В этом примере вы исследуете различные силы и крутящие моменты, которые можно добавить в модель. Затем с помощью блоков с возможностью обнаружения движения вы анализируете получившийся динамический ответ модели. Конечный результат является набором временного интервала и графиков фазы, один для каждой комбинации сил и крутящих моментов. Вы создаете эти графики с помощью MATLAB® команды с движением Simscape™ Multibody™ выходные параметры в качестве аргументов.
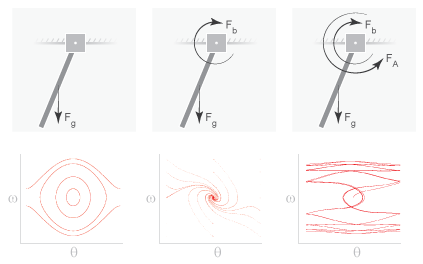
Ваша начальная точка является моделью математического маятника, что вы создали в Модели Математический маятник. Путем добавления сил и крутящих моментов к этой модели, вы инкрементно изменяете маятник от незатухающего и свободного к ослабленному и управляемому. Силы и крутящие моменты, которые вы применяете, включают:
Гравитационная сила (F g) — Глобальная сила, действующая на каждое тело в прямой пропорции к ее массе, которую вы задаете в терминах ускоряющего вектора g. Вы задаете этот вектор с помощью Блока Configuration Механизма.
Затухание соединения (F b) — Внутренний крутящий момент, между маятником и объединенным фиксатором, который вы параметрируете в терминах линейного коэффициента демпфирования. Вы задаете этот параметр с помощью блока Revolute Joint, который соединяет маятник с объединенным фиксатором.
Крутящий момент приведения в действие (F A) — Управляющий крутящим моментом, между маятником и объединенным фиксатором, который вы предписываете непосредственно как физический сигнал Simscape. Вы предписываете этот сигнал с помощью блока Revolute Joint, который соединяет маятник с объединенным фиксатором.
Откройте simple_pendulum модель, которую вы создали в примере, Моделируют Математический маятник.
В меню Sensing диалогового окна блока Revolute Joint выберите следующие переменные:
Position
Velocity
Блок осушает два дополнительных порта физического сигнала, пометил q и w, которые выводят угловое положение и скорость маятника относительно мировой системы координат.
Добавьте следующие блоки в модель. Вы используете их здесь, чтобы вывести объединенное положение и скорость к базовому рабочему пространству MATLAB.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape> Utilities | PS-Simulink Converter | 2 |
| Simulink> Sinks | To Workspace | 2 |
Измените параметры Variable name в К диалоговым окнам блока Рабочей области к q и w. Эти переменные дают возможность идентифицировать объединенные переменные, которые С блоками Рабочей области выводили в процессе моделирования — положение, через порт блока Revolute Joint q и скорость, через порт блока Revolute Joint w.
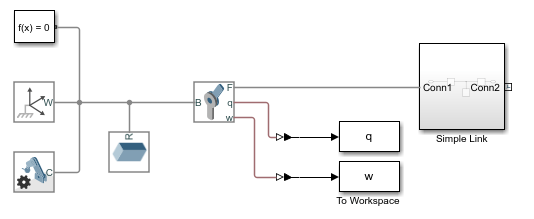
Соедините блоки как показано на рисунке. Убедитесь, что блок To Workspace с именем переменной q подключения, через блок PS-Simulink Converter, к порту блока Revolute Joint q, и что блок To Workspace с именем переменной w подключения к порту w блока Revolute Joint.
Сохраните модель под другим именем, например, simple_pendulum_analysis, в удобной папке.
Запустите симуляцию. Mechanics Explorer открывается 3-D анимацией модели математического маятника.
Постройте объединенное положение и скорость относительно времени, e.g., путем ввода следующего кода в командной строке MATLAB:
figure; % Open a new figure hold on; plot(q); % Plot the pendulum angle plot(w); % Plot the pendulum angular velocity

Постройте объединенную скорость вращения относительно углового положения, e.g., путем ввода следующего кода в командной строке MATLAB.
figure; plot(q.data, w.data);

Попытайтесь симулировать модель с помощью различных стартовых углов. Можно изменить стартовый угол в меню State Targets> Position диалогового окна блока Revolute Joint. Рисунок показывает составной график фазы для стартовых углов-80,-40, 0, 40, и 80 градусов.

