Полная автомобильная симуляция ходовой части sdl_car пример охватывает все основные методы моделирования автомобильной трансмиссии и многих функций ключа Simscape™ Driveline™. Это включает механизм и модели передачи и модель дорожной колесом ходовой частью связи. Механизм и передача вместе с гидротрансформатором. Запрограммированное управление муфтой продвигается передача через четыре механизма во время симуляции. Сигналы давления муфты являются гладкими и более реалистичны, чем резкие сигналы давления муфты в более простых примерах ходовой части. В этом разделе описываются эти функции, подсистемы, и их отношение и цели, ведя вас к фактической симуляции.
Откройте пример. Модель содержит переменные рабочего пространства модели для параметризации некоторых блоков. Для получения информации о создании видят доступ и замена переменных рабочего пространства модели, Задают Источник для Данных в Данных о Рабочем пространстве модели Рабочего пространства модели и Изменения.
Транспортное средство с моделью передачи с четырьмя скоростями
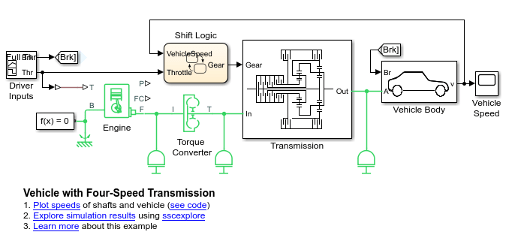
Основные подсистемы автомобильной трансмиссии и компоненты:
Входные параметры драйвера — профиль Дросселя/тормоза
Engine — Системная модель воспламенения искры и дизельного двигателя
Гидротрансформатор — Трехчастный гидротрансформатор, состоящий из рабочего колеса, турбины и статора.
Подсистема передачи — CR-CR передача с 4 скоростями
Логика сдвига — Stateflow® реализованный контроллер передачи
Кузов — Транспортное средство, шина и динамика тормоза
В то время как механизм бездействует первоначально на ненулевой скорости, передача, выход и транспортное средство в целом первоначально не перемещаются.
Блоком Driver Inputs является Simulink® Блок Signal Builder, который обеспечивает дроссель и сигналы тормоза к системе управления передачи и механизму. Откройте блок Driver Inputs, чтобы посмотреть профиль дросселя/тормоза для симуляции.
Сигнал дросселя запрограммирован, чтобы произвести реалистический ускоряющий профиль и согласовать с последовательностью сдвига механизма, описанной в Управлении Муфты. Сигнал дросселя питается к механизму и контроллеру передачи.
Сигнал тормоза предоставляет входную силу, которая приводит в движение торможение в Тормозной колодке Двойной Обуви в подсистеме Кузова.
В целях системного моделирования, механизма или двигателя задает выходной крутящий момент в зависимости от скорости автомобильной трансмиссии. Механизм имеет порт подключения, связывающий его вращательно с остальной частью системы.
Библиотека Engines содержит блоки, что вы управляете использованием входного физического сигнала для дросселя. Можно параметрировать блок Generic Engine с помощью векторов, чтобы задать скорость и крутящий момент. Блок вычисляет максимальный возможный крутящий момент в зависимости от скорости вращения двигателя в любой момент. Сигнал дросселя управляет, сколько из крутящего момента максимума может поставить механизм. Блок Piston Engine составляет мгновенный крутящий момент, переданный к карданному валу механизма. Мгновенный крутящий момент позволяет колебаниям модели в ходовой части из-за поршневого оборота. К модели только поршневой механизм двигателя внутреннего сгорания, используйте блок the Piston.
sdl_car пример использует блок Generic Engine, сконфигурированный как тип воспламенения искры. Свойства блока, заданные в диалоговом окне, включают максимальную мощность, скорость в максимальной мощности и максимальную возможную скорость механизма. Чтобы просмотреть настройки механизма, кликните по Блоку двигателя. Крутящий момент механизма и движение моделируются относительно вращательной земли, которая взята в качестве основной ссылки механизма и начальной точки автомобильной трансмиссии, или вращательного механического устройства, связей в этой модели.
