Пятифазовый постоянный магнит синхронный двигатель с синусоидальным распределением потока
Simscape / Электрический / Электромеханический / Постоянный магнит
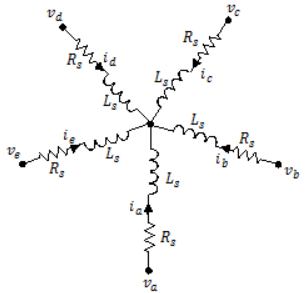
Блок PMSM (Five-Phase) моделирует постоянный магнит синхронный двигатель с пятифазовым статором звездообразной раны. Рисунок показывает эквивалентную электрическую схему для соединенных со звездой обмоток статора.
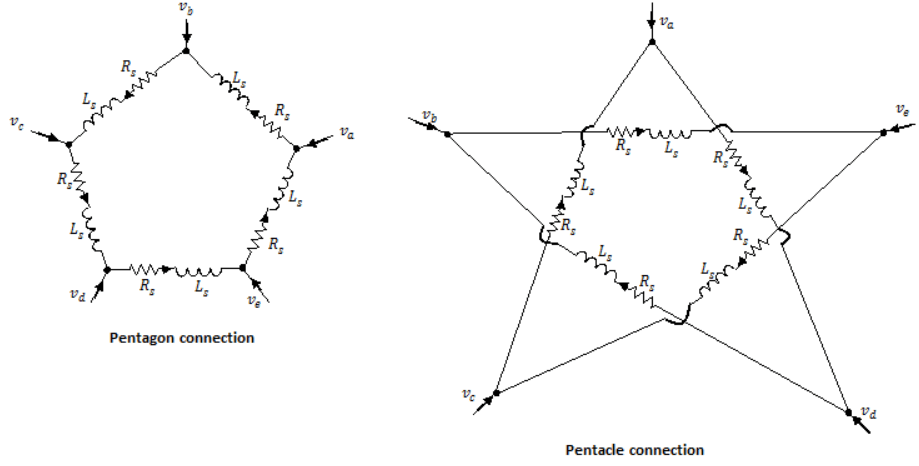
Можно также смоделировать постоянный магнит синхронный двигатель или в пятигранной ране или в настройке раны магической фигуры установкой Winding type к Pentagon-wound или Pentacle-wound.
Этот рисунок показывает моторную конструкцию с однополюсно-парным на роторе.
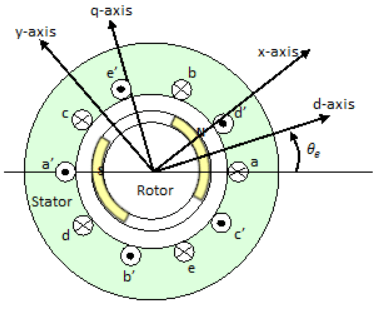
Постоянные магниты генерируют магнитное поле ротора, которое создает синусоидальную скорость изменения потока с углом ротора.
Для соглашения осей на предыдущем рисунке a - выравниваются фаза и потоки постоянного магнита, когда угол механического устройства ротора, θr, является нулем. Блок поддерживает второе определение оси ротора, в котором угол механического устройства ротора задан как угол между a - фазой магнитная ось и ротором q - ось.
Напряжения через обмотки статора заданы:
где:
va, vb, vc, vd и ve являются отдельными напряжениями фазы через обмотки статора.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib, ic, id и ie являются токами, текущими в обмотках статора.
и скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти пять обмоток способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан:
где:
ψa, ψb, ψc, ψd и ψe являются общими потоками, которые соединяют каждую обмотку статора.
Laa, Lbb, Lcc, Ldd и Lee являются самоиндукциями обмоток статора.
Lab, Lac, Lba, и так далее, является взаимной индуктивностью обмоток статора.
ψam, ψbm, ψcm, ψdm и ψem являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями ротора электрический угол, заданный:
и
где:
θr является углом механического устройства ротора.
θe является ротором электрический угол.
rotor offset является pi/2 если вы задаете ротор электрический угол относительно d-оси или 0 если вы задаете ротор электрический угол относительно q-оси.
