Радарные прибыли и убытки модели и оценивают эффективность в различных средах
Приложение Radar Designer является интерактивным инструментом, который помогает инженерам и системным аналитикам из высокоуровневого проекта и оценки радиолокационных систем на ранней стадии радарной разработки. Используя приложение, вы можете:
Оцените и сравните несколько радарных проектов на одном сеансе
Добавьте умный радар, среду, и предназначайтесь для Настроек Radar Designer, чтобы начать ваш анализ
Включите воздействие на окружающую среду из-за искривления Земли, атмосферы, ландшафта и осадков
Добавьте пользовательские эффективные площади рассеивания цели, антенну/модели массивов, и и независимые от области значений и зависимые областью значений потери
Экспортируйте и сохраните результаты, сеансы, модели и графики продолжить ваш анализ
MATLAB® Панель инструментов: На вкладке Apps, под Signal Processing and Communications, кликают по значку приложения.
Командная строка MATLAB: Войти radarDesigner.
Спроектируйте радар, чтобы установить сверху грузовика. Настройте расчетные параметры, таким образом, радар может работать в туманных условиях и все еще сделать объективную область значений. Экспортируйте сеанс проекта в рабочее пространство MATLAB.
Открытый Radar Designer. В командной строке ввести
radarDesigner
Automotive Radar опция. Приложение задает типичный радарный проект, цель и параметры среды.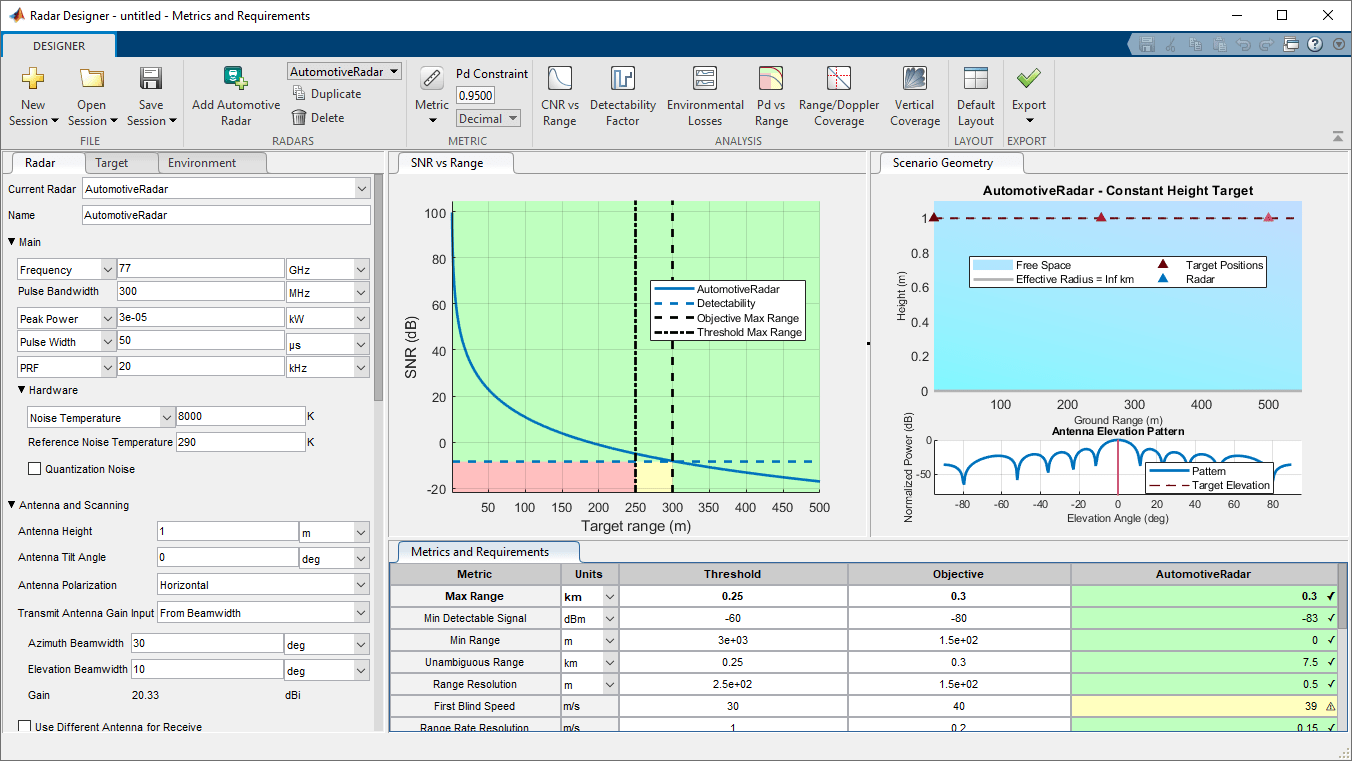
Радар, который вы проектируете, должен быть установлен 3 метра над землей. На Radar перейдите в Antenna and Scanning разделите, измените Antenna Height с 1 метра до 3 метров.
На Environment перейдите в Precipitation разделите, задайте Precipitation Type как Fog и набор Fog Density к Heavy.
Как SNR vs Range график и Metrics and Requirements таблица show, радар удовлетворяет, пороговый максимум располагаются, но далек от желаемой максимальной области значений 300 метров.
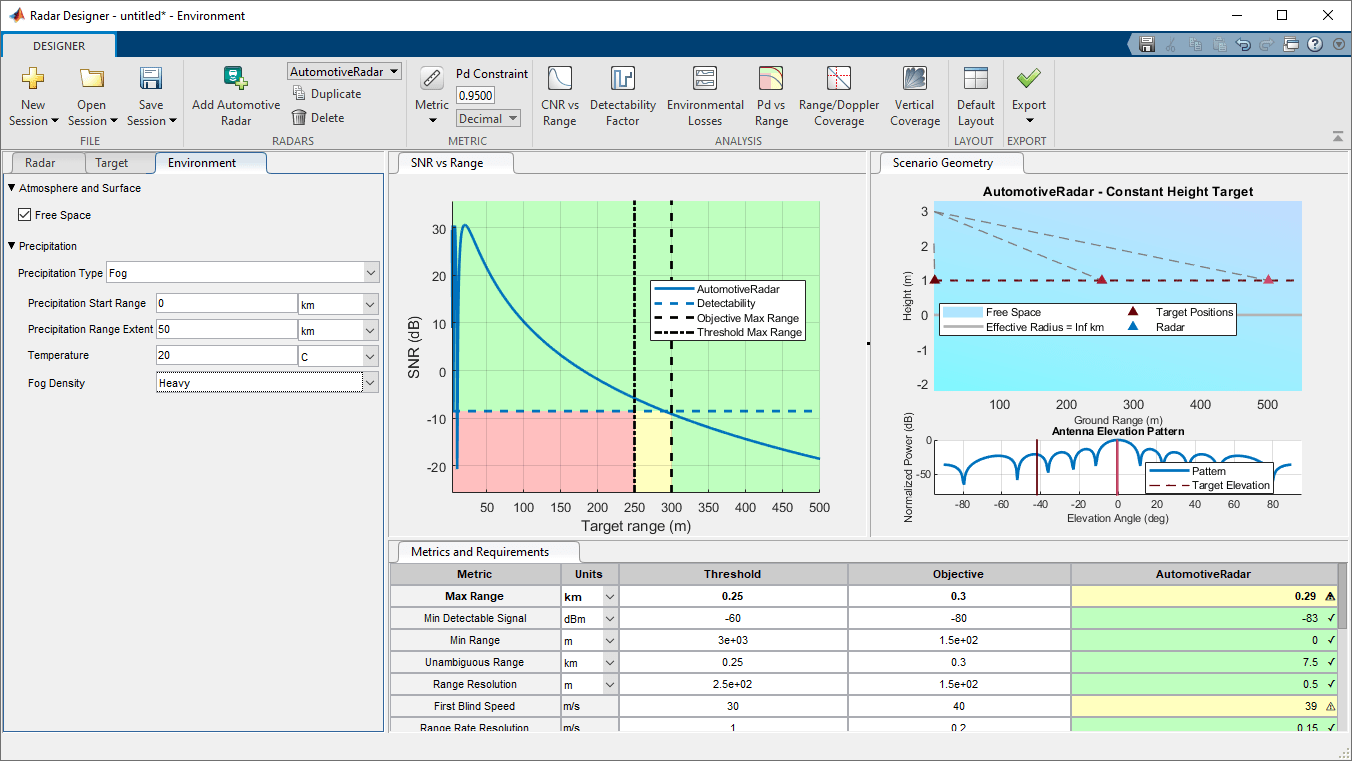
Увеличьте переданную степень достигнуть более высокой максимальной области значений. На Radar перейдите в Main разделите, увеличьте Peak Power к 4e-05
kW. График и таблица show, что радар удовлетворяет требованию новым значением степени.
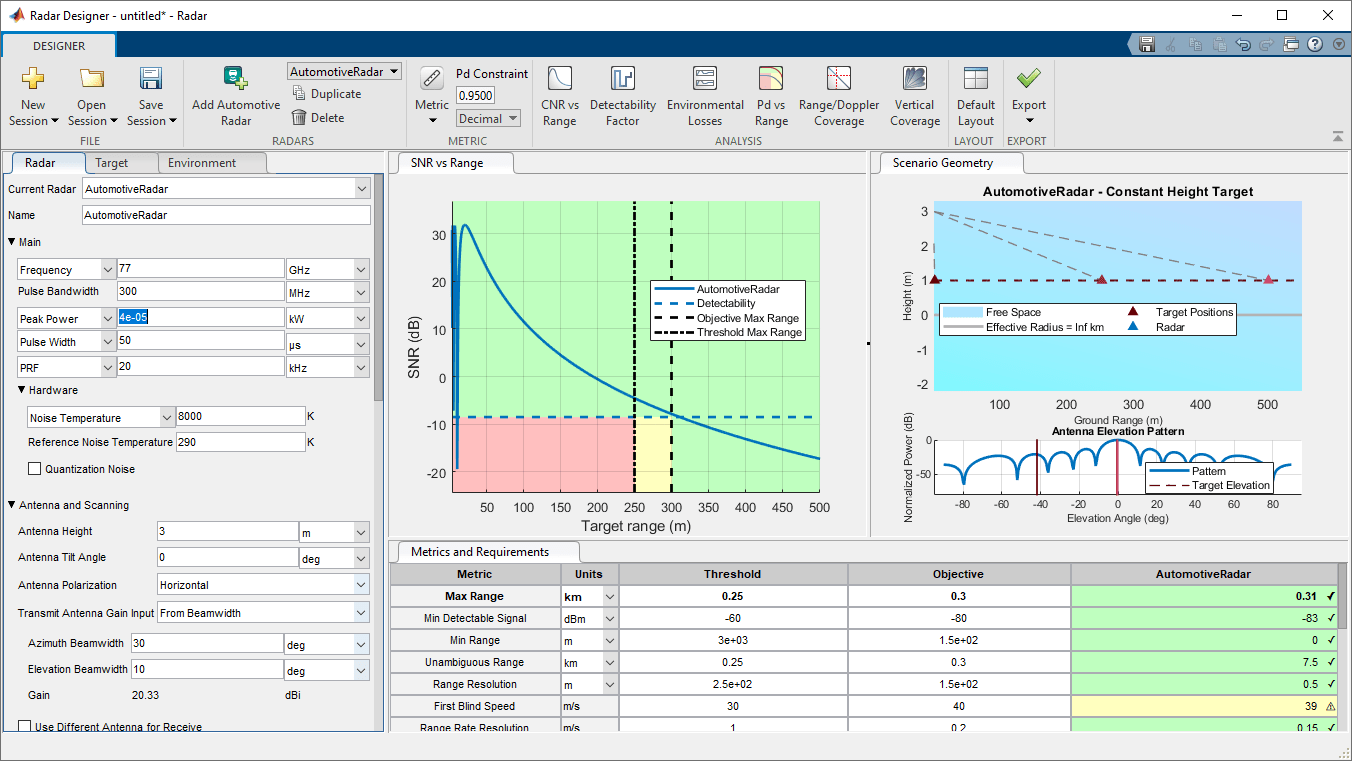
Экспортируйте радарный проект в рабочее пространство MATLAB. На панели инструментов нажмите Export и выберите Generate Metrics Report сгенерировать отформатированный отчет числовых метрик.
Radar — Расчетные параметрыЧтобы включить параметры Radar, нажмите New Session на панели инструментов приложения, чтобы загрузить одну из встроенных Настроек Radar Designer. Используйте раздел Radars панели инструментов приложения, чтобы добавить, скопировать, или удалить радарные проекты во время сеанса.
Используйте список Current Radar, чтобы переключиться между различными радарными проектами в одном сеансе.
Используйте поле Name, чтобы изменить название в настоящее время выбранного радара.
Main — Импульс и настройки несущейИспользуйте эти параметры, чтобы задать импульс и настройки несущей, такие как несущая частота и переданная степень.
| Параметр | Описание |
|---|---|
Несущая Frequency (значение по умолчанию) или Wavelength | Несущая частота или длина волны несущей в виде скаляра.
|
| Pulse Bandwidth | Полоса пропускания переданного импульса в виде скаляра в Hz, kHz, MHz, или GHz. |
Average Power (значение по умолчанию) или Peak Power | Средняя переданная степень или пик передали степень в виде скаляра.
|
Pulse Width (значение по умолчанию) или Duty Cycle | Радарная ширина импульса или радарный рабочий цикл в виде скаляра.
|
PRF (значение по умолчанию) или PRI | Импульсная частота повторения (PRF) или импульсный интервал повторения (PRI) в виде скаляра.
|
Hardware — Шумовые настройкиИспользуйте эти параметры, чтобы задать шумовые настройки, такие как шумовой диапазон температур или динамический диапазон.
| Параметр | Описание |
|---|---|
Noise Temperature или Noise Figure | Шумовая температура или шумовая фигура в виде скаляра.
|
| Reference Noise Temperature | Ссылочная шумовая температура в виде скаляра в K. |
| Quantization Noise | Выберите Quantization Noise, чтобы включать шум квантования. |
| Number of Bits | Количество битов в аналого-цифровом конвертере (A/D) в виде безразмерного скаляра. Этот параметр применяется, только если Quantization Noise выбран. |
| Dynamic Range | Динамический диапазон конвертера A/D в виде скаляра в Этот параметр применяется, только если Quantization Noise выбран. |
Antenna and Scanning — Положение, ширина луча и настройки усиленияИспользуйте эти параметры, чтобы задать положение, ширину луча и настройки усиления, такие как высота антенны, поляризация антенны или ширина луча азимута.
| Параметр | Описание |
|---|---|
| Antenna Height | Высота антенны выше поверхности в виде скаляра в Этот параметр применяется и к передающей антенне и к получить антенне. |
| Antenna Tilt Angle | Угол между электрической осью антенны и наземной плоскостью в виде скаляра в Этот параметр применяется и к передающей антенне и к получить антенне. |
| Antenna Polarization | Задайте поляризацию антенны как Этот параметр применяется и к передающей антенне и к получить антенне. |
Transmit Antenna Gain Input — Коэффициент усиления передающей антенныЗадайте Transmit Antenna Gain Input как один из них:
Manual — Используйте поле Gain, чтобы ввести пользовательское значение для передающей антенны в dBi.
From Beamwidth — Вычислите коэффициент усиления передающей антенны из ширины луча, принимающей идеальную Гауссову диаграмму направленности без боковых лепестков. Можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Azimuth Beamwidth | Ширина луча азимута передающей антенны в виде скаляра в deg, rad, или mrad. |
| Elevation Beamwidth | Ширина луча вертикального изменения передающей антенны в виде скаляра в deg, rad, или mrad. |
Radar Designer вычисляет и отображает коэффициент передачи приёмной антенны в dBi.
Receive Antenna Gain Input — Коэффициент передачи приёмной антенны, если отличающийся от передающей антенныВыберите Use Different Antenna for Receive, чтобы указать, что получение и передающие антенны имеют различные усиления. Если вы используете различную антенну для, получают, можно задать Receive Antenna Gain Input как один из них:
Manual — Используйте поле Gain, чтобы ввести пользовательское значение для получить антенны в dBi.
From Beamwidth — Вычислите коэффициент передачи приёмной антенны из ширины луча, принимающей идеальную Гауссову диаграмму направленности без боковых лепестков. Можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Azimuth Beamwidth | Ширина луча азимута получить антенны в виде скаляра в deg, rad, или mrad. |
| Elevation Beamwidth | Ширина луча вертикального изменения получить антенны в виде скаляра в deg, rad, или mrad. |
Radar Designer вычисляет и отображает коэффициент передачи приёмной антенны в dBi.
Scan Mode — Настройки режима сканированияЗадайте режим сканирования для своего проекта как один из них:
None — Радар не выполняет сканирования. Radar Designer не включает связанные со сканированием потери в анализ.
Mechanical — Радар выполняет механическое сканирование. Radar Designer включает потерю формы луча, и луч - живут фактор (зависимая областью значений потеря для того, чтобы быстро отсканировать луч) в анализ.
Electronic — Радар использует фазированную решетку, чтобы выполнить электронное сканирование. Radar Designer включает потерю формы луча и потерю сектора скана в анализ.
Если вы задаете Scan Mode как Mechanical или Electronic, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Azimuth Scan Sector Size | Промежуток азимута поискового объема в виде скаляра в deg, rad, или mrad. |
| Elevation Scan Limits | Начальные и итоговые вертикальные изменения объема скана в виде двух скаляров в deg, rad, или mrad. |
На основе выбранных параметров Radar Designer вычисляет и отображает эти настройки:
Max Scan Rate, максимальная частота развертки в градусах в секунду, учитывая выбранный PRF, количество переданных импульсов и ширину луча антенны. Эта установка отображена, если Scan Mode задан как Mechanical.
Search Volume Size, размер сплошного углового объёма поиска в стерадианах.
Search Time, время в секундах это берет, чтобы отсканировать поисковый объем, учитывая выбранный PRF, количество переданных импульсов и ширину луча антенны.
Detection and Tracking — P fa, CPI и M-of-N настройкиИспользуйте эти параметры, чтобы задать P fa, CPI и M-of-N настройки, такие как вероятность ложного предупреждения или порога логики подтверждения дорожки.
| Параметр | Описание |
|---|---|
| Probability of False Alarm | Желаемая вероятность ложного предупреждения (P fa) при выходе детектора в виде безразмерного скаляра. Значение по умолчанию равняется 10–6 ( |
| Number of Pulses | Количество импульсов в когерентном интервале обработки (CPI) в виде положительного целочисленного скаляра. |
| Pulse Integration | Импульсное интегрирование в виде |
Moving Target Indicator (MTI) — Перемещение целевого индикатораВыберите Moving Target Indicator (MTI), чтобы включать движущуюся целевую обработку индикатора в ваш проект. Если вы позволяете переместить целевую обработку индикатора, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Canceler | Компенсатор в виде одного из них:
|
| Null Velocity | Создайте помехи скорости, к которой фильтр MTI настроен в виде скаляра в m/s, km/hr, mi/hr, или kts. |
| Method | Метод, чтобы выполнить MTI, обрабатывающий в виде одного из них:
|
| Quadrature Processing | Выберите Quadrature Processing, чтобы включить квадратурному каналу (векторный) MTI, обрабатывающий для вашего проекта. Если этот параметр не выбран, Radar Designer выполняет одноканальную обработку MTI. |
Эта опция доступна, если Pulse Integration установлен в Noncoherent.
Binary Pulse Integration — Бинарное импульсное интегрированиеЗадайте, как выполнить двоичный файл (M-of-N) импульсное интегрирование как один из них:
None — Radar Designer не применяет бинарное интегрирование.
Automatic — Radar Designer применяет бинарное интегрирование и вычисляет оптимальное количество обнаруженных импульсов (M) из общего количества импульсов (N).
Custom — Radar Designer применяет бинарную интеграцию с вручную конкретным количеством обнаруженных импульсов. Если вы выбираете эту опцию, задаете Number of Detected Pulses (M) из общего количества импульсов (N) как положительное целое число.
Эта опция доступна, если Pulse Integration установлен в Noncoherent.
Constant False Alarm Rate (CFAR) — Включайте постоянное ложное сигнальное обнаружение уровняВыберите Constant False Alarm Rate (CFAR), чтобы включить обнаружение постоянного ложного сигнального уровня (CFAR). Если вы включаете обнаружение CFAR, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Number of Reference Cells | Общее количество ссылки CFAR (учебные) ячейки в виде положительного целочисленного скаляра. |
| Method | Метод обнаружения CFAR в виде одного из них:
|
Number of CPIs — Количество когерентных интервалов обработкиЗадайте количество когерентных интервалов обработки (ЗНАКИ НА ДЮЙМ) как положительный целочисленный скаляр.
M-of-N CPI Integration — Включите M-of-N интегрирование ЗНАКОВ НА ДЮЙМВыберите M-of-N CPI Integration, чтобы включить M-of-N интегрирование когерентных интервалов обработки (ЗНАКИ НА ДЮЙМ). Если вы включаете M-of-N интегрирование ЗНАКОВ НА ДЮЙМ, можно установить этот параметр.
| Параметр | Описание |
|---|---|
| Number of CPIs with Detection | Количество когерентных интервалов обработки с заявленным обнаружением (M) из общего количества ЗНАКОВ НА ДЮЙМ (N) в виде безразмерного скаляра. |
Sensitivity Time Control (STC) — Контроль времени чувствительностиВыберите Sensitivity Time Control, чтобы включить контроль времени чувствительности в вашем проекте. Если вы включаете контроль времени чувствительности, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Cutoff Range | Область значений сокращения, вне которой полное усиление приемника используется в виде скаляра в m, km, nmi, ft, или kft. Значение по умолчанию: 50 км. |
| Exponent | Экспонента, выбранная, чтобы обеспечить целевую обнаружительную способность для областей значений в области значений сокращения. Значение по умолчанию: 3.5. |
Track Confirmation Logic — Отследите вероятности подтвержденияИспользуйте Общий Алгоритм Истории Логического элемента, чтобы вычислить вероятности подтверждения дорожки. Можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Confirmation Threshold | Порог подтверждения в виде двух положительных целочисленных скаляров, которые представляют M-of-N или M/N логика подтверждения. Значение по умолчанию: 2/3. |
Update Rate или Update Time | Частота обновления или время обновления:
Значение по умолчанию: 1 Гц или 1 с. |
Loss Factors — Коэффициенты потерьИспользуйте эти параметры, чтобы задать коэффициенты потерь.
| Параметр | Описание |
|---|---|
| Eclipsing | Затмение потери в виде None (значение по умолчанию), Range-Dependent Factor, или Statistical Loss. |
| Custom Loss | Пользовательская потеря в виде скаляра в dB или linear модули. Значение по умолчанию: 4 дБ. |
Target — Целевые характеристикиЧтобы включить параметры Target, добавьте по крайней мере один радар в приложение.
| Параметр | Описание |
|---|---|
| Radar Cross Section | Эффективная площадь рассеивания в виде скаляра в m2 или dBsm. |
| Swerling Model | Модель Swerling в виде Swerling 0/5, Swerling 1, Swerling 2, Swerling 3, или Swerling 4. |
Height или Elevation Angle | Высота или угол возвышения в виде скаляра.
|
| Max Acceleration | Максимальное ускорение в виде скаляра в m2 или в модулях g. |
Environment — Среда и осадкиИспользуйте вкладку Environment, чтобы включить эффекты из-за искривления земли, атмосферы, ландшафта и осадков.
Atmosphere and Surface — Атмосфера и поверхностные характеристикиЗадайте атмосферу и поверхностные характеристики, чтобы использовать сезонные модели широты, поверхность и поверхностные настройки помехи.