Simscape Driveline позволяет вам создавать комплексные, пользовательские модели механизма. Несколько важных функций механизма, чтобы рассмотреть в сложной модели:
Различение установившегося поведения от запуска механизма, когда функция крутящего момента механизма скорости вращения двигателя еще не достигла своего максимального возможного конверта
Детали производства механической энергии, такие как сжатие воздушного топлива и сгорание
Дополнительные средства управления вне того, что может быть представлено одним сигналом дросселя
Подсистема передачи с 4 скоростями CR-CR в sdl_car модель похожа на другие примеры с той же передачей. Муфта и планетарные свойства механизма установлены в блоках с переменными рабочего пространства модели.
| Переменная рабочей области | Описание |
|---|---|
eff_tor_rad | Муфта: эффективный радиус крутящего момента (m) |
num_fric_surf | Муфта: количество трения появляется в контакте |
engagement_area | Муфта: площадь поверхности трения в контакте (m2) |
fric_coeff | Муфта: кинетический коэффициент трения поверхностей в контакте |
peak_normal | Муфта: статический (блокировка) коэффициент трения поверхностей в контакте |
velTol | Муфта: сожмите скоростной допуск блокировки (rad/s) |
pressThresh | Муфта: Нормированный порог давления |
p0 | Муфта: Физическая нормализация давления (Па) |
Для больше о механизмах, муфты и передачи, видят страницу с описанием блока Disk Friction Clutch.
sdl_car модель связывает механизм и передачу через блок гидротрансформатора.
Этап гидротрансформатора
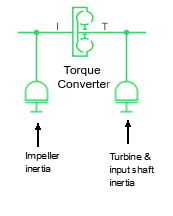
Как муфта, гидротрансформатор связывает две независимых оси автомобильной трансмиссии, чтобы передать угловое движение и крутящий момент с входа на выходной вал. Однако различающийся муфта, гидротрансформатор никогда не блокирует. Гидротрансформатор передает движение гидродинамической вязкостью, не поверхностным трением. Таким образом гидротрансформатор не продвигается через дискретные этапы и избегает разрывов движения, свойственных от муфт сцепления.
Чтобы подражать механизму, бездействующему в начале симуляции, начальным условием инерции рабочего колеса является ненулевая скорость вращения. Начальным условием турбины & входной инерции вала является нулевая скорость.
Для получения дополнительной информации об этих блоках, смотрите страницы с описанием блока Torque Converter и Inertia.
Передача кормит своим выходным крутящим моментом итоговую подсистему диска, Кузов. Эта подсистема представляет инерцию транспортного средства (нагрузка на передачу), колеса, тормоза, условия движения и контакт колеса с дорогой. Модели подсистемы только задние колеса, как управляется передачей.
Итоговая подсистема диска: кузов
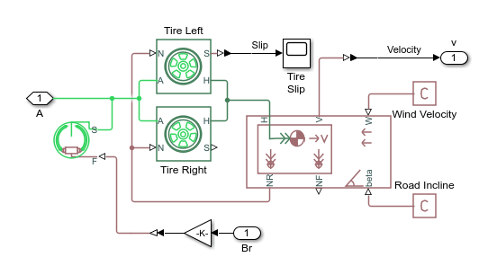
Подсистема имеет две главных области.
Правые и левые блоки шины принимают крутящий момент автомобильной трансмиссии и вращение от передачи в их оси колеса вращательные порты (A). Учитывая нормальную или вертикальную загрузку (N), этот крутящий момент и вращение преобразованы в силу тяги, и перевод в колесе концентрируют поступательные порты (H).
Шины вращаются неидеально, уменьшаясь, прежде чем они полностью будут генерировать тягу и будут реагировать против дорожного покрытия. О промахе шины левой шины сообщают как физический сигнал и преобразуют в Simulink для использования с осциллографом промаха Шины.
Блок Double-Shoe Brake представляет тормоз, расположенный, когда два вертелся твердая обувь, которая симметрично устанавливается внутри или снаружи барабана и управляется одним приводом. Тормозная колодка преобразует тормозящий сигнал от блока Driver Inputs до силы привода, которая проявляет момент трения на вале, который соединяет тормозной барабан с блоками шины.
Последовательность линии связи автомобильной трансмиссии модели заканчивается блоком Vehicle Body, который задает геометрию транспортного средства, массу, аэродинамическое перетаскивание и начальную скорость (нуль). Этот блок генерирует нормальные силы, которые блоки Шины принимают как вертикальные загрузки. Кузов принимает разработанную силу тяги и движение в его горизонтальном движении поступательный порт (H). Модель кузова также принимает скорость ветра (W) и дорожная наклонная поверхность (бета), оба предоставленные физическими константами.
