Формирование цикла смешанной чувствительности позволяет вам спроектировать H ∞ контроллер путем одновременного формирования частотных характеристик для отслеживания и подавления помех, шумоподавления и робастности и усилия контроллера. Этот метод является полезным способом сбалансировать необходимый компромисс между эффективностью и робастностью (см., что Цикл Формирует для Эффективности и Робастности). Чтобы использовать этот метод, вы преобразуете свои желаемые ответы максимум в три функции взвешивания что mixsyn использование команды, чтобы синтезировать контроллер.
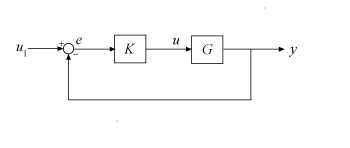
mixsyn проектирует контроллер K для вашего объекта G, принимая стандартную настройку управления следующей схемы.
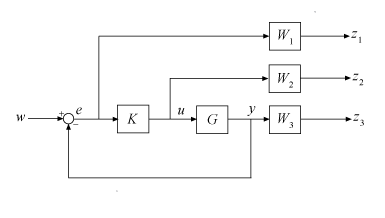
Для этого функция добавляет функции взвешивания, которые вы обеспечиваете, W 1 (s), W 2 (s) и W 3 (s), к системе управления, как показано в следующей схеме.
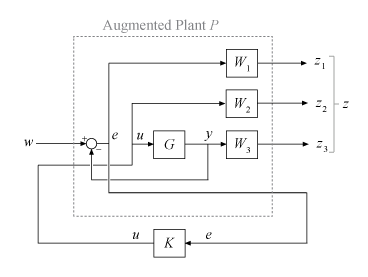
mixsyn обрабатывает проблему как H ∞ проблема синтеза (см. hinfsyn). Это анализирует взвешенную систему управления как LFT (P, K), где P является увеличенным объектом P, таким образом что {z; e} = P {w; u}, как показано в следующей схеме.
Передаточная функция от w до z может быть описана как
где
S = (I + GK)–1 функция чувствительности.
KS является передаточной функцией от w до u (усилие по управлению).
T = (I – S) = GK (I + GK)–1 дополнительная функция чувствительности.
mixsyn ищет контроллер K, который минимизирует || M (s) || ∞, H ∞ норма (пиковое усиление) M. Для этого это вызывает hinfsyn на увеличенном объекте P = augw(G,W1,W2,W3).
Усиление цикла for L = GK, чтобы достигнуть хорошего отслеживания уставки и подавления помех, вы обычно хотите высокое усиление цикла в низкой частоте. Чтобы достигнуть робастности и затухания шума измерения, вы обычно хотите, чтобы L прокрутился прочь на высокой частоте. Эта форма цикла эквивалентна маленькому S в низкой частоте и маленькому T на высокой частоте.
Для формирования цикла смешанной чувствительности вы выбираете функции взвешивания, чтобы задать те целевые формы для S и T, а также усилия по управлению KS. H ∞ конструктивное ограничение,
средние значения это
Поэтому вы устанавливаете веса, равные обратным величинам желаемых форм для S, KS и T. В частности,
Для хорошего отслеживания уставки и эффективности подавления помех, выберите W 1, большой в полосе пропускания управления, чтобы получить маленький S.
Для робастности и шумового затухания, выберите W 3, большой вне полосы пропускания управления, чтобы получить маленький T.
Чтобы ограничить усилие по управлению в конкретном диапазоне частот, увеличьте величину W 2 в этом диапазоне частот, чтобы получить маленький KS.
mixsyn возвращает минимум || M (s) || ∞ в выходном аргументе gamma. Для возвращенного контроллера K, затем,
Если вы не хотите ограничивать усилие по управлению, можно не использовать W 2. В этом случае, mixsyn минимизирует H ∞ норма
Можно использовать makeweight создать функции взвешивания с желаемыми профилями усиления. Следующий пример иллюстрирует, как выбрать и создать функции взвешивания для проектирования контроллера с mixsyn.
Не выбирