Симулируйте и подтвердите свои лестничные схемы путем моделирования их в Simulink® PLC Coder™.
Можно затем симулировать и сгенерировать код для лестничных моделей схемы из окружения Simulink.
Чтобы создать лестничную схему, откройте лестничную библиотеку схемы Simulink PLC Coder. Чтобы открыть лестничную структуру схематически изображают библиотеку, в MATLAB® командная строка, введите:
plcladderlib
Лестничная библиотека открывается содержащий все блоки, требуемые для создания лестничной схемы в Simulink.
Создайте пустую модель Simulink. Можно перетащить соответствующие блоки из библиотеки, чтобы создать лестничную модель логики в Simulink. Для каждого блока дважды кликните блок, чтобы видеть параметры блоков. Используйте help меню, чтобы просмотреть описание параметров блоков. Для получения дополнительной информации о лестничных инструкциях по схеме и этих блоках, отошлите к LOGIX 5 000 Контроллеров Общий Справочник Инструкций. Перейдите к https://literature.rockwellautomation.com/idc/groups/literature/documents/rm/1756-rm003_-en-p.pdf
Лестничная библиотека схемы Simulink PLC Coder содержит лестничные логические блоки верхнего уровня, такие как PLCControllerSuite, PLC Controller, Task, Ladder Diagram Program, Ladder Diagram Subroutine, Ladder Diagram Function Block (AOI) и AOI Runner. Все эти блоки являются организационными блоками (лестничные контейнеры схемы), что вы не можете поставить лестничные ступеньки схемы. Другие блоки из библиотеки не могут быть лестничными логическими блоками верхнего уровня для симуляции.
Блок PLCControllerSuite может содержать теги контроллера, которые отображаются для всех лестничных логических блоков в этом контроллере и содержат блок Task.
Блок PLCController позволяет вам создать лестничную логику непосредственно. Все теги в лестничной схеме уровня контроллера являются тегами контроллера (глобальные переменные или символы ввода-вывода)
Блок Task содержит лестничные программы схемы, которые используют тот же шаг расчета и приоритет.
Генерация кода для пустых блоков Task не поддерживается. Если блок Task пуст, программное обеспечение не делает предупреждений о проблемах или ошибок во время генерации кода, но сгенерированный код производит ошибки в Rockwell Automation® ИДЫ.
Блок Ladder Diagram Program позволяет вам создать лестничную логику непосредственно. Лестничные схемы уровня программы могут иметь переменные осциллографа программы, и могут теги контроллера доступа, если задано.
Блок Ladder Diagram Subroutine позволяет вам создать и задать именованную лестничную стандартную программу. Можно отредактировать логику, реализованную стандартной подпрограммой путем нажатия на Routine Logic кнопка в соответствии с меню параметров блоков этого блока.
Блок Ladder Diagram Function Block (AOI) включает, вы, чтобы создать лестничную структуру схематически изображаете функциональный блок. Можно отредактировать параметры и технические требования этого блока при помощи различных вариантов, доступных в меню параметров блоков этого блока.
Блок AOI Runner является специальным блоком программы, который может содержать только один Лестничный Функциональный блок Схемы, спроектированный для тестирования инструкции по дополнению (AOI) (генерация испытательного стенда и верификация).
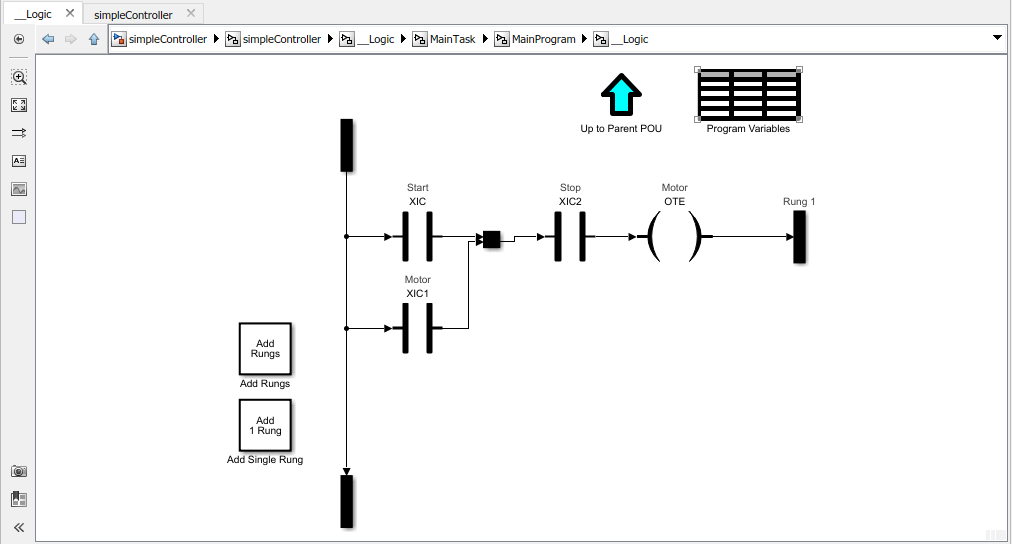
Перетащите блок PLCControllerSuite в пустую модель, которую вы создали. Можно дважды кликнуть каждый организационный модуль, чтобы пересечь к лестничной семантике логики низшего уровня и создать лестничную схему. Это изображение показывает пустую лестничную логическую схему.
