Этот пример показывает, как смоделировать изотермическую систему приведения в действие с помощью блоков Simscape™ Fluids™. Система состоит из насоса, который моделируется идеализированным источником давления, блоком управления, клапаном регулирования потока и механической загрузкой.

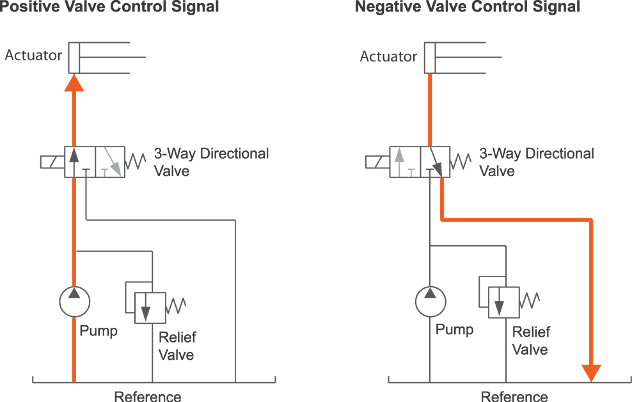
Блок управления представляет входящий сигнал для приведения в действие. Клапан с тремя путями представляет регулирование потока в привод. В зависимости от положения, полученного от блока управления, клапан с тремя путями позволяет жидкости вводить полость привода или перенаправляет его к среде ("Ссылка"). В блоке 3-Way Directional Valve (IL) существует один золотник, который регулирует два положения клапана - путь к потоку между портами P и A и путь к потоку между портами A и T. Изменение в положении золотника приводит к изменению в пути к потоку через клапан.
Положения распределительного клапана
В MATLAB® командная строка, войти ssc_new. MATLAB открывает шаблон модели Simscape. Этот шаблон обеспечивает начальную точку для вашей модели Simscape Fluids. Вы будете использовать блоки и из Основы Simscape и из библиотек продукта Simscape Fluids.
От вкладки Simulation нажмите на Library Browser. От библиотеки Simscape> Foundation Library> Isothermal Liquid> Utilities перетащите блок Isothermal Liquid Properties (IL) к холсту модели. Используйте этот блок, чтобы задать физические свойства сетевой жидкости, включая ее плотность, вязкость и модуль объемной упругости. Используйте блок Isothermal Liquid Predefined Properties (IL) из библиотеки Fluids> Isothermal Liquid> Utilities, чтобы выбрать жидкость с этими свойствами, уже заданными.
Соедините блок Solver Configuration с блоком Isothermal Liquid Properties (IL) как показано на рисунке. Блок Solver Configuration обеспечивает настройки решателя Simscape для вашей модели. Смотрите Подготовку Решателей для Физических Моделей для получения дополнительной информации о выборе решателя.
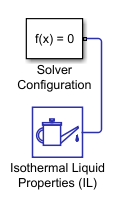
Каждая топологически отличная физическая сеть требует блока решателя.
От Simscape> Foundation Library, перетащите эти блоки к холсту модели.
| Блок | Подбиблиотека |
|---|---|
| Pressure Source (IL) | Isothermal Liquid> Sources |
| Reservoir (IL) | Isothermal Liquid> Elements |
В качестве альтернативы дважды кликните на холсте модели и введите имя блока. Нажмите на имя блока в выпадающем списке, который, кажется, добавляет блок в холст.
Задайте настройку модели в каждом диалоговом окне блока путем двойного клика на значке блока:
Источник давления представляет насос постоянного давления. В диалоговом окне блока Pressure Source (IL), набор Source type к Constant. Введите 10e5 Па для Pressure differential.
Резервуар устанавливает экологические граничные условия. В блоке Reservoir (IL), набор Reservoir pressure specification к Specified pressure и Reservoir pressure к 0.2 MPa.
От библиотеки Simscape> Fluids перетащите эти блоки к холсту модели.
| Блок | Подбиблиотека |
|---|---|
| Single-Acting Actuator (IL) | Isothermal Liquid> Actuators |
| 3-Way Directional Valve (IL) | Isothermal Liquid> Valves & Orifices> Directional Control Valves |
| Multiposition Valve Actuator | Isothermal Liquid> Valve Actuators |
| Pressure Relief Valve (IL) | Isothermal Liquid> Valves & Orifices> Pressure Control Valves |
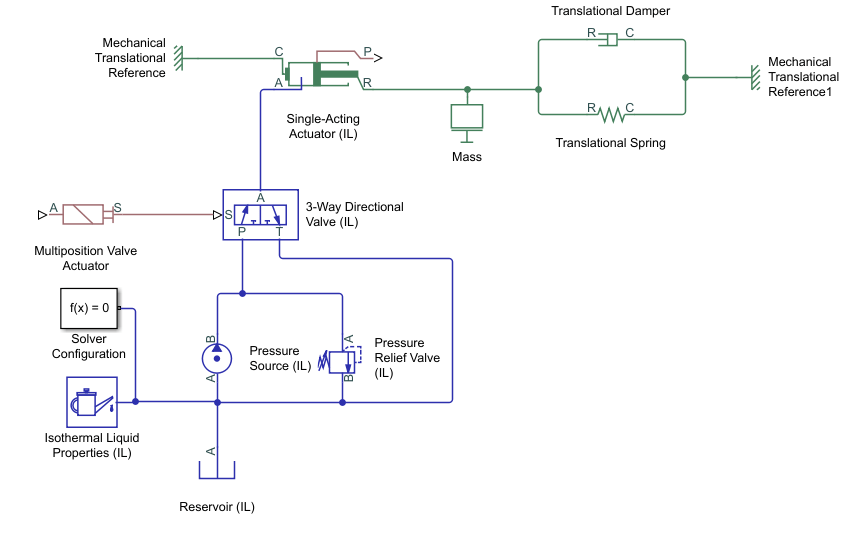
Привод преобразовывает энергию, произведенную источником давления в силу перевода. Распределительный клапан и привод клапана регулируют поток на привод.
Соедините блоки как показано на рисунке. Обратите внимание на то, что 3-Way Directional Valve (IL), Pressure Source (IL) и блоки Pressure Relief Valve (IL) основываются их связью с блоком Reservoir (IL).

