Вычислите 2D интегральное изображение
В integral image каждый пиксель представляет совокупную сумму соответствующего входного пикселя со всеми пикселями выше и слева от входного пикселя.
Интегральное изображение позволяет вам быстро вычислить суммирование по подобластям изображений. Суммирование подобласти может быть вычислено в постоянное время как линейная комбинация только четырех пикселей в интегральном изображении, независимо от размера подобласти. Использование интегральных изображений было популяризировано алгоритмом Виолы - Джонса [1].
Создайте матрицу простой выборки.
I = magic(5)
I = 5×5
17 24 1 8 15
23 5 7 14 16
4 6 13 20 22
10 12 19 21 3
11 18 25 2 9
Вычислите интегральное изображение демонстрационной матрицы. Эти шаги показывают как первые несколько значений в исходной матричной карте к значениям в интегральном изображении. Обратите внимание на то, что пиксель с (строка, столбец) координата (r, c) в оригинальном изображении соответствует пикселю с координатой (r+1, c+1) в интегральном изображении.
Первой строкой и столбцом в интегральном изображении является весь 0s.
Пиксель в исходной матрице в координате (1, 1) со значением 17 неизменен в интегральном изображении, потому что нет никаких других пикселей в суммировании. Поэтому пиксель в интегральном изображении в координате (2, 2) имеет значение 17.
Пиксель в исходной матрице в координате (1, 2) сопоставляет с пикселем (2, 3) в интегральном изображении. Значение является суммированием исходного пиксельного значения (24), пикселей выше его (0) и пикселей с его левой стороны от него (17): 24 + 17 + 0 = 41.
Пиксель в исходной матрице в координате (1, 3) сопоставляет с пикселем (2, 4) в интегральном изображении. Значение является суммированием исходного пиксельного значения (1), пикселя выше его (0) и пикселей с его левой стороны от него (которые были уже суммированы к 41). Таким образом значение на уровне пикселя (2,4) в интегральном изображении равняется 1 + 41 + 0 = 42.
J = integralImage(I)
J = 6×6
0 0 0 0 0 0
0 17 41 42 50 65
0 40 69 77 99 130
0 44 79 100 142 195
0 54 101 141 204 260
0 65 130 195 260 325
Считайте полутоновое изображение в рабочую область. Отобразите изображение.
I = imread('pout.tif');
imshow(I)
Вычислите интегральное изображение.
J = integralImage(I);
Используйте drawrectangle инструмент, чтобы выбрать прямоугольную подобласть. Инструмент возвращает Rectangle объект.
d = drawrectangle;

Vertices свойство Rectangle объектно-ориентированная память координаты вершин как 4 2 матрица. Вершины упорядочены начиная с верхнего левого и продолжающегося в направлении по часовой стрелке. Разделите матрицу в два вектора, содержащие координаты строки и столбца. Поскольку интегральное изображение дополнено нулем на главной и левой стороне, постепенно увеличьте координаты строки и столбца 1, чтобы получить соответствующие элементы интегрального массива.
r = floor(d.Vertices(:,2)) + 1; c = floor(d.Vertices(:,1)) + 1;
Вычислите сумму всех пикселей в прямоугольной подобласти путем объединения четырех пикселей интегрального изображения.
regionSum = J(r(1),c(1)) - J(r(2),c(2)) + J(r(3),c(3)) - J(r(4),c(4))
regionSum = 613092
Создайте матрицу простой выборки.
I = magic(5)
I = 5×5
17 24 1 8 15
23 5 7 14 16
4 6 13 20 22
10 12 19 21 3
11 18 25 2 9
Создайте интегральное изображение с вращаемой ориентацией.
J = integralImage(I,'rotated')J = 6×7
0 0 0 0 0 0 0
0 17 24 1 8 15 0
17 64 47 40 38 39 15
64 74 91 104 105 76 39
74 105 149 188 183 130 76
105 170 232 272 236 195 130
Задайте вращаемую прямоугольную подобласть. Этот пример задает подобласть с верхним углом в координате (1,3) в оригинальном изображении. Подобласть имеет вращаемую высоту 1 и ширину 2.
r = 1; c = 3; h = 1; w = 2;
Получите значение четырех угловых пикселей подобласти в интегральном изображении.
regionBottom = J(r+w+h,c-h+w+1); regionTop = J(r,c+1); regionLeft = J(r+h,c-h+1); regionRight = J(r+w,c+w+1); regionCorners = [regionBottom regionTop regionLeft regionRight]
regionCorners = 1×4
105 0 24 39
Вычислите сумму пикселей в подобласти путем подведения итогов четырех угловых пиксельных значений.
regionSum = regionBottom + regionTop - regionLeft - regionRight
regionSum = 42
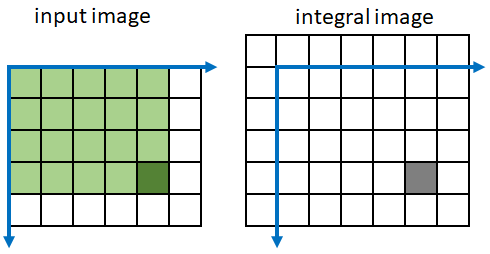
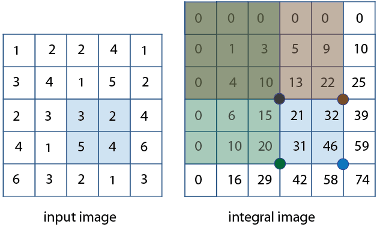
Каждый пиксель в интегральном изображении представляет суммирование соответствующего значения входного пикселя со всеми входными пикселями выше и слева от входного пикселя. Поскольку integralImage нулевые клавиатуры получившееся интегральное изображение, пиксель с (строка, столбец) координата (mN) в оригинальном изображении сопоставляет с пикселем с координатой (m+1, n+1) в интегральном изображении.