![]()
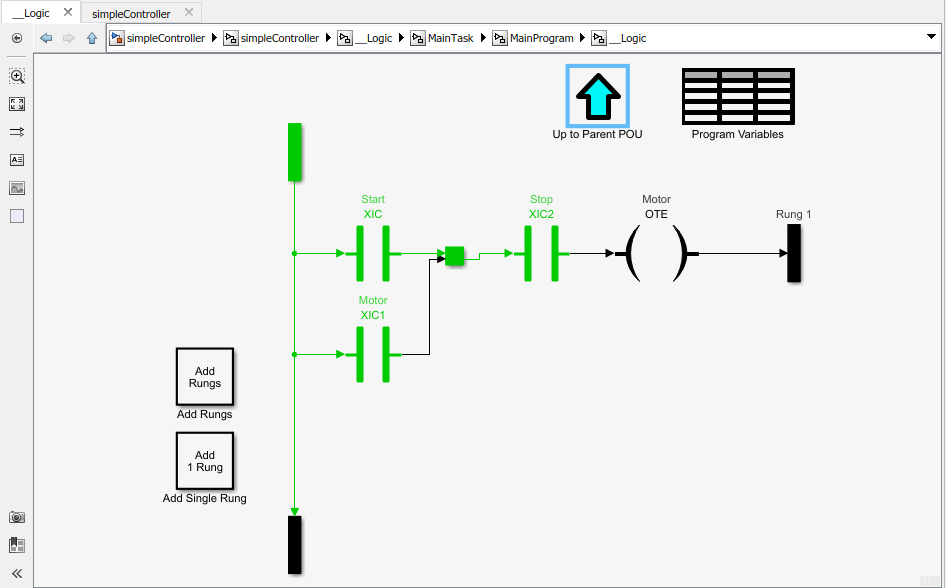
Используйте XIC и блоки OTE из библиотеки, чтобы создать простую лестничную схему. Используйте кнопки Add Rungs или Add 1 Rung в лестничной логике, семантической, чтобы добавить новое, которому звонят. Все добавленные блоки должны быть на звонившем. Используйте блок Junction, чтобы объединить ветви, которым звонят.
Дважды кликните каждый новый блок, добавленный к звонившему, и задайте теги. В лестничных схемах теги (переменные) представляют все входные параметры, выходные параметры и внутреннюю память. Тег может быть именем переменной или выражением, таким как:
Имя переменной: запустите, остановитесь, переключатель
Битный доступ: MyInt.0, MyInt.31
Элемент массива: [1], B[2,3], C [idx], D [i, j]. Использование фигурных скобок для индексации не позволено в выражении тега. Например, (2) недопустимо.
Структура: A.B, C.D, E.F.G
Смесь: [1].B [i, j].C[3].D
Выражения: [3].B> C.D; [3] +B[4].C
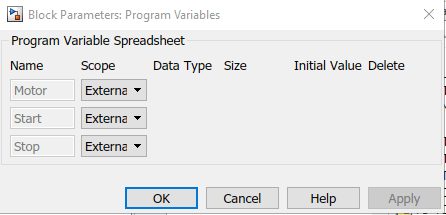
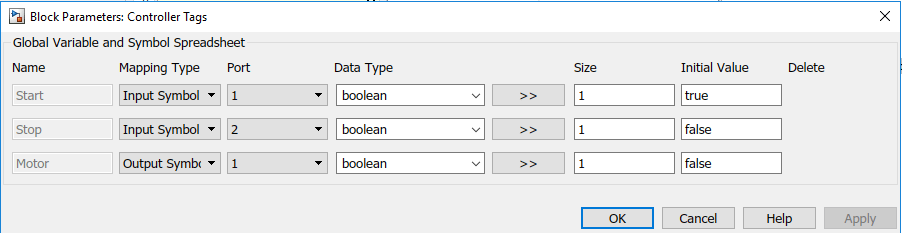
Чтобы изменить атрибуты тега, откройте таблицу Program Variables в блоке Ladder Diagram Program. Теги могут иметь атрибуты, такие как Тип данных, Начальное значение и Размер. Можно удалить неиспользуемые переменные в таблице переменных путем выбирания опции Delete. Выберите Apply для изменений, чтобы вступить в силу. Перейдите к блоку Controller Level и дважды кликните таблицу Controller Tags, чтобы задать глобальную переменную и атрибуты символа ввода-вывода.
