial Conditions — Обработка начальных состоянийAuto (значение по умолчанию) | Zero | Estimate | BackcastУстановите эту опцию, когда это необходимо, выбирать определенный метод для инициализации состояний модели. С настройкой по умолчанию Auto, программное обеспечение выбирает метод на основе данных об оценке. Выбор:
Zero — Начальное состояние обнуляется.
Estimate — Начальное состояние обработано как независимый параметр оценки.
Backcast — Начальное состояние оценивается с помощью лучшего метода наименьших квадратов.
Input Intersampling — Межвыборка поведения для входного сигналаZero-order hold (значение по умолчанию) | Triangle approximation | Band-limitedВходная межвыборка является свойством входных данных. Задача использует это свойство при оценке непрерывных моделей. Задайте Input Intersampling, когда вашим типом данных будет Time или Frequency. Если вы используете iddata объект, объект уже содержит информацию о межвыборке. Выбор для этого свойства:
Zero-order hold — Кусочно-постоянный входной сигнал между выборками
Triangle approximation — Кусочно-линейный входной сигнал между выборками, также известными как хранение первого порядка
Band-limited — Входной сигнал имеет нулевую силу выше частоты Найквиста
Search Method — Числовой режим поиска для итеративной оценки параметраAuto (значение по умолчанию) | Gauss-Newton | Adaptive Gauss-Newton | Levenberg-Marquardt | Gradient Search
Auto — Для каждой итерации программное обеспечение циклически повторяется через методы, пока это не находит первый спуск направления, который приводит к сокращению стоимости оценки.
Gauss-Newton — Поиск наименьших квадратов Ньютона Гаусса подпространства.
Levenberg-Marquardt — Поиск наименьших квадратов Levenberg-Marquardt.
Adaptive Gauss-Newton — Адаптивный поиск Ньютона Гаусса подпространства.
Gradient Search — Поиск наименьших квадратов наискорейшего спуска.
Max. Iterations — Максимальное количество итераций во время ошибочной минимизацииОпределите максимальный номер итераций во время ошибочной минимизации. Итерации останавливаются, когда Max. Iterations достигнут, или другому критерию остановки удовлетворяют, такие как Tolerance.
Tolerance — Минимальный процент ожидаемого улучшения по ошибкеКогда процент ожидаемого улучшения меньше Tolerance, остановки итераций.
Weighting Prefilter — Взвешивание предварительного фильтра для функции потерьNo filter (значение по умолчанию) | Passband(s) | LTI Filter | Frequency weights vector | Inverse of magnitude of the frequency response | Inverse of square root of magnitude of the frequency responseУстановите эту опцию, когда это необходимо, применять предварительный фильтр взвешивания к функции потерь, которую минимизирует задача, когда вы оцениваете модель. Когда вы выбираете опцию, необходимо также выбрать связанную переменную в рабочей области, которая содержит информацию о фильтре. Доступные параметры зависят от области данных.
| Взвешивание предварительного фильтра | Область данных | Отфильтруйте информацию |
|---|---|---|
No Filter | Время и частота | |
Passbands | Время и частота | Полоса пропускания располагается в виде вектора 1 на 2 строки или n-by-2 матрица, где n является количеством полос пропускания. |
LTI Filter | Время и частота | Модель SISO LTI. |
Frequency Weights Vector | Частота | Веса частоты в виде вектор-столбца с той же длиной как вектор частоты. |
Inverse of magnitude of the frequency response | Частотная характеристика | Фильтр взвешивания, где G (ω) является комплексными данными частотной характеристики. SISO и системы SIMO только. |
Inverse of square root of magnitude of the frequency response | Частотная характеристика | Фильтр взвешивания . SISO и системы SIMO только. |
Например, предположите, что вы выполняете оценку с данными частотной области SISO и что в вашем рабочем пространстве MATLAB, у вас есть вектор-столбец W это содержит веса частоты для предварительного фильтра. В задаче выберите Weighting prefilter > Frequency weights vector и переменную W.
Output Plot — Постройте сравнение модели, и измерил выходные параметрыПостройте сравнение выхода модели и исходных результатов измерений, наряду с подходящим процентом. Если у вас есть отдельные данные о валидации, второй график сравнивает ответ модели на входные данные валидации с измеренным выходом от набора данных валидации.