На рисунке текущий пиксель во входном изображении является темно-зеленым пикселем в координате (4, 5). Все пиксели во входном изображении выше и слева от входного пикселя окрашены светло-зеленые. Суммирование зеленых пиксельных значений возвращено в интегральном пикселе изображения с координатой (5, 6), раскрашено серое.
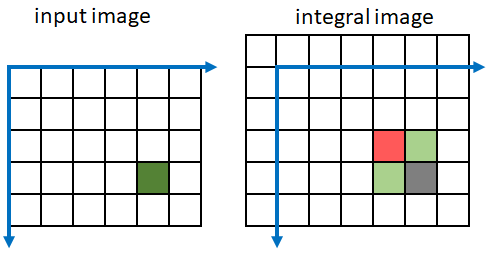
integralImage выполняет более быстрый расчет интегрального изображения путем подведения итогов пиксельных значений и во входном изображении и в интегральном изображении. Пиксель (mN) в интегральном изображении J линейная комбинация только четырех пикселей: один от входного изображения и трех ранее вычисленных пикселей от интегрального изображения.
J(m,n) = J(m,n-1) + J(m-1,n) + I(m-1,n-1) - J(m-1,n-1)
Этот рисунок показывает, какие пиксели включены в сумму при вычислении интегрального изображения на уровне серого пикселя. Зеленые пиксели добавляют к сумме, и красные пиксели вычитают из суммы.
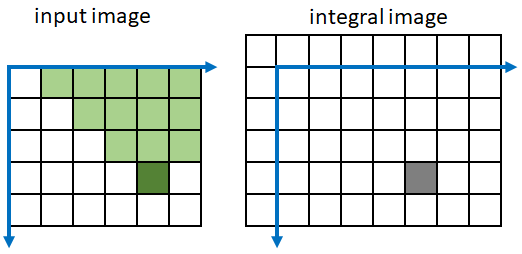
Если вы задаете изображение orientation как 'rotated', затем пиксели в интегральном изображении представляют суммирование соответствующего значения входного пикселя со всеми входными пикселями, которые являются по диагонали выше входного пикселя. integralImage выполняет суммирование вдоль диагональных линий. Этот подход менее в вычислительном отношении интенсивен, чем вращение изображения и вычисление интегрального изображения в прямолинейных направлениях.
На рисунке текущий пиксель во входном изображении является темно-зеленым пикселем в координате (4, 5). Все пиксели во входном изображении по диагонали выше входного пикселя окрашены светло-зеленые. Суммирование зеленых пиксельных значений возвращено в интегральном пикселе изображения с координатой (5, 6), раскрашено серое.
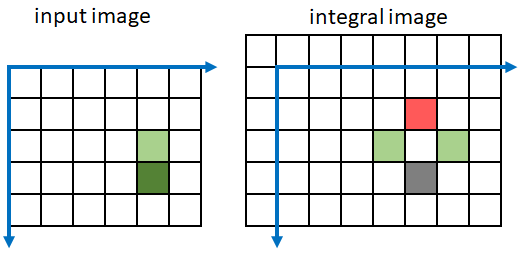
integralImage выполняет более быстрый расчет вращаемого интегрального изображения путем подведения итогов пиксельных значений и во входном изображении и в интегральном изображении. Пиксель (mN) в интегральном изображении J линейная комбинация только пяти пикселей: два от входного изображения и трех ранее вычисленных пикселей от интегрального изображения:
J(m,n) = J(m-1,n-1) + J(m-1,n+1) - J(m-2,n) + I(m-1,n-1) + I(m-2,n-1)
Этот рисунок показывает, какие пиксели включены в сумму при вычислении интегрального изображения на уровне серого пикселя. Зеленые пиксели добавляют к сумме, и красные пиксели вычитают из суммы.
Подобласть в вертикальной ориентации с верхней левой координатой (mN), высота h, и ширина w в оригинальном изображении имеет суммирование:
regionSum = J(m–1,n–1) + J(m+h–1,n+w–1) – J(m+h–1,n–1) – J(m-1,n+w-1)
Например, во входном изображении ниже, суммирование синей теневой области: 46 – 22 – 20 + 10 = 14. Вычисление вычитает области выше и слева от теневой области. Область перекрытия добавляется назад, чтобы компенсировать двойное вычитание.
Подобласть во вращаемой ориентации использует различное определение высоты и ширины [2]. Суммирование области:
regionSum = J(m+h+w,n-h+w+1) + J(m,n+1) - J(m+h,n-h+1) - J(m+w,n+w+1)
[1] Виола, P. и М. Дж. Джонс. "Быстрое Обнаружение объектов с помощью Повышенного Каскада Простых Функций". Продолжения 2 001 Конференции Общества эпохи компьютеризации IEEE по Компьютерному зрению и Распознаванию образов. 2001. Издание 1, стр 511–518.
[2] Lienhart, R. и Дж. Майдт. "Расширенный набор подобных Хаару Функций Быстрого Обнаружения объектов". Продолжения 2 002 Международных конференций IEEE по вопросам Обработки изображений. Сентябрь 2002. Издание 1, стр 900–903.