Установите рабочие давления the Pressure Relief Valve (IL). В параметре Set pressure differential введите 50e5 Па. Это - давление, при котором клапан начинает открываться. В параметре Pressure regulation range, который описывает операционную область значений клапана, вводят 5e5 Па. Давление максимума предохранительного клапана является суммой давления набора и области значений регулирования.
В диалоговом окне блока 3-Way Directional Valve (IL), на вкладке P-A Orifice, устанавливает Spool position at maximum P-A orifice area на 0.01 m. Это - положение золотника клапана, когда путь к потоку P-A полностью открыт. На вкладке A-T Orifice, набор Spool position at maximum A-T orifice area к 0 m.
Параметр Spool travel between closed and open orifice на вкладке Model parameterization устанавливает расстояние, по которому оба отверстия открываются и близко. В этом значении закрываются оба отверстия.
В блоке Single-Acting Actuator (IL), набор Piston cross-sectional area к 0.001 m2.
От библиотеки Simscape> Foundation Library> Mechanical> Translational Elements добавьте блок Mechanical Translational Reference и соедините ее как показано на рисунке.

Это фиксирует механическое преобразование регистра Single-Acting Actuator (IL), который представлен портом C. Вал привода, представленный портом R, перемещается относительно этой ссылки.
От библиотеки Simscape> Foundation Library> Mechanical> Translational Elements перетащите эти блоки к холсту модели:
Соедините блоки как показано на рисунке.
Масса, элементы пружины и демпфера предоставляют базовой модели загрузки с принуждением, инерцией и затуханием.
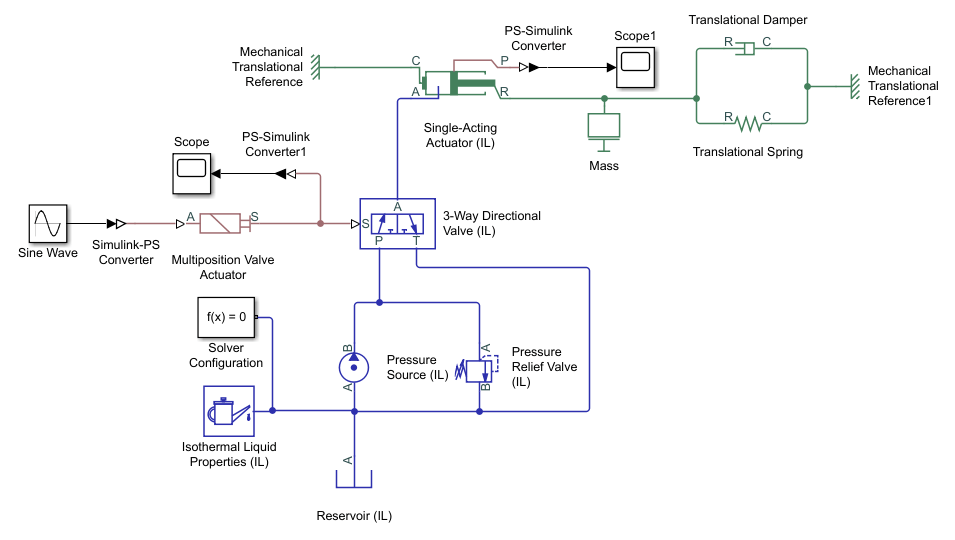
От библиотеки Simulink> Sources перетащите Sine Wave к холсту. Это представляет различный сигнал системе управления, которая в свою очередь регулирует поток, полученный приводом.
От библиотеки Simscape> Utilities перетащите один блок PS-Simulink Converter. Чтобы преобразовать между физическими сигналами Simscape, которые двунаправлены, и Сигналы Simulink, которые однонаправлены, необходимо будет использовать блок Simulink-PS Converter или PS-Simulink Converter.
Соедините блок Sine Wave, блок Simulink-PS Converter, который уже находится на холсте и блоке Multiposition Valve Actuator последовательно, как показано на рисунке.

