Симулируйте показания датчика GPS с шумом
UAV Toolbox / Сценарий UAV и Моделирование Датчика
Navigation Toolbox / Расположение Мультидатчика / Модели Датчика
Sensor Fusion and Tracking Toolbox / Расположение Мультидатчика / Модели Датчика
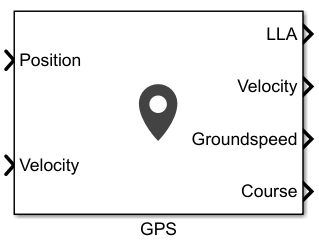
Блок выходные параметры поврежденные шумом измерения GPS на основе входного положения и скорости в системе координат локальной координаты или геодезической системе координат. Это использует наземную модель WGS84, чтобы преобразовать локальные координаты в координаты LLA высоты долготы широты.
Position — Положение GPS-приемника в системе координат навигацииЗадайте входное положение GPS-приемника в системе координат навигации как действительный, конечный N-by-3 матрица. N является количеством отсчетов в текущей системе координат. Формат строк матрицы отличается в зависимости от значения параметра формата ввода Положения.
Если значением параметра Position input format является Local, задайте каждую строку Position как Декартовы координаты в метрах относительно локальной системы координат навигации, заданной параметром Системы координат, с источником, заданным Ссылочным параметром положения.
Если значением параметра Position input format является Geodetic, задайте каждую строку входа Position как геодезические координаты формы [latitude longitude altitude]. Значения latitude и longitude в градусах. Altitude высота выше модели эллипсоида WGS84 в метрах.
Типы данных: single | double
Velocity — Скорость в локальной системе координат навигации (m/s)Задайте входную скорость GPS-приемника в системе координат навигации в метрах в секунду как действительный, конечный N-by-3 матрица. N является количеством отсчетов в текущей системе координат. Формат строк матрицы отличается в зависимости от значения параметра формата ввода Положения.
Если значением параметра Position input format является Local, задайте каждую строку Velocity относительно локальной системы координат навигации (NED или ENU), заданный параметром Системы координат, с источником, заданным Ссылочным параметром положения.
Если значением параметра Position input format является Geodetic, задайте каждую строку Velocity относительно системы координат навигации (NED или ENU), заданный параметром Reference frame, с источником, заданным Положением.
Типы данных: single | double
LLA — Положение в системе координат LLAПоложение GPS-приемника в геодезической широте, долготе, и высоте (LLA) система координат, возвратилось как действительный, конечный N-by-3 массив. Широта и долгота в градусах с Севером и Востоком, являющимся положительным. Высота исчисляется в метрах.
N является количеством отсчетов в текущей системе координат.
Типы данных: single | double
Velocity — Скорость в локальной системе координат навигации (m/s)Скорость GPS-приемника в локальной системе координат навигации в метрах в секунду, возвращенный как действительный, конечный N-by-3 матрица. N является количеством отсчетов в текущей системе координат. Формат строк матрицы отличается в зависимости от значения параметра формата ввода Положения.
Если значением параметра Position input format является Local, Velocity выход относительно локальной системы координат навигации (NED или ENU), задан параметром Системы координат, с источником, заданным Ссылочным параметром положения.
Если значением параметра Position input format является Geodetic, Velocity выход относительно системы координат навигации (NED или ENU), задан параметром Reference frame, с источником, заданным LLA.
Типы данных: single | double
Groundspeed — Величина горизонтальной скорости в локальной системе координат навигации (m/s)Величина горизонтальной скорости GPS-приемника в локальной системе координат навигации в метрах в секунду, возвращенный как действительный, конечный N - вектор-столбец элемента.
N является количеством отсчетов в текущей системе координат.
Типы данных: single | double
Course — Направление горизонтальной скорости в локальной системе координат навигации (°)Направление горизонтальной скорости GPS-приемника в локальной системе координат навигации, в градусах, возвращенный как действительный, конечный N - вектор-столбец элемента значений от 0 до 360. Север соответствует 0 градусам, и Восток соответствует 90 градусам.
N является количеством отсчетов в текущей системе координат.
Типы данных: single | double
Reference frame — Система координатNED (значение по умолчанию) | ENUЗадайте систему координат как NED (Северо-восток вниз) или ENU(Восточный Север).
Position input format — Формат ввода координаты положенияLocal (значение по умолчанию) | GeodeticЗадайте формат ввода координаты положения как Local или Geodetic.
Если вы устанавливаете этот параметр на Local, затем вход к порту Position должен быть в форме Декартовых координат относительно локальной системы координат навигации, заданной параметром Reference Frame, с источником, зафиксированным и заданным параметром Reference location. Вход к Скоростному входному порту должен также быть относительно этой локальной системы координат навигации.
Если вы устанавливаете этот параметр на Geodetic, затем вход к порту Position должен быть геодезическими координатами в [latitude longitude altitude]. Вход к входному порту Velocity должен также быть относительно системы координат навигации, заданной параметром Reference frame с источником, соответствующим порту Position.
Reference location — Источник локальной системы координат навигацииЗадайте источник системы координат локальной ссылки как трехэлементный вектор-строка в геодезических координатах [latitude longitude altitude], где altitude высота выше модели WGS84 опорного эллипсоида. Ссылочные значения местоположения в градусах, степени и метры, соответственно. Формат степени является десятичными градусами (DD).
Чтобы включить этот параметр, установите параметр формата ввода Положения на Local.
Horizontal position accuracy — Горизонтальная точность положения (m)Задайте горизонтальную точность положения как неотрицательный действительный скаляр в метрах. Горизонтальная точность положения задает стандартное отклонение шума в горизонтальном измерении положения. Увеличение этого значения добавляет шум в измерение, уменьшая его точность.
Настраиваемый: да
Vertical position accuracy — Точность вертикального положения (m)Задайте точность вертикального положения как неотрицательный действительный скаляр в метрах. Точность вертикального положения задает стандартное отклонение шума в измерении вертикального положения. Увеличение этого значения добавляет шум в измерение, уменьшая его точность.
Настраиваемый: да
Velocity accuracy — Скоростная точность (m/s)Задайте скоростную точность в секунду как неотрицательный действительный скаляр в метрах. Скоростная точность задает стандартное отклонение шума в скоростном измерении. Увеличение этого значения добавляет шум в измерение, уменьшая его точность.
Настраиваемый: да
Decay factor — Глобальный шум положения затухает факторЗадайте глобальный фактор затухания шума положения в виде числа в области значений [0, 1]. Фактор затухания 0 моделирует глобальный шум положения как процесс белого шума. Фактор затухания 1 моделирует глобальный шум положения как случайный процесс обхода.
Настраиваемый: да
Seed — Начальный seedЗадайте начальный seed mt19937ar алгоритма генератора случайных чисел как неотрицательное целое число.
Simulate using — Тип симуляции, чтобы запуститьсяInterpreted execution (значение по умолчанию) | Code generationВыберите тип симуляции, чтобы запуститься из этих опций:
Interpreted execution — Симулируйте модель с помощью MATLAB® интерпретатор. Для получения дополнительной информации смотрите Режимы Симуляции.
Code generation — Симулируйте модель с помощью сгенерированного кода C. В первый раз вы запускаете симуляцию, Simulink® генерирует код С для блока. Код С снова используется для последующих симуляций, пока модель не изменяется.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.

