Вы моделируете ясно сформулированную систему взаимосвязанными телами через соединения и иногда механизмы и другие ограничения. Тела вносят свою инерцию в модель, в то время как соединения, механизмы и ограничения определяют относительные степени свободы, которые существуют между телами. Вы соединяете два типа компонента путем соединения портов системы координат на Соединении, Механизме и Ограничительных блоках, чтобы структурировать порты на подсистемах тела.
Simscape™ Multibody™ автоматически собирает вашу модель, когда вы обновляете блок-схему. Во время обновления модели Simscape Multibody определяет начальные состояния соединений — их положений и скоростей — так, чтобы получившийся блок удовлетворил всем кинематическим ограничениям в модели. Этот процесс происходит в двух фазах с алгоритмом блока, сначала вычисляя объединенные положения и затем объединенные скорости. Полный процесс называется сборкой блока.
Соединения соединяются с телами через системы координат. Каждый Блок соединений содержит два порта системы координат, основа (B) и последователь (F), идентифицируя точки контакта в смежных телах и относительных направлениях, они могут приблизиться. Когда вы соединяете эти порты с системами координат в подсистемах тела, вы определяете, как сами тела соединяются на сборку блока.
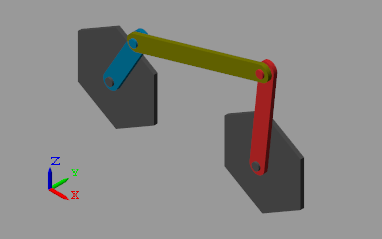
Объединенные системы координат, идентифицирующие точки контакта и ось вращения пропеллера самолета

Если соединение не имеет никакого приведения в действие и никакого обнаружения выходные параметры, его порты системы координат являются полностью взаимозаменяемыми. В этом случае можно переключить тела, с которыми соединяются порты, не влияя на динамику модели или обнаружение соединения выходные параметры. Если соединение действительно имеет входные параметры приведения в действие или распознающиеся выходные параметры, вы, возможно, должны инвертировать приведение в действие или распознающиеся сигналы получить то же динамическое поведение и результаты симуляции.
Чтобы изменить точки контакта соединения, необходимо изменить системы координат связи в смежных подсистемах тела. Вы делаете это путем указывания, что перевод преобразовывает использование блока Rigid Transform. Можно добавить новые блоки Твердого Преобразования в подсистемы тела или, при необходимости измениться, перевод преобразовывает в существующие Твердые подсистемы Преобразования.
Для получения дополнительной информации о том, как программное обеспечение Simscape Multibody интерпретирует порты системы координат, узлы и линии, видят Работу с Системами координат.
Получить движение ожидало в модели, необходимо выровнять ее различные оси совместного движения правильно. Это означает выравнивать сами соединения, как наблюдается или ожидается в действительной системе. Неправильное выравнивание объединенных осей может привести к неожиданному движению, но это часто приводит к чему-то более серьезному, такому как отказ собрать и симулировать.
Можно задать и измениться, объединенное выравнивание путем вращения связи структурирует локальный для смежных подсистем тела. С этой целью вы указываете, что вращение преобразовывает блоки Твердого Преобразования использования, или путем добавления, что новые блоки к подсистемам тела или, при необходимости путем изменения вращения преобразовывают в существующие блоки в подсистемах.
Почему изменение ориентация соединений через системы координат подсистемы тела? Примитивы в Блоке соединений у каждого есть предопределенная ось движения, такая как x или z. Определение оси фиксируется и не может быть изменено. Перестройка систем координат связи, локальных для смежных подсистем тела, обеспечивает естественный способ переориентировать соединения при предотвращении беспорядка, по которой оси конкретное соединение использует.
Соединения могут запустить симуляцию с различных состояний. Например, соединение заводной рукоятки рычажного устройства заводной рукоятки-рокера может запуститься под любым углом от 0 ° до 360 °. В результате во время сборки блока, Simscape Multibody должен выбрать из многих одинаково допустимых состояний. Можно вести состояния, выбранные путем определения целей состояния в диалоговых окнах Блока соединений.
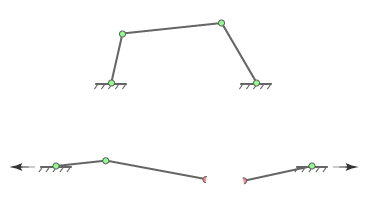
Механизм ползунка заводной рукоятки в полностью расширенных и начальных настройках в убранном положении

Цели состояния не должны быть точными значениями. Если Simscape Multibody не может достигнуть цели состояния точно, он ищет объединенное состояние, самое близкое к цели состояния. Например, если вы задаете цель состояния положения 60 °, но соединение может только достигнуть углов 0 ° к 45 °, Simscape Multibody пытается собрать соединение на уровне 45 °.
То, как близко фактическое объединенное состояние к цели состояния, зависит от кинематических ограничений в вашей модели, любых конфликтов с другими целями состояния и целевым приоритетным уровнем состояния — рейтинг, который определяет, какой из целей с двумя состояниями, чтобы удовлетворить, если они оказываются взаимно несовместимыми. Можно установить приоритетный уровень на Low или High.
Simscape Multibody сначала пытается удовлетворить всем целям состояния точно. Если целевой конфликт состояния возникает, Simscape Multibody игнорирует низкоприоритетные цели состояния и пытается удовлетворить только высокоприоритетным целям состояния. Если целевой конфликт состояния все еще существует, Simscape Multibody игнорирует также высокоприоритетные цели состояния и пытается собрать модель в самой близкой допустимой настройке.
Можно задать цели состояния для всех соединений в открытой кинематической цепи. Однако, чтобы избежать ошибок симуляции, каждая закрытая цепь должна содержать по крайней мере одно соединение без целей состояния.
Модель собирается успешно, только если связи между ее телами являются подходящими друг другом. Если в удовлетворении одному кинематическому ограничению, Simscape Multibody должен нарушить другое кинематическое ограничение, модель кинематическим образом недопустима и сбои блока. Это происходит, например, когда наземная ссылка блока четырёхзвенника превышает объединенную длину остающихся трех ссылок, препятствуя тому, чтобы по крайней мере одно соединение собралось.
Отказ общего собрания в четырёхзвеннике с чрезвычайно Длинной наземной ссылкой
Чтобы гарантировать, что ваша модель собралась правильно, используйте их утилиты Simscape и Simscape Multibody:
Mechanics Explorer — Утилита визуализации Simscape Multibody. Визуально исследуйте свою модель с различных точек зрения, чтобы гарантировать, что ее тела соединяются в ожидаемых местоположениях и с соответствующими ориентациями.
Переменное Средство просмотра — утилита создания отчетов состояния Simscape. Проверяйте состояние блока отдельных соединений и ограничений и сравните ваши цели состояния с фактическими объединенными состояниями, достигнутыми во время сборки.

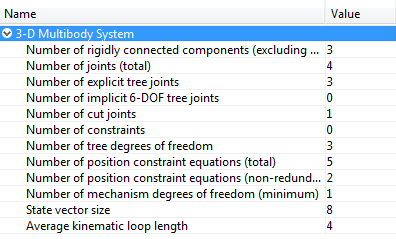
Statistics Viewer — Утилита создания отчетов метрик Simscape. Проверяйте, среди других метрик, степеней свободы, количества соединений и количества ограничений в вашей модели.