По умолчанию. Radar Designer выбрали параметр Free Space. Эта опция соответствует распространению в вакууме, и единственной переменной, которой можно управлять, является Precipitation. Чтобы получить доступ к другим опциям, очистите поле.
Earth Model — Модель EarthЗадайте Earth Model как Curved или Flat. Используя кривой Earth модель предоставляет доступ к большему количеству моделей атмосферы и позволяет вам управлять Effective Earth Radius.
Atmosphere Model — Тип атмосферыЗадайте тип атмосферы, через которую радарный сигнал распространяет как No Atmosphere, Uniform, Standard, Low Latitude, Mid Latitude, или High Latitude.
No Atmosphere — Никакая атмосфераЗадайте No Atmosphere использовать постоянный индекс преломления 1. Эта модель не включает атмосферную газовую потерю или потерю эффекта линзы.
Uniform — Универсальная атмосфераЗадайте Uniform для атмосферы с универсальной температурой, давлением и плотностью водяного пара. Эта модель может включить атмосферную газовую потерю, но не потерю эффекта линзы. Можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Ambient Temperature | Температура универсальной атмосферы в виде скаляра в C или K. Значение по умолчанию: 15 °C. |
| Dry Air Pressure | Сухое давление воздуха универсальной атмосферы в виде скаляра в hPa, Pa, или mbar. Значение по умолчанию: 1 013 гПа. |
| Water Vapor Density | Плотность водяного пара универсальной атмосферы в виде скаляра в гр/м3 или g/cm3. Значение по умолчанию: 7,5 гр/м3. |
| Include Atmospheric Gases Loss | Выберите, чтобы включить потерю на пути из-за атмосферы газообразное поглощение. |
Standard — Среднее значение ITU ежегодная глобальная ссылочная атмосфераЗадайте Standard, чтобы использовать Среднюю ежегодную глобальную ссылочную атмосферу (MAGRA) ITU, рекомендуемую в ITU-R P.835-6 [1]. Эта опция применяется, только если Earth Model задан как Curved. Можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Water Vapor Density Profile | Плотность водяного пара профилирует в виде Automatic или Custom. Используйте этот параметр, чтобы использовать настройки, рекомендуемые в ITU-R P.835-6 или использовать ваши собственные настройки плотности водяного пара и шкалы высот. |
| Surface Water Vapor Density | Плотность пара поверхностной воды в виде скаляра в Этот параметр применяется, только если Water Vapor Density Profile задан как |
| Scale Height | Шкала высот в виде скаляра в Этот параметр применяется, только если Water Vapor Density Profile задан как |
| Include Atmospheric Gases Loss | Выберите, чтобы включить потерю на пути из-за атмосферы газообразное поглощение. |
| Include Lens Effect Loss | Выберите, чтобы включить потерю эффекта линзы из-за изменяющегося индекса преломления в атмосфере. Этот эффект является значительным только в маленьких углах падения. |
Low Latitude — Модель атмосферы ITU для широт меньше чем 22 градусаЗадайте Low Latitude, чтобы использовать модель атмосферы ITU для широт меньше чем 22 °, рекомендуемые в ITU-R P.835-6 [1]. Эта опция применяется, только если Earth Model задан как Curved. Можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Include Atmospheric Gases Loss | Выберите, чтобы включить потерю на пути из-за атмосферы газообразное поглощение. |
| Include Lens Effect Loss | Выберите, чтобы включить потерю эффекта линзы из-за изменяющегося индекса преломления в атмосфере. Этот эффект является значительным только в маленьких углах падения. |
Mid Latitude — Модель атмосферы ITU для широт от 22 градусов до 45 градусовЗадайте Mid Latitude, чтобы использовать модель атмосферы ITU для широт от 22 ° до 45 °, рекомендуемых в ITU-R P.835-6 [1]. Эта опция применяется, только если Earth Model задан как Curved. Можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Season | Сезон в виде Summer или Winter. |
| Include Atmospheric Gases Loss | Выберите, чтобы включить потерю на пути из-за атмосферы газообразное поглощение. |
| Include Lens Effect Loss | Выберите, чтобы включить потерю эффекта линзы из-за изменяющегося индекса преломления в атмосфере. Этот эффект является значительным только в маленьких углах падения. |
High Latitude — Модель атмосферы ITU для широт, больше, чем 45 градусовЗадайте High Latitude, чтобы использовать модель атмосферы ITU для широт, больше, чем 45 °, рекомендуемые в ITU-R P.835-6 [1]. Эта опция применяется, только если Earth Model задан как Curved. Можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Season | Сезон в виде Summer или Winter. |
| Include Atmospheric Gases Loss | Выберите, чтобы включить потерю на пути из-за атмосферы газообразное поглощение. |
| Include Lens Effect Loss | Выберите, чтобы включить потерю эффекта линзы из-за изменяющегося индекса преломления в атмосфере. Этот эффект является значительным только в маленьких углах падения. |
Effective Earth Radius — Эффективный Наземный радиусЗадайте Effective Earth Radius как один из них:
Automatic — Radar Designer вычисляет радиус автоматически на основе ссылочной атмосферы.
| Atmosphere Model | Эффективный наземный радиус |
|---|---|
No Atmosphere | 6 371 км |
Uniform | 6 371 км |
Standard | 8 719 км |
Low Latitude | 9 540 км |
Mid Latitude | 8 262 км |
High Latitude | 8 308 км |
Custom — Эта опция рекомендуется для высотных конфигураций. Задайте эффективный радиус Земли как скаляр в m, km, nmi, ft, или kft. Этот параметр часто устанавливается на 4/3 фактического радиуса Земли.
Surface Type — Тип поверхностиЗадайте тип поверхности, на которой радарный сигнал распространяет как Featureless, Sea, Land, или Custom.
Featureless — Характеристики совершенно сглаженной, совершенно отражающей поверхностиЕсли вы задаете Surface Type как Featureless, можно установить параметр Propagation Factor, который доступен, только если вы устанавливаете Earth Model к Curved. Propagation Factor является off по умолчанию.
Sea — Морские характеристикиЕсли вы задаете Surface Type как Sea, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Sea State Number | Номер волнения моря в виде одного из них:
|
| Include Radar Propagation Factor | Радарным фактором распространения является отношение величины фактического магнитного поля в точке в пространстве к величине магнитного поля в той же точке в свободном пространстве. Этот параметр доступен, только если вы устанавливаете Earth Model на |
| Permittivity Model | Модель Permittivity в виде одного из них:
Этот параметр применяется, только если Include Radar Propagation Factor выбран. |
Land — Посадите характеристикиЕсли вы задаете Surface Type как Land, можно установить эти параметры.
| Land Type | Посадите тип в виде одного из них:
|
| Include Radar Propagation Factor | Радарным фактором распространения является отношение величины фактического магнитного поля в точке в пространстве к величине магнитного поля в той же точке в свободном пространстве. Этот параметр доступен, только если вы устанавливаете Earth Model на |
| Vegetation Type | Тип растительности в виде одного из них:
Этот параметр применяется, только если Include Radar Propagation Factor выбран. |
| Permittivity Model | Модель Permittivity в виде одного из них:
Этот параметр применяется, только если Include Radar Propagation Factor выбран. |
Custom — Пользовательская поверхностьЕсли вы задаете Surface Type как Custom, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Height Standard Deviation | Поверхностное стандартное отклонение высоты в виде скаляра в m, km, nmi, ft, или kft. |
| Include Radar Propagation Factor | Радарным фактором распространения является отношение величины фактического магнитного поля в точке в пространстве к величине магнитного поля в той же точке в свободном пространстве. Этот параметр доступен, только если вы устанавливаете Earth Model на |
| Slope | Поверхностный наклон в виде скаляра в Этот параметр применяется, только если Include Radar Propagation Factor выбран. |
| Permittivity | Поверхностная проницаемость в виде скаляра с комплексным знаком в F/m. Значение по умолчанию: (28.5 – j 11.5) F/m. |
Свойства Custom
Surface Type не имеет никакой зависимости от частоты.