Ls является статором самоиндукция на фазу. Это значение является средней самоиндукцией каждой из обмоток статора.
Lm является колебанием индуктивности статора. Это значение является колебанием самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность. Это значение является средней взаимной индуктивностью между обмотками статора.
Поток постоянного магнита, соединяющий извилистый a-a', в максимуме когда θe = 0 ° и нуль когда θe = 90 °. Поэтому соединенный моторный поток задан:
где ψm является потокосцеплением постоянного магнита.
Чтобы удалить угловую зависимость ротора для индуктивных терминов, вы выполняете преобразование, T, на уравнениях двигателя.
Преобразование T задано:
где θe является электрическим углом, заданным как Nθr. N является количеством пар полюса.
Матрица преобразования имеет следующее псевдоортогональное свойство:
Используя преобразование T на статоре извилистые напряжения и токи преобразовывают их к dq0 и системам координат xy, которые независимы от угла ротора:
и
Применение этого преобразования к первым двум электрическим уравнениям производит следующие уравнения, которые задают поведение блока:
и
где:
Ld = Ls + Ms + 5/2 Lm. Ld является статором d - составляющая индукции.
Lq = Ls + Ms − 5/2 Lm. Lq является статором q - составляющая индукции.
L0 = Ls – 4Ms. L0 является индуктивностью нулевой последовательности статора.
ω является скоростью вращательного механического устройства ротора.
N является количеством пар полюса постоянного магнита ротора.
Можно параметрировать двигатель при помощи коэффициента противо-ЭДС или закрутить константы, которые чаще всего даются в моторных таблицах данных, при помощи опции Permanent magnet flux linkage.
Коэффициент противо-ЭДС, постоянная задан как пиковое напряжение, вызванное постоянным магнитом в каждой скорости вращения фаз на модуль. Это связано с пиковым потокосцеплением постоянного магнита:
Из этого определения, из этого следует, что коэффициентом противо-ЭДС, eph, для одной фазы дают:
Постоянный крутящий момент задан как пиковый крутящий момент, вызванный каждым током фаз на модуль. Это численно идентично в значении коэффициенту противо-ЭДС, постоянной, когда оба описываются в единицах СИ:
Когда Ld = Lq, и когда токи во всех пяти фазах сбалансированы, из этого следует, что объединенным крутящим моментом T дают:
где Ipk является максимальным током в любой из этих трех обмоток.
Фактор 5/2 вычисляется от установившейся суммы крутящих моментов от всех фаз. Поэтому крутящий момент постоянный kt мог также быть задан как:
где T является измеренным общим крутящим моментом при тестировании со сбалансированным трехфазным током с пиковым линейным напряжением Ipk. Линейное напряжение RMS измеряется как:
Блок обеспечивает два варианта моделирования. Чтобы выбрать желаемый вариант, щелкните правой кнопкой по блоку по своей модели. Из контекстного меню выберите Simscape> Block choices, и затем один из этих вариантов:
No thermal port — Блок содержит расширенные электрические порты сохранения, сопоставленные с обмотками статора, но не содержит тепловые порты.
Show thermal port — Блок содержит расширенные электрические порты сохранения, сопоставленные с обмотками статора и шестью тепловыми портами сохранения, один для каждой из этих пяти обмоток и один для ротора.
Используйте тепловые порты, чтобы симулировать эффекты медного сопротивления, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Выбор теплового варианта блока отсоединяет тепловые параметры.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
[1] Л. Парса и Х. А. Толиьят. Sensorless Прямое Управление Крутящим моментом Пятифазовых Внутренних Дисков Электродвигателя с постоянным магнитом. Транзакции IEEE на Промышленных Приложениях, издании 43, № 4, pp.952-959, июль-август 2007.
[2] Андерсон, пополудни анализ неработающих энергосистем. IEEE нажимает Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
PMSM | Гибридное возбуждение PMSM | (Однофазный) PMSM | Пятифазовое управление крутящим моментом PMSM | Пятифазовое скоростное управление PMSM