Чтобы добавить комментарии, которым звонят, в вашу модель в Simulink, создайте связанную аннотацию (см. Motor Control Logic в изображении) к клеммной колодке, которой звонят. См. Объединенные Аннотации с Блоками и областями.
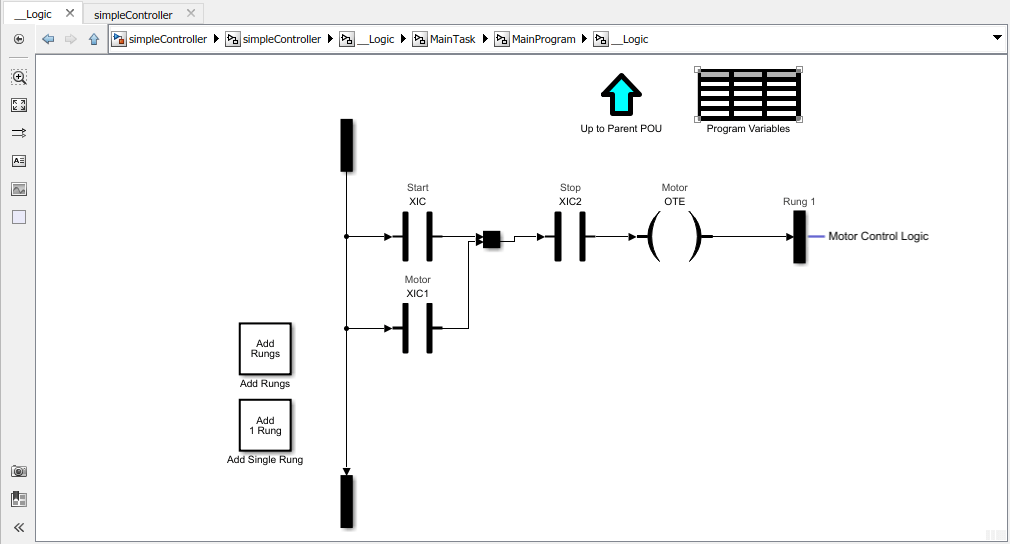
Используйте Ctrl+D обновить лестничную модель логики, чтобы отразить изменения. Вы теперь создали простую лестничную модель в Simulink.
Чтобы выполнить лестничную структуру схематически изображают симуляцию в Simulink, необходимо соединить блоки ввода и вывода с лестничной моделью, которые соответствуют, действия, которые будут выполняться лестничной структурой, схематически изображают вводы и выводы.
Для симуляции, чтобы включить Анимацию, использование plcladderoption функция. В командной строке MATLAB, введите:
plcladderoption('simpleController','Animation','on')Соедините порты ввода и вывода с блоком PLCControllerSuite, чтобы обеспечить входные параметры для симуляции и считать выходные параметры. Необходимо изменить атрибуты переключателя и моторных тегов. Чтобы изменить атрибуты тега, откройте таблицу Program Variables в блоке Ladder Diagram Program и установите их на показанные значения.
Перейдите к блоку Controller Level и дважды кликните таблицу Controller Tags, чтобы задать глобальную переменную и атрибуты символа ввода-вывода.
Программное обеспечение добавляет порты ввода и вывода в блок PLCControllerSuite. Можно использовать блоки Simulink, чтобы добавить входные параметры в лестничную модель. Например, можно использовать блок Constant, чтобы добавить булевы входные параметры, чтобы подражать поведению переключателя.
Перейдите с блоком Ladder Diagram Program лестничной модели и нажмите Step Forward, чтобы продвинуться посредством симуляции. Программное обеспечение использует входные параметры, если, запускает моделирование на поведенческом уровне и анимирует лестничные ступеньки и блоки на основе режима выполнения.
Можно продолжить выходить вперед или запустить непрерывную симуляцию до времени остановки симуляции.
plcimportladder | plcgeneraterunnertb | plcgeneratecode | plcladderlib | plcladderoption | plcloadtypes | plccleartypes