Clutter Properties — Создайте помехи характеристикамМожно задать эти свойства помехи.
| Параметр | Описание |
|---|---|
| Gamma | Поверхностная гамма (γ) параметр в виде скаляра в Значение γ для системы, действующей на частоте f, γ = γ 0 + 5 log10 (f/f0), где γ 0 является значением γ в f 0 = 10 ГГц и определяется измерением. Этот параметр применяется, только если Surface Type задан как |
| Clutter Velocity Specification | Создайте помехи скорости в виде одного из них:
Этот параметр применяется, только если Surface Type задан как |
| Polarization Dependence | Зависимость поляризации в виде Этот параметр применяется, только если Surface Type задан как |
| Clutter Velocity | Создайте помехи скорости в виде скаляра в Этот параметр применяется, только если Polarization Dependence задан как |
| H-pol Clutter Velocity | Создайте помехи скорости для горизонтальной поляризации в виде скаляра в Этот параметр применяется, только если Polarization Dependence задан как |
| V-pol Clutter Velocity | Создайте помехи скорости для вертикальной поляризации в виде скаляра в Этот параметр применяется, только если Polarization Dependence задан как |
| Clutter Velocity Standard Deviation | Создайте помехи стандартному отклонению скорости (скоростное распространение помехи) в виде скаляра в m/s, km/hr, mi/hr, или kts. |
Precipitation — Характеристики осадковЗадайте Precipitation Type во время распространения радарного сигнала как None, Rain, Snow, Fog, или Clouds использовать дождь, снег, вуаль и модели облака с настройками области значений.
Rain — Лейтесь характеристикамиЕсли вы задаете Precipitation Type как Rain, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Model | Модель дождя в виде одного из них:
|
| Precipitation Start Range | Запустите область значений закрашенной фигуры осадков в виде скаляра в m, km, nmi, ft, или kft. |
| Precipitation Range Extent | Степень области значений осадков исправляет в виде положительной скалярной величины в m, km, nmi, ft, или kft. |
| Rain Rate | Долгосрочный статистический уровень дождя в виде скаляра в мм/час. |
| Statistical Percentage | Статистический Процент в виде безразмерного скаляра, не меньшего, чем 0,001 и не больше, чем 1. Этот параметр возвращает затухание для заданного процента времени и применяется, только если Model задан как ITU. |
Snow — Характеристики снегаЕсли вы задаете Precipitation Type как Snow, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Precipitation Start Range | Запустите область значений закрашенной фигуры осадков в виде скаляра в m, km, nmi, ft, или kft. |
| Precipitation Range Extent | Степень области значений осадков исправляет в виде положительной скалярной величины в m, km, nmi, ft, или kft. |
| Snow Rate | Уровень снега в виде:
|
| Liquid Water Content | Жидкое содержание воды в виде скаляра в мм/час. Этот параметр применяется, только если Snow Rate задан как Custom. Умеренный уровень снега от 1 мм/час до 2,5 мм/час. |
Radar Designer использует модель [3] Gunn-East, чтобы вычислить потерю снега.
Fog — Вуалируйте характеристикиЕсли вы задаете Precipitation Type как Fog, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Precipitation Start Range | Запустите область значений закрашенной фигуры осадков в виде скаляра в m, km, nmi, ft, или kft. |
| Precipitation Range Extent | Степень области значений осадков исправляет в виде положительной скалярной величины в m, km, nmi, ft, или kft. |
| Temperature | Вуалируйте температуру окружающей среды в виде скаляра в C или K. |
| Fog Density | Вуалируйте жидкую водную плотность, заданный один из них:
|
| Liquid Water Density | Жидкая водная плотность в виде скаляра в гр/м3 или g/cm3. Этот параметр применяется, только если Fog Density задан как Custom. |
Radar Designer использует модель вуали/облака ITU от ITU-R P.840-6. Модель не рекомендуется для наклонного распространения пути.
Clouds — Характеристики облакаЕсли вы задаете Precipitation Type как Clouds, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Precipitation Start Range | Запустите область значений закрашенной фигуры осадков в виде скаляра в m, km, nmi, ft, или kft. |
| Precipitation Range Extent | Степень области значений осадков исправляет в виде положительной скалярной величины в m, km, nmi, ft, или kft. |
| Cloud Type | Тип облаков в виде одного из них:
|
| Liquid Water Density | Жидкая водная плотность в виде скаляра в гр/м3 или g/cm3. Этот параметр применяется, только если Fog Density задан как Custom. |
Radar Designer использует модель вуали/облака ITU от ITU-R P.840-6. Модель не рекомендуется для наклонного распространения пути.
Metric — Решение для основного уравнения радиолокации и ограничениеЗадайте количество, для которого можно решить основное уравнение радиолокации и количество, чтобы сохранить зафиксированным при решении.
Probability of Detection
![]() — Вычислите вероятность обнаружения (P d) и другие метрики ограничение области значений имеющее. Укажите максимальный диапазон как скаляр в
— Вычислите вероятность обнаружения (P d) и другие метрики ограничение области значений имеющее. Укажите максимальный диапазон как скаляр в m, km, nmi, ft, или kft.
Maximum Range
![]() — Вычислите максимальную область значений и другие метрики с вероятностью обнаружения (P d) ограничение. Задайте вероятность обнаружения как скаляр в десятичных модулях.
— Вычислите максимальную область значений и другие метрики с вероятностью обнаружения (P d) ограничение. Задайте вероятность обнаружения как скаляр в десятичных модулях.
Выбранное ограничение появляется наверху таблицы во вкладке Metrics and Requirements.
Metrics and Requirements — Радарные конструктивные ограниченияИспользуйте вкладку Metrics and Requirements, чтобы настроить и изменить метрики, требуемые для сравнительного анализа получить желаемую эффективность и удовлетворить вашим радарным конструктивным требованиям. Вкладка использует ту же расцветку в качестве Графика Стоп-сигнала и показывает метрики в таблице.
Чтобы сгенерировать отформатированный отчет числовых метрик, нажмите Export на панели инструментов и выберите Generate Metrics Report.
| Метрика | Описание |
|---|---|
| Probability of Detection | Вероятность обнаружения в виде безразмерного скаляра. Это - первая запись в таблице, если вы задаете Учитывая максимальную область значений R макс. задан в SNRav (R макс.) = Dx (P d, P fa, N, SW), где SNRav является Доступным Отношением сигнал-шум, Dx является эффективным Фактором Обнаружительной способности, P fa является выбранной вероятностью ложного предупреждения, N является количеством полученных импульсов, и SW является моделью сигнала Swerling. |
| Max Range | Максимальная область значений в виде скаляра в Учитывая желаемую вероятность обнаружения P d заданный в SNRav (R макс.) = Dx (P d, P fa, N, SW), где SNRav является Доступным Отношением сигнал-шум, Dx является эффективным Фактором Обнаружительной способности, P fa является выбранной вероятностью ложного предупреждения, N является количеством полученных импульсов, и SW является моделью сигнала Swerling. |
| Min Detectable Signal | Минимальный обнаруживаемый сигнал в виде скаляра в Минимальный обнаруживаемый сигнал вычисляется с помощью MDS = k T sBDx, где k является константой Больцманна, T s является шумовой температурой, B является полосой пропускания, и Dx является фактором обнаружительной способности. |
| Min Range | Минимальная область значений в виде скаляра в Минимальная область значений вычисляется с помощью Min R = c τ/2, где c является скоростью света, и τ является импульсной длительностью. |
| Unambiguous Range | Однозначная область значений в виде скаляра в Однозначная область значений вычисляется с помощью R ua = c × PRI/2 = c / (2 × PRF), где c является скоростью света, PRI является импульсным интервалом повторения, и PRF является импульсной частотой повторения. |
| Range Resolution | Разрешение области значений в виде скаляра в Разрешение области значений вычисляется с помощью δ R = c / (2 × B), где c является скоростью света, и B является шириной полосы пропускания импульса. |
| First Blind Speed | Первая слепая скорость в виде скаляра в m/s. Максимальная однозначная радиальная скорость (однозначный Доплер) вычисляется с помощью V rmax = λ × PRF/4, где λ является радарной длиной волны, и PRF является импульсной частотой повторения. |
| Range Rate Resolution | Разрешение уровня области значений в виде скаляра в m/s. Разрешение уровня области значений вычисляется с помощью δ V r = λ × PRF / (2N), где λ является радарной длиной волны, PRF является импульсной частотой повторения, и N является количеством полученных импульсов. |
| Range Accuracy | Точность области значений в виде скаляра в Точность области значений для импульса линейной частоты модулируется (LFM) вычисляется с помощью где c является скоростью света, ОСШ является доступным отношением сигнал-шум, B является шириной полосы пропускания импульса и b r2 смещение области значений. |
| Azimuth Accuracy | Точность азимута в виде скаляра в Точность азимута для M - универсальная линейная матрица (ULA) элемента вычисляется с помощью где θ e является шириной луча азимута, ОСШ является доступным отношением сигнал-шум, k является фактором ширины луча (k = 0.89 для ULA), и b, θ является смещением азимута. |
| Elevation Accuracy | Точность вертикального изменения в виде скаляра в Точность вертикального изменения для M - универсальная линейная матрица (ULA) элемента вычисляется с помощью где θ e является шириной луча вертикального изменения, ОСШ является доступным отношением сигнал-шум, k является фактором ширины луча (k = 0.89 для ULA), и b, θ является смещением вертикального изменения. |
| Range Rate Accuracy | Точность уровня области значений в виде скаляра в m/s. Точность уровня области значений для импульсов N, когерентно обработанных во время когерентного интервала обработки, вычисляется с помощью где PRF является импульсной частотой повторения, λ является радарной длиной волны, ОСШ является доступным отношением сигнал-шум, B является шириной полосы пропускания импульса, и RR b является смещением уровня области значений. |
| Probability of True Track | Вероятность истинной дорожки в виде безразмерного скаляра. Вероятность истинной дорожки вычисляется с помощью общего алгоритма истории логического элемента. Для получения дополнительной информации смотрите |
| Probability of False Track | Вероятность ложной дорожки в виде безразмерного скаляра. Вероятность ложной дорожки вычисляется с помощью общего алгоритма истории логического элемента. Для получения дополнительной информации смотрите |
| Effective Isotropic Radiated Power | Эффективная изотропная излученная степень в виде скаляра в Эффективная излучаемая мощность вычисляется с помощью ERP = P tGtx, то, где P t является пиком, передало степень, и G tx является усилением антенны передатчика. |
| Power-Aperture Product | Произведение апертурной мощности в виде скаляра в |
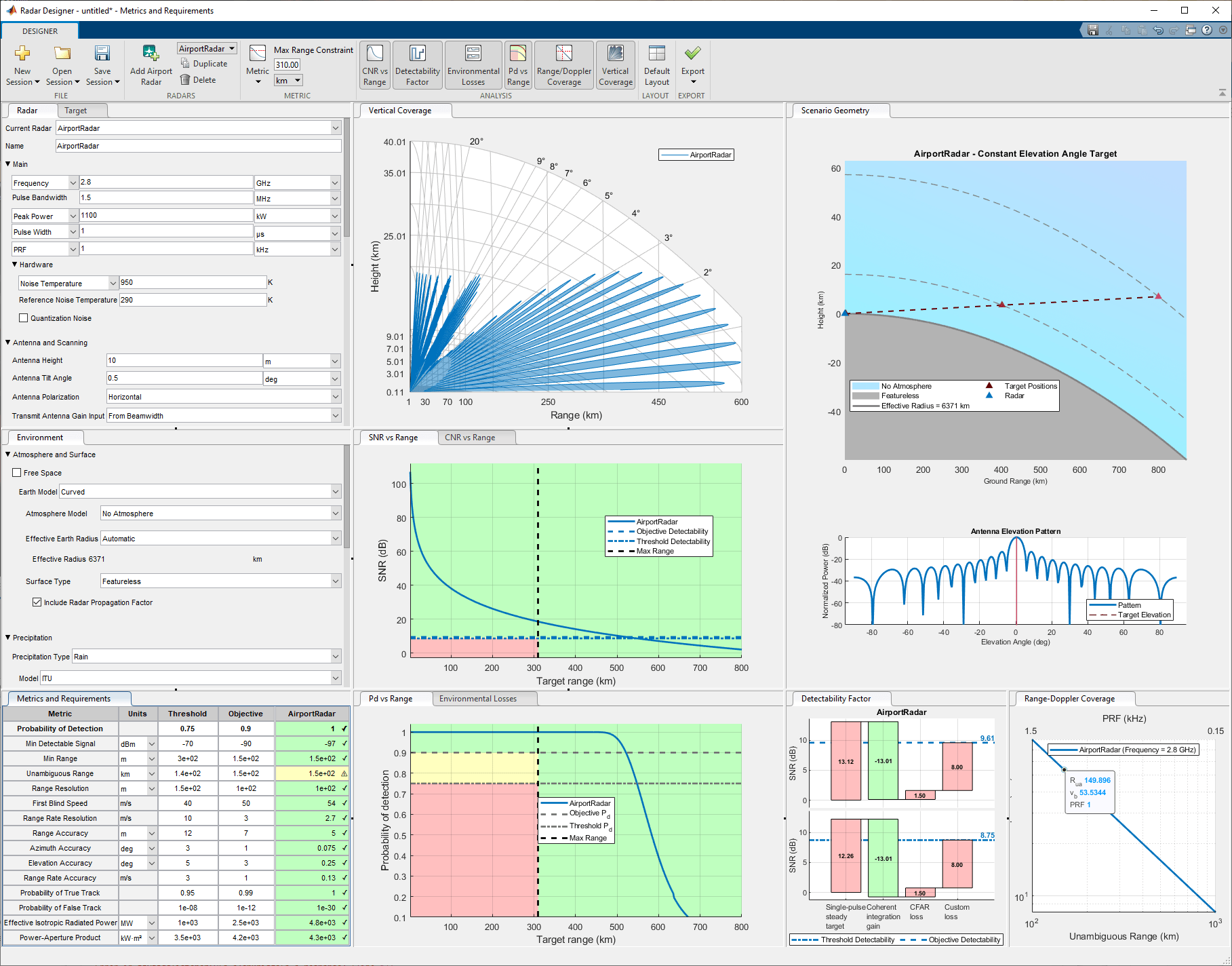
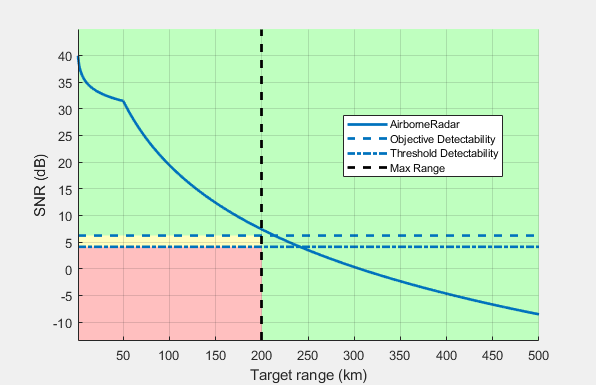
SNR vs Range — Доступная визуализация отношения сигнал-шумДля каждого радарного сеанса проекта Radar Designer отображает Доступное Отношение сигнал-шум (SNR) во входе приемника в зависимости от целевого диапазона. График показывает максимальные требования области значений и График Стоп-сигнала на основе фактора обнаружительной способности (требуемый ОСШ) значения.
Этот график показывает график отношения сигнал-шум для одного бортового радара с настройками по умолчанию. Для получения дополнительной информации смотрите Настройки Radar Designer.
Чтобы сгенерировать скрипт, чтобы воссоздать график отношения сигнал-шум для в настоящее время выбранного радара, нажмите Export на панели инструментов и выберите Export SNR vs Range MATLAB Script.
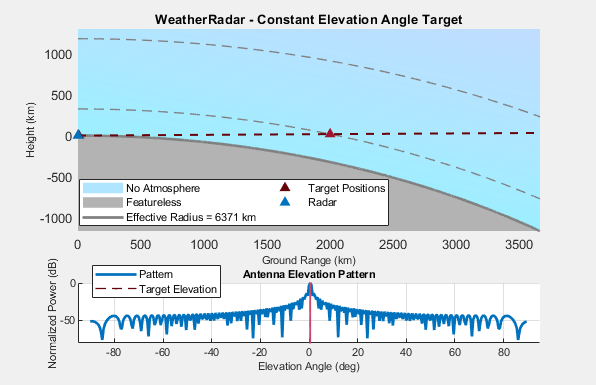
Scenario Geometry — Геометрическая и экологическая визуализацияДля каждого радарного сеанса проекта Radar Designer отображает вкладку Scenario Geometry, которая показывает эту информацию:
Среда (изогнутая Земля, плоская Земля, свободное пространство)
Радарная высота антенны
Целевая высота и положение в различных областях значений (постоянное вертикальное изменение или постоянная высота)
Радарный шаблон антенны, демонстрирующий прикладной угол наклона
Этот график показывает график геометрии сценария для одного погодного радара с настройками по умолчанию на кривой Земле. Для получения дополнительной информации смотрите Настройки Radar Designer.
Analysis — Область значений/Доплер, обнаружительная способность и другие графикиЗадайте графики использовать, чтобы визуализировать и анализировать ваш радарный проект.
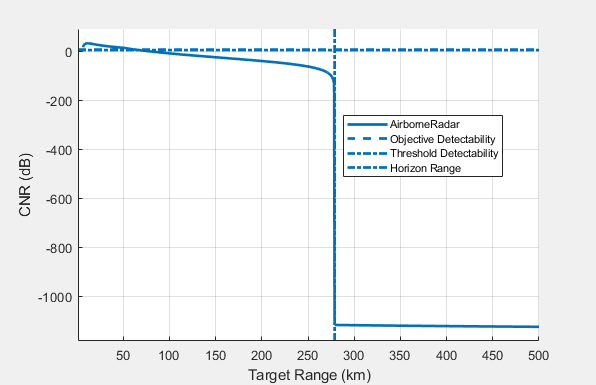
CNR vs Range
![]() — Просмотрите отношение помехи к шуму по сравнению с областью значений для всех проектов
— Просмотрите отношение помехи к шуму по сравнению с областью значений для всех проектов
Чтобы визуализировать отношение помехи к шуму (CNR) в зависимости от области значений для ваших радарных проектов, нажмите CNR vs Range на панели инструментов.
Radar Designer отображает CNR в дБ и показывает область значений горизонта.
Этот график показывает график отношения помехи к шуму для одного бортового радара с настройками по умолчанию. Для получения дополнительной информации смотрите Настройки Radar Designer.
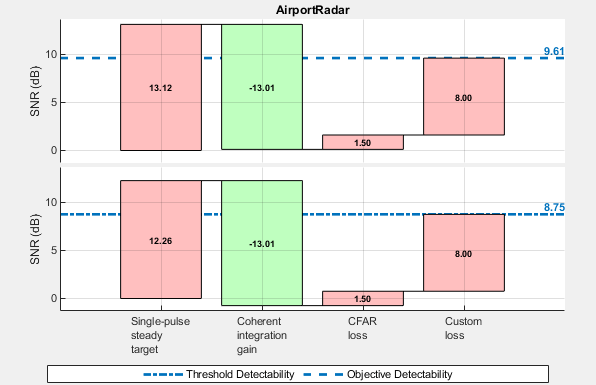
Detectability Factor
![]() — Смотрите прибыли и убытки в настоящее время выбранного радара
— Смотрите прибыли и убытки в настоящее время выбранного радара
Чтобы визуализировать прибыли и убытки для ваших радарных проектов, нажмите Detectability Factor на панели инструментов.
Модели Radar Designer несколько компонентов радарной цепи обработки сигналов, которые влияют на получившийся Фактор Обнаружительной способности. Отображения приложения график водопада, который показывает отдельные потери и усиления, которые способствуют увеличению необходимой энергии сигнала.
Потери, представленные в красном, увеличивают необходимый порог ОСШ.
Усиления, представленные в зеленом, уменьшают необходимый порог ОСШ.
Отсканируйте график слева направо, чтобы видеть, как фактор обнаружительной способности изменяется, когда добавляются эти компоненты:
Устойчиво-целевая одно-импульсная обнаружительная способность
Усиление интегрирования
Потеря колебания
Бинарная потеря интегрирования
Потеря CFAR
Затмение потери
Потеря MTI
Излучите потерю формы
Отсканируйте потерю сектора
Этот график показывает график фактора обнаружительной способности для одного радара аэропорта с настройками по умолчанию. Для получения дополнительной информации смотрите Настройки Radar Designer.
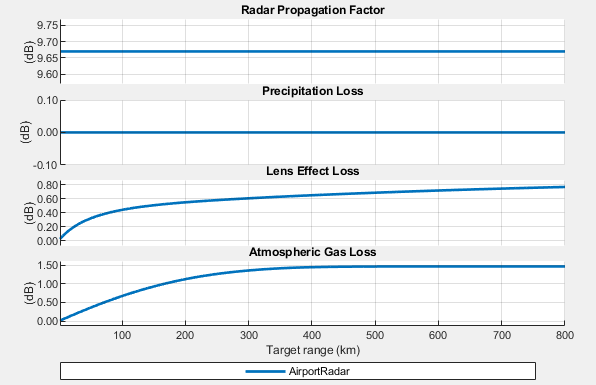
Environmental Losses
![]() — Просмотрите экологические потери для в настоящее время выбранного радара
— Просмотрите экологические потери для в настоящее время выбранного радара
Чтобы визуализировать зависимые областью значений компоненты потерь для ваших радарных проектов в их рабочих средах, нажмите Environmental Losses на панели инструментов.
Radar Designer отображает четыре зависимых областью значений компонента потерь, которые соответствуют отличающийся атмосферный и эффекты распространения:
Потеря осадков
Атмосферная газовая потеря
Потеря эффекта линзы
Радарный фактор распространения
Этот график показывает экологический график потерь для одного радара аэропорта с настройками по умолчанию с помощью модели атмосферы высокой широты. Для получения дополнительной информации смотрите Настройки Radar Designer.
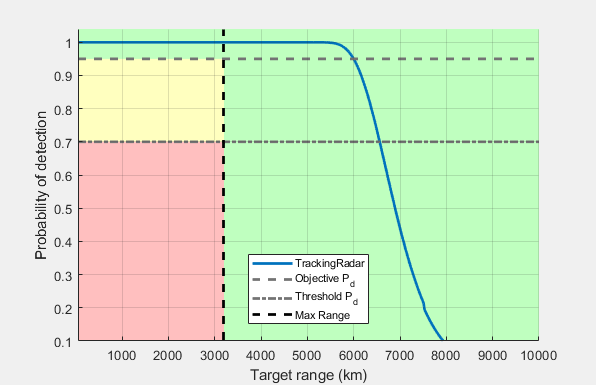
Pd vs Range
![]() — Покажите вероятность обнаружения (P d) по сравнению с областью значений для всех проектов
— Покажите вероятность обнаружения (P d) по сравнению с областью значений для всех проектов
Чтобы визуализировать вероятность обнаружения в зависимости от области значений для ваших радарных проектов, нажмите Pd vs Range на панели инструментов.
Radar Designer отображает вероятность обнаружения при выходе приемника (эффективный P d) в зависимости от целевого диапазона. График показывает максимальные требования области значений и График Стоп-сигнала на основе желаемого P d значения.
Этот график показывает вероятность обнаружения по сравнению с графиком области значений для одного радара отслеживания с настройками по умолчанию. Для получения дополнительной информации смотрите Настройки Radar Designer.