В диалоговом окне блока Sine Wave, установленном параметр Amplitude на 24. Это значение соответствует номинальному значению сигналов по умолчанию блока Multiposition Valve Actuator.
Перетащите блок Scope из Simulink® Библиотека Sources. Блок Scope позволяет вам быстро смотреть результаты модели.
Соедините блок Single-Acting Actuator (IL), блок PS-Simulink Converter и блок Scope последовательно, как показано на рисунке.
Соедините выходную сторону блока Multiposition Valve Actuator, другого блока PS-Simulink Converter и блока Scope последовательно, как показано на рисунке.
Порт P блока Single-Acting Actuator (IL) выводит физический сигнал положения вала привода относительно Piston initial displacement.
Блок Multiposition Valve Actuator выводит физический сигнал расстояния открытия клапана относительно Initial position и Push-pin stroke.
Когда вы запускаете модель, программное обеспечение Simscape оценивает модель, определяет начальные условия симуляции и симулирует модель. Чтобы узнать больше об этом процессе, смотрите Как Моделирование Simscape.
Нажмите на любой блок в модели, например, блок Directional Valve (IL) С 3 путями. Во вкладке Simscape Block нажмите Log Data и выберите Log all Simscape data. Это позволяет вам исследовать значения переменных симуляции в Проводнике Результатов.
Нажмите Run.
Во вкладке Debug выберите Simscape> Variable Viewer. Переменное Средство просмотра показывает значения инициализации и приоритеты всех переменных модели. Можно поставить переменные цели и приоритеты во время инициализации для блоков с вкладкой Variables в диалоговом окне блока. Проверьте, что состояние всех переменных является зеленым.
Можно смотреть результаты симуляции несколькими способами. Для быстрой оценки модели используйте блоки Scope.
Дважды кликните на блоке Scope, соединенном с Multiposition Valve Actuator. Это показывает положение золотника клапана, которое установлено сигналом Multiposition Valve Actuator.

Увеличивание масштаб, существует маленький скачок в сигнале в начале второго пика.

Это может быть разрешено путем ограничения размера временного шага решателя:
Откройте диалоговое окно Configuration Parameter. На вкладке Modeling выберите Model Settings> Model Settings и нажмите Solver в левой панели.
Расширьтесь Решатель подробно излагает опцию.
Измените Max step size от auto к 0.01.
Нажмите OK.
Эта настройка будет использоваться в следующий раз, когда вы запускаете модель.
Дважды кликните на блоке Scope, соединенном с блоком Single-Acting Actuator (IL). График Scope показывает положение вала в зависимости от давления в полости привода.
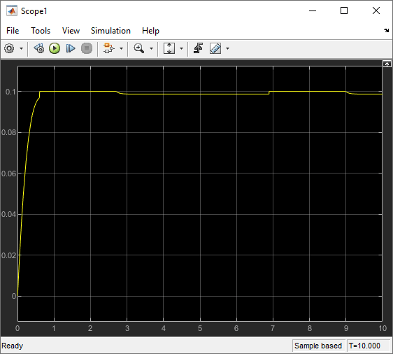
Кажется, что привод не полностью отвечает на сигнал, полученный от блока управления.
Экологическое давление задано в трех местах: в блоке Isothermal Liquid Properties (IL), в блоке Reservoir (IL), и в блоке Single-Acting Actuator (IL). В модели блок Reservoir (IL) установлен в 0,2 МПа, и другие два установлены в 0,101 МПа. В блоке Single-Acting Actuator (IL), набор Environment pressure specification к Specified pressure и набор Environment pressure к 0.2 MPa.
Запустите модель.
Проверяйте результаты с Проводником Результатов путем нажатия на любой блок, такие как блок Multiposition Valve Actuator, и выбора Results Explorer во вкладке Simscape Block.
Проводник Результатов показывает каждую переменную в модели, включая внутренние переменные, о которых не может сообщить блок Scope. Нажмите на опцию Single-Acting Actuator (IL) в левой панели. Это показывает график физического сигнала в порте P или положение вала привода. Щелкните плюс рядом с опцией, чтобы видеть переменные, регистрируемые для блока Single-Acting Actuator (IL).
График показывает положение вала в течение прошлых 3,5 секунд симуляции. Чтобы видеть положение вала по целой симуляции, выключите логарифмическое ограничение данных:
Откройте диалоговое окно Configuration Parameter. На вкладке Modeling в панели инструментов Simulink выберите Model Settings> Model Settings и нажмите Simscape в левой панели.
Очистите Limit data points.
Запустите модель.
Положение вала привода теперь следует за управляющим сигналом.

Существенные шаги для построения физической модели | Существенные физические техники моделирования