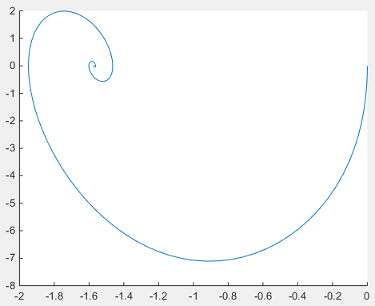
В диалоговом окне блока Revolute Joint, набор Internal Mechanics> Damping к 8e-5 (N*m) / (градус/с). Коэффициент демпфирования вызывает энергетическое рассеяние во время движения, приводящего к постепенному затуханию амплитуды колебания маятника.
Убедитесь, что State Targets> Position> Value установлен в 0 градус.
Запустите симуляцию.
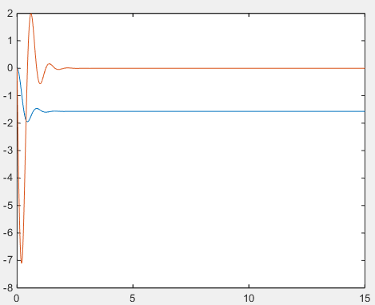
Постройте объединенное положение и скорость относительно времени. Для этого, в командной строке MATLAB, можно ввести этот код:
figure; hold on; plot(q); plot(w);
Постройте объединенный график фазы. Для этого, в командной строке MATLAB, можно ввести этот код:
figure; plot(q.data, w.data);
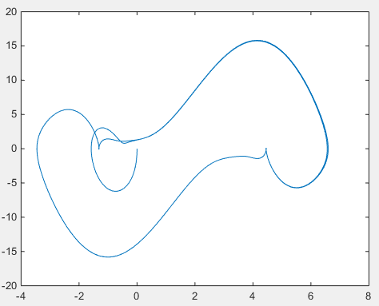
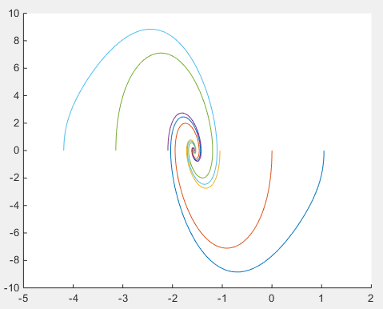
Попытайтесь симулировать модель с помощью различных стартовых углов. Можно изменить стартовый угол в меню State Targets> Position диалогового окна блока Revolute Joint. Рисунок показывает составной график фазы для стартовых углов-240,-180,-120,-60, 0, и 60 градусов.
В диалоговом окне блока Revolute Joint, набор Actuation> Torque к Provided by Input. Блок отсоединяет входной порт физического сигнала, который можно использовать, чтобы предписать объединенный крутящий момент приведения в действие.
Добавьте эти блоки в модель.
| Библиотека | Блок |
|---|---|
| Simscape> Utilities | Simulink-PS Converter |
| Simulink> Sources | Sine Wave |
Блок Sine Wave обеспечивает периодический вход крутящего момента как Simulink® сигнал. Блок Simulink-PS Converter преобразует Сигнал Simulink в физический сигнал Simscape, совместимый с блоками Simscape Multibody.
Соедините блоки как показано на рисунке.

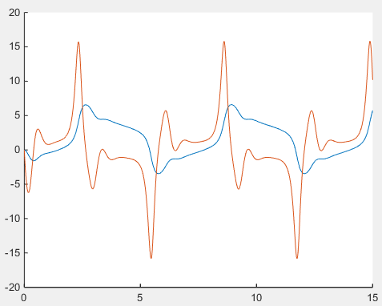
В диалоговом окне блока Sine wave, набор Amplitude к 0.06. Эта амплитуда соответствует крутящему моменту приведения в действие, колеблющемуся между-0.06 Н и 0,06 Н.
В диалоговом окне блока Revolute Joint гарантируйте, что State Targets> Position> Value установлен в 0 градус.
Запустите симуляцию.
Постройте объединенное положение и скорость относительно времени. Для этого, в командной строке MATLAB, можно ввести этот код:
figure; hold on; plot(q); plot(w);
Постройте объединенный график фазы. Для этого, в командной строке MATLAB, можно ввести этот код:
figure; plot(q.data, w.data);