Отобразите движение радаров и целей
phased.ScenarioViewer Система object™ создает 3-D средство просмотра, чтобы отобразить движение радаров и целей, которые вы моделируете в своей радарной симуляции. Можно отобразить текущие положения и скорости, объектные дорожки, положение и аннотации скорости, радарные направления луча и другие параметры объекта. Можно изменить радарные функции, такие как область значений луча и излучить ширину во время симуляции. Можно использовать phased.Platform Системный объект к перемещению модели возражает, или можно предоставить собственные динамические модели.
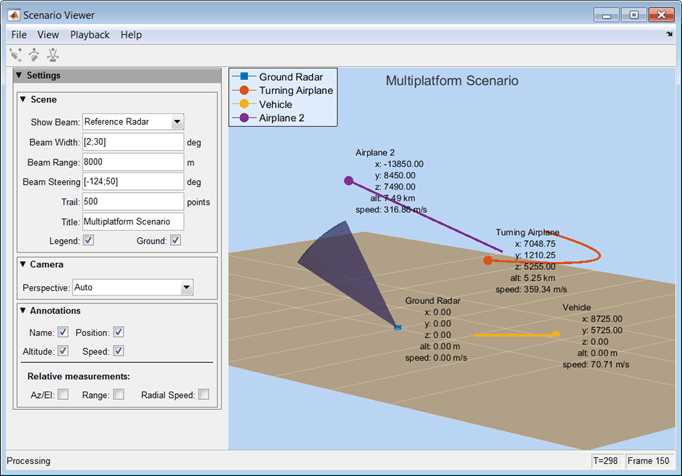
Этот рисунок показывает сценарий с четырьмя объектами, состоящий из наземного радара, двух самолетов и наземного транспортного средства. Можно просмотреть код, который сгенерировал этот рисунок в Визуализировании Многоплатформенного примера Сценария.
Создать средство просмотра сценария:
Задайте и настройте phased.ScenarioViewer Системный объект. Смотрите Конструкцию. Можно установить свойства Системного объекта во время создания или оставить их их значениям по умолчанию. Некоторые свойства, которые вы устанавливаете во время создания, могут быть изменены позже. Эти свойства являются настраиваемыми.
Вызовите step метод, чтобы обновить радар и цель отобразил положения согласно свойствам phased.ScenarioViewer Системный объект. Можно изменить настраиваемые свойства в любое время.
Примечание
Запуск в R2016b, вместо того, чтобы использовать step метод, чтобы выполнить операцию, заданную Системным объектом, можно вызвать объект с аргументами, как будто это была функция. Например, y = step(obj,x) и y = obj(x) выполните эквивалентные операции.
sIS = phased.ScenarioViewersIS наличие значений свойств по умолчанию.
sIS = phased.ScenarioViewer(Name,Value)sIS, с любым заданным свойством Name установите на заданный ValueИмя должен появиться в одинарных кавычках (''). Можно задать несколько аргументов пары "имя-значение" в любом порядке как Name1,Value1,...,NameN,ValueN.
| скрыться | Скройте окно средства просмотра сценария |
| сброс | Сбросьте состояние Системного объекта |
| show | Покажите окно средства просмотра сценария |
| шаг | Обновите отображение средства просмотра сценария |
| Характерный для всех системных объектов | |
|---|---|
release | Позвольте изменения значения свойства Системного объекта |
Визуализируйте дорожки радара и одной цели самолета. Радар является стационарным, и самолет перемещается в прямую линию. Обеспечьте радарный луч, указывающий на самолет.
Создайте радар и платформную систему самолета objects™. Установите частоту обновления на 0,1 с.
updateRate = 0.1; radarPlatform = phased.Platform(... 'InitialPosition',[0;0;10], ... 'Velocity',[0;0;0]); airplanePlatforms = phased.Platform(... 'InitialPosition',[5000.0;3500.0;6000.0],... 'Velocity',[-300;0;0]);
Создайте phased.ScenarioViewer Системный объект. Покажите, что радар излучает и аннотирует дорожки положением, скоростью и высотой.
sSV = phased.ScenarioViewer('BeamRange',5000.0,'UpdateRate',updateRate,... 'PlatformNames',{'Ground Radar','Airplane'},'ShowPosition',true,... 'ShowSpeed',true,'ShowAltitude',true,'ShowLegend',true);
Запустите сценарий. На каждом шаге вычислите угол к цели. Используйте тот угол, чтобы регулировать радарный луч к цели.
for i = 1:100 [radar_pos,radar_vel] = step(radarPlatform,updateRate); [tgt_pos,tgt_vel] = step(airplanePlatforms,updateRate); [rng,ang] = rangeangle(tgt_pos,radar_pos); sSV.BeamSteering = ang; step(sSV,radar_pos,radar_vel,tgt_pos,tgt_vel); pause(0.1); end

Визуализируйте дорожки бортового радара и цели наземного транспортного средства. Бортовой радар несет беспилотник, летящий на высоте 5 км.