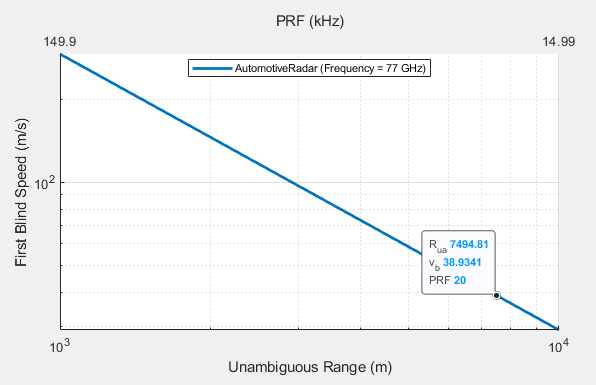
Range/Doppler Coverage
![]() — Исследуйте пробел области значений/Доплера для в настоящее время выбранного радара
— Исследуйте пробел области значений/Доплера для в настоящее время выбранного радара
Чтобы визуализировать зоны обслуживания области значений/Доплера без неоднозначности для ваших радарных проектов, нажмите Range/Doppler Coverage на панели инструментов.
Radar Designer отображает график логарифмического журнала первой слепой скорости в зависимости от однозначной области значений (более низкая ось X) и PRF (верхняя ось X). Каждая сплошная линия на графике представляет радарный проект. Проекты с различными несущими частотами появляются как параллельные линии.
Этот график показывает график покрытия области значений/Доплера для одного автомобильного радара с настройками по умолчанию. Для получения дополнительной информации смотрите Настройки Radar Designer.
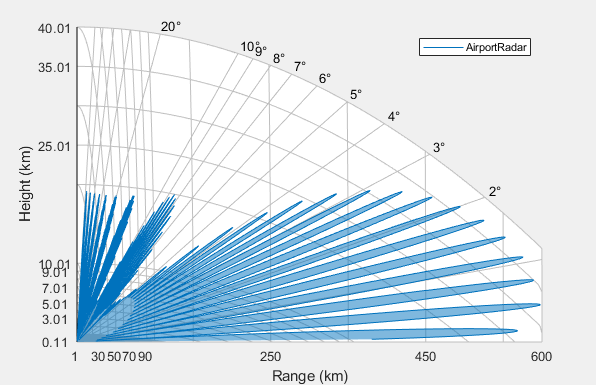
Vertical Coverage
![]() — Постройте график Блэйка для в настоящее время выбранного радара
— Постройте график Блэйка для в настоящее время выбранного радара
Чтобы визуализировать отношения угла высоты области значений для ваших радарных проектов, нажмите Vertical Coverage на панели инструментов.
Radar Designer отображает вертикальную схему покрытия выбранного радара. Вертикальные схемы покрытия, также известные как range-height-angle charts или Blake charts, показывают отношение между областью значений к цели, высоте цели, и начальным углом возвышения переданных лучей для датчика.
Этот график показывает вертикальную схему покрытия для одного радара аэропорта с настройками по умолчанию. Для получения дополнительной информации смотрите Настройки Radar Designer.
Чтобы сгенерировать скрипт, чтобы воссоздать вертикальный график покрытия для в настоящее время выбранного радара, нажмите Export на панели инструментов и выберите Export Vertical Coverage MATLAB Script.
Radar Designer включает радарные настройки, которые позволяют вам переключиться между радарными проектами, дублирующимися радарами, и удалить радары.
Эта таблица показывает значения параметров по умолчанию для встроенных настроек.
| Категория | Свойство | Радар | ||||
|---|---|---|---|---|---|---|
| Бортовой радар | Радар аэропорта | Автомобильный радар | Отслеживание радара | Погодный радар | ||
| Общий | Значок | |||||
| Описание | Бортовой радар наблюдения дальний | Терминальное наблюдение аэропорта | Автомобильный радар для использования в приложениях, таких как автоматический круиз-контроль | Наземный, выдал радиолокационную систему отслеживания | Очистите воздушный погодный радар | |
| Вдохновленный | Бортовой сценарий представлен в [5] | ASR-9 | Bosch LRR3, радары TI | ДАТЧАНИН КОБРЫ | NEXRAD (VCP 32) | |
| Основной | Частота | 450 МГц | 2.8 GHz | 77 ГГц | 1,25 ГГц | 2.8 GHz |
| Диапазон частот | УВЧ | S | W | L | S | |
| Пропускная способность | 4 МГц | 1.5 МГц | 300 МГц | 20 МГц | 0.5 МГц | |
| Пиковая мощность | 200 кВт | 1.1 MW | 30 мВт | 15 МВт | 500 кВт | |
| Ширина импульса | 200 μs | 1 μs | 50 μs | 1 мс | 1.5 μs | |
| PRF | 300 Гц | 1 кГц | 20 кГц | 1 кГц | 320 Гц | |
| Оборудование | Шумовая температура | 1500 K (шумовая фигура на 8 дБ со ссылочной температурой 290K) | 950 K | 8000 K | 800 K | 450 K |
| Антенна и сканирование | Высота антенны | 6 096 м (20 000 футов) | 10 м | 1 м | 75 м | 20 м |
| Наклон антенны | –1° | 0.5° | 0 | 10° | 0.5° | |
| Поляризация | Горизонталь | Горизонталь | Горизонталь | Горизонталь | Горизонталь | |
| Усиление | От ширины луча | От ширины луча | От ширины луча | От ширины луча | Руководство | |
| Азимут: 8 ° | Азимут: 1,5 ° | Азимут: 30 ° | Азимут: 1 ° | 45 дБ | ||
| Вертикальное изменение: 90 ° | Вертикальное изменение: 5 ° | Вертикальное изменение: 10 ° | Вертикальное изменение: 1 ° | |||
| Режим сканирования | Электронный | Механическое устройство | N/A | N/A | Механическое устройство | |
| Азимут ±30 ° | Полные 360 ° | Скан объема: Азимут: Полные 360 °. Вертикальное изменение: 0,5 ° к 5 ° | ||||
| Отсканируйте время | 0,05 с | 5 с | N/A | N/A | 10 минут | |
| Обнаружение | Вероятность ложного предупреждения | 10–6 | 10–6 | 10–6 | 10–6 | 10–3 |
| Количество импульсов в CPI | 18 | 20 | 256 | 1 | 64 | |
| Количество ЗНАКОВ НА ДЮЙМ | 1 | 1 | 1 | 1 | 1 | |
| Потери и другие входные параметры | Пользовательская потеря | 4 дБ | 8 дБ | 2 дБ | 2 дБ | 2 дБ |
| Другие входные параметры | STC 'on' параметрами по умолчанию | CFAR 'on' параметрами по умолчанию | N/A | N/A | N/A | |
CFAR 'on' параметрами по умолчанию | ||||||
MTI 'on' параметрами по умолчанию | MTI 'on' параметрами по умолчанию | |||||
| Получите усиление: 10 дБ | ||||||
Используйте Ctrl+Z, чтобы отменить модификацию. Используйте Ctrl+Y, чтобы восстановить отмененную модификацию.
[1] Рекомендация ITU-R P.835-6 (12/2017). "Ссылочные Стандартные Атмосферы". Женева: Международный союз электросвязи, 2017, https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.835-6-201712-I!! PDF-E.pdf.
[2] Бартон, основные уравнения радиолокации Дэвида К. для современного радара. Норвуд, MA: дом Artech, 2013.
[3] Ганн, K. L. S. и Т. В. Р. Ист. “Микроволновые Свойства Частиц Осадков”. Ежеквартальный журнал Королевского Метеорологического Общества 80, № 346 (октябрь 1954): 522–45. https://doi.org/10.1002/qj.49708034603.
[4] О'Доннелл, R. M. "Разработка радиолокационных систем". Общество AES IEEE, IEEE нью-гэмпширский раздел, курс радиолокационных систем, январь 2010.
[5] Опека, J. "Пространственно-временная Адаптивная Обработка для Бортового Радара". TR-1015, MIT Lincoln Laboratory, декабрь 1994. https://apps.dtic.mil/dtic/tr/fulltext/u2/a293032.pdf
[6] Уоссон, Анализ Системного проектирования Чарльза С., Проект и Разработка: Концепции, Принципы и Методы. Второй выпуск. Вайли Серис в Системном проектировании и управлении. Хобокен, Нью-Джерси: John Wiley & Sons Inc, 2016.