Заднее колесо вертикальная сила загрузки (NR) сообщено с блоками Шины. Прямое колесо вертикальная загрузка (NF) не используется.
Прямую скорость (V) из транспортного средства преобразуют и сообщают, через выходной порт подсистемы, к скоростному осциллографу Транспортного средства.
sdl_car модели в качестве примера только задние колеса, задние шины и кузов, без более реалистических компонентов ходовой части дифференциалов и тормозов. sdl_vehicle_4wd пример иллюстрирует, как смоделировать транспортное средство, которое имеет четыре колеса и передние и задние дифференциалы.
Для получения информации о моделировании тормозных систем с помощью муфт смотрите Движение Тормоза Использовать Муфты и Смоделируйте Передачу 2D Скорости с Торможением.
Чтобы выбрать и затронуть соответствующий набор механизма, модель использует блок Stateflow и расписание муфты. Чтобы видеть, как эти компоненты работают, возвратитесь к основной модели sdl_car.
Блок Stateflow, который помечен Shift Logic, реализует выбор механизма для передачи. Блок определяет, переключить ли или вниз на основе входа от двух других компонентов в модели. Блок Driver Inputs предоставляет дроссель и тормозящую информацию. Подсистема Кузова предоставляет скорость кузова через обратную связь.
Чтобы открыть схему Stateflow, дважды кликните Логический блок Сдвига. Model Explorer используется, чтобы задать входные параметры как дроссель и скорость транспортного средства и выход как желаемый номер механизма. Два пунктирных состояния AND отслеживают состояние механизма и состояние процесса выбора механизма. Полный график выполняется как система дискретного времени. Показанная на рисунке схема Stateflow иллюстрирует функциональность блока.
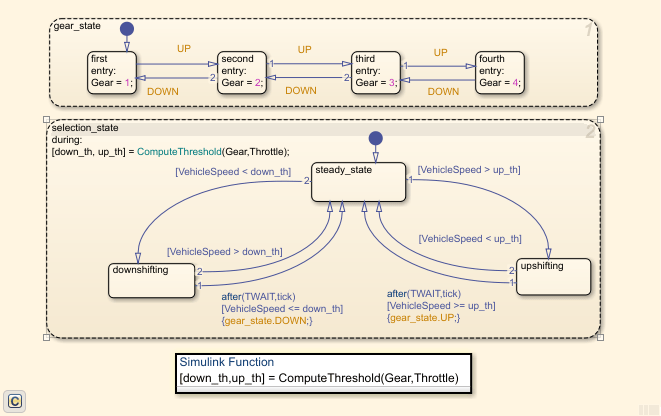
Модель вычисляет upshifting и включающие понижающую передачу пороги скорости в зависимости от мгновенных значений механизма и дросселя. В то время как в steady_state, модель сравнивает эти значения с существующей скоростью транспортного средства, чтобы определить, требуется ли сдвиг. Если так, это вводит одно из подтвердить состояний (upshifting или включающий понижающую передачу), который записывает время записи.
Если скорость транспортного средства больше не удовлетворяет условию сдвига, в то время как в подтвердить состоянии, модель игнорирует сдвиг, и это переходит назад к steady_state. Установившееся условие предотвращает посторонние сдвиги из-за шумовых условий. Если условие сдвига остается допустимым на срок TWAIT метки деления, переходы модели посредством более низкого соединения и, в зависимости от текущего механизма, это широковещательно передает одно из событий сдвига. Модель снова активирует steady_state после перехода посредством одного из центральных соединений. Событие сдвига, которое широковещательно передается к gear_selection утвердите, активирует переход к соответствующему новому механизму. Блок Stateflow выводит информацию о механизме к подсистеме расписания муфты, которая находится в подсистеме передачи.
Сигнал от блока Stateflow до расписания муфты управляет пятью муфтами передачи С 4 скоростями CR-CR. Чтобы видеть расписание муфты, откройте подсистему Передачи, и затем подсистему Расписания Муфты.
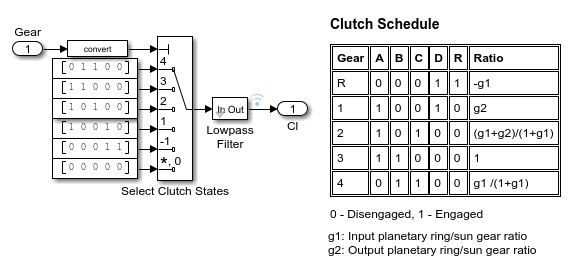
Модель сконфигурирована, чтобы симулировать в течение 50 секунд. Таблица показывает профиль механизма для симуляции.
| Области (области) значений времени | Настройки механизма CR-CR |
|---|---|
| 0–3.96 | 1 |
| 3.96–10.48 | 2 |
| 10.48–40.68 | 3 |
| 40.68–50 | 4 |
Симулируйте автомобиль.
Чтобы видеть результаты использовать Проводник Результатов Simscape, в описании в окне модели, нажимают Explore simulation results.
Построить вращательную скорость в RPMs и мощности в ваттах для механизма:
На левой панели окна Results Explorer расширьте узел для Engine
Кликните по узлу F, и затем узлу w.
Чтобы изменить модули для оси Y к оборотам в минуту, кликните по кнопке стрелки ниже метки оси Y (rad/s) и выберите rpm.
Добавить график степени, которую механизм поставляет гидротрансформатору, Ctrl+click узел P.
Добавьте график промаха шины.
Ctrl+click, чтобы расширить узел Vehicle_body.
Ctrl+click, чтобы расширить узел Tire_Left.
Ctrl+click узел S.
Добавьте график скорости транспортного средства.
Ctrl+click, чтобы расширить второй узел Vehicle_body.
Ctrl+click узел v.
Чтобы изменить модули в километры в час, кликните по кнопке стрелки ниже метки оси Y (m/s), выберите Specify, и для Specify your unit, введите km/hr.
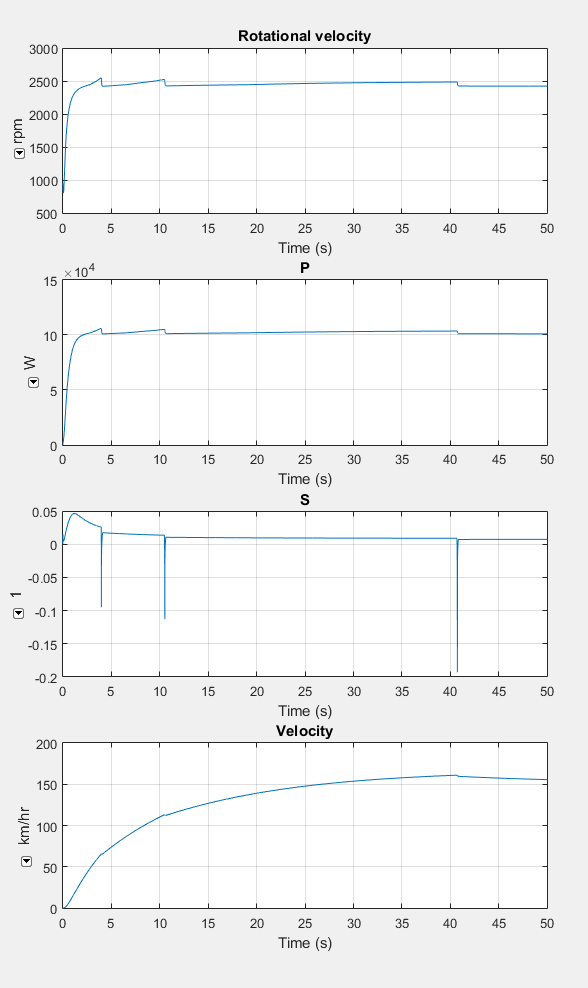
Графики показывают что для:
Скорость вращения двигателя и степень — Когда сдвиги передачи на второй механизм в 3,96 секунды, механизм достигает своей максимальной скорости и степени.
Утомите промах — Когда передача продвигается в более высокие механизмы, повышения отношения скорости. Падения отношения диска и шина подсовывают уменьшения. Движение шины более тесно приближается идеальный (нескольжение) движение на более высоких скоростях.
Скорость транспортного средства — скорость увеличивается меньше с каждым upshift для механизмов один, два, и три. Скорость уменьшается немного, прежде чем она начнет стабилизироваться, когда автомобиль на четвертой передаче.