Создайте радар беспилотника и наземное транспортное средство с помощью phased.Platform Система objects™. Установите частоту обновления на 0,1 с.
updateRate = 0.1; drone = phased.Platform(... 'InitialPosition',[100;1000;5000], ... 'Velocity',[400;0;0]); vehicle = phased.Platform('MotionModel','Acceleration',... 'InitialPosition',[5000.0;3500.0;0.0],... 'InitialVelocity',[40;5;0],'Acceleration',[0.1;0.1;0]);
Создайте phased.ScenarioViewer Системный объект. Покажите, что радар излучает и аннотирует дорожки положением, скоростью и высотой.
viewer = phased.ScenarioViewer('BeamRange',8000.0,'BeamWidth',2,'UpdateRate',updateRate,... 'PlatformNames',{'Drone Radar','Vehicle'},'ShowPosition',true,... 'ShowSpeed',true,'ShowAltitude',true,'ShowLegend',true,'Title','Vehicle Tracking Radar');
Запустите сценарий. На каждом шаге вычислите угол к цели. Используйте тот угол, чтобы регулировать радарный луч к цели.
for i = 1:100 [radar_pos,radar_vel] = step(drone,updateRate); [tgt_pos,tgt_vel] = step(vehicle,updateRate); [rng,ang] = rangeangle(tgt_pos,radar_pos); viewer.BeamSteering = ang; viewer(radar_pos,radar_vel,tgt_pos,tgt_vel) pause(.1) end

В этом примере показано, как создать и отобразить многоплатформенный сценарий, содержащий наземный стационарный радар, поворачивающийся самолет, самолет постоянной скорости и движущееся наземное транспортное средство. Поворачивающийся самолет следует за параболическим углом тангажа при убывании на уровне 20 м/с.
Задайте частоту обновления сценария на уровне 0,5 Гц. Для 150 шагов длительность времени сценария составляет 300 с.
updateRate = 0.5; N = 150;
Настройте поворачивающийся самолет с помощью Acceleration модель phased.Platform Система object™. Задайте исходное положение самолета областью значений и азимутом от наземного радара и его вертикального изменения. Самолет в 10 км от радара в азимуте на 60 ° и имеет высоту 6 км. Самолет ускоряется на уровне 10 м/с ² в отрицательном направлении X.
airplane1range = 10.0e3; airplane1Azimuth = 60.0; airplane1alt = 6.0e3; airplane1Pos0 = [cosd(airplane1Azimuth)*airplane1range;... sind(airplane1Azimuth)*airplane1range;airplane1alt]; airplane1Vel0 = [400.0;-100.0;-20]; airplane1Accel = [-10.0;0.0;0.0]; airplane1platform = phased.Platform('MotionModel','Acceleration',... 'AccelerationSource','Input port','InitialPosition',airplane1Pos0,... 'InitialVelocity',airplane1Vel0,'OrientationAxesOutputPort',true,... 'InitialOrientationAxes',eye(3));
Настройте стационарный наземный радар в начале координат глобальной системы координат. Чтобы симулировать вращающийся радар, измените наземный радарный руководящий угол луча в цикле обработки.
groundRadarPos = [0,0,0]'; groundRadarVel = [0,0,0]'; groundradarplatform = phased.Platform('MotionModel','Velocity',... 'InitialPosition',groundRadarPos,'Velocity',groundRadarVel,... 'InitialOrientationAxes',eye(3));
Настройте наземное транспортное средство, чтобы переместиться в постоянную скорость.
groundVehiclePos = [5e3,2e3,0]'; groundVehicleVel = [50,50,0]'; groundvehicleplatform = phased.Platform('MotionModel','Velocity',... 'InitialPosition',groundVehiclePos,'Velocity',groundVehicleVel,... 'InitialOrientationAxes',eye(3));
Настройте второй самолет, чтобы также переместиться в постоянную скорость.
airplane2Pos = [8.5e3,1e3,6000]'; airplane2Vel = [-300,100,20]'; airplane2platform = phased.Platform('MotionModel','Velocity',... 'InitialPosition',airplane2Pos,'Velocity',airplane2Vel,... 'InitialOrientationAxes',eye(3));
Настройте средство просмотра сценария. Задайте радар как наличие области значений луча 8 км, вертикальной ширины луча 30 ° и горизонтальной ширины луча 2 °. Аннотируйте дорожки положением, скоростью, высотой и областью значений.
BeamSteering = [0;50]; viewer = phased.ScenarioViewer('BeamRange',8.0e3,'BeamWidth',[2;30],'UpdateRate',updateRate,... 'PlatformNames',{'Ground Radar','Turning Airplane','Vehicle','Airplane 2'},'ShowPosition',true,... 'ShowSpeed',true,'ShowAltitude',true,'ShowLegend',true,'ShowRange',true,... 'Title','Multiplatform Scenario','BeamSteering',BeamSteering);
Продвиньтесь через цикл обработки отображения, обновив радар и предназначайтесь для положений. Вращайте наземный радарный руководящий угол четырьмя градусами на каждом шаге.
for n = 1:N [groundRadarPos,groundRadarVel] = groundradarplatform(updateRate); [airplane1Pos,airplane1Vel,airplane1Axes] = airplane1platform(updateRate,airplane1Accel); [vehiclePos,vehicleVel] = groundvehicleplatform(updateRate); [airplane2Pos,airplane2Vel] = airplane2platform(updateRate); viewer(groundRadarPos,groundRadarVel,[airplane1Pos,vehiclePos,airplane2Pos],... [airplane1Vel,vehicleVel,airplane2Vel]); BeamSteering = viewer.BeamSteering(1); BeamSteering = mod(BeamSteering + 4,360.0); if BeamSteering > 180.0 BeamSteering = BeamSteering - 360.0; end viewer.BeamSteering(1) = BeamSteering; pause(0.2); end

