Возмущение задано на объекте
perturbs = perturbations(obj)perturbs, заданный на объекте, obj. Возвращенный perturbs списки все perturbable свойства. Если какое-либо свойство не встревожено, то его соответствующий Type возвращен как "Null" и его соответствующий Value возвращен как {Null,Null}.
perturbs = perturbations(obj,property,'Selection',values,probabilities)property возмущение возместило чертивший от набора values это имеет соответствующий probabilities.
perturbs = perturbations(obj,property,'TruncatedNormal',mean,deviation,lowerLimit,upperLimit)property возмущение возместило чертивший от нормального распределения с заданным meanСтандартное отклонение, нижний предел и верхний предел.
perturbs = perturbations(obj,property,'Custom',perturbFcn)perturbFcn, это чертит значение смещения возмущения.
Можно указать, что распределение для возмущения применилось к определенному свойству.
Распределение выбора — функция задает смещение возмущения как одно из заданных значений со связанной вероятностью. Например, если вы задаете значения как [1 2] и задайте вероятности как [0.7 0.3], затем perturb функция добавляет значение смещения 1 к свойству с вероятностью 0.7 и добавьте значение смещения 2 к свойству с вероятностью 0.3. Используйте распределение выбора, когда вы только захотите встревожить свойство со многими дискретными значениями.
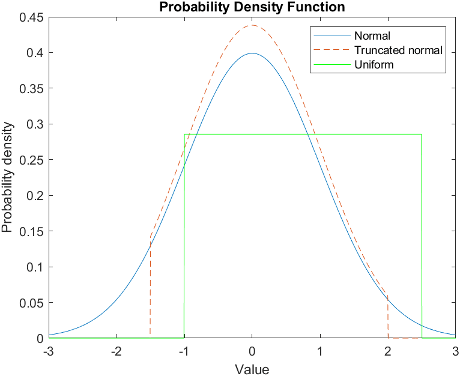
Нормальное распределение — функция задает смещение возмущения как значение, чертившее от нормального распределения с заданным средним и стандартным отклонением (или ковариация). Нормальное распределение является обычно используемым распределением, поскольку это подражает естественному возмущению параметров в большинстве случаев.
Усеченное нормальное распределение — функция задает смещение возмущения как значение, чертившее от усеченного нормального распределения с заданным средним значением, стандартное отклонение (или ковариация), нижний предел и верхний предел. Отличающийся от нормального распределения, значения, чертившие от усеченного нормального распределения, являются усеченными нижним и верхним пределом. Используйте усеченное нормальное распределение, когда это необходимо, чтобы применить нормальное распределение, но допустимые значения свойства ограничиваются в интервале.
Равномерное распределение — функция задает смещение возмущения как значение, полученное из равномерного распределения с заданными минимальными и максимальными значениями. Все значения в интервале (заданный минимальными и максимальными значениями) имеют ту же вероятность реализации.
Пользовательский дистрибутив — Настраивает вашу собственную функцию возмущения. Функция должна иметь этот синтаксис:
offset = myfun(propVal)
propVal значение property и offset смещение возмущения для свойства.Этот рисунок показывает функции плотности вероятности для нормального распределения, усеченного нормального распределения и равномерного распределения, соответственно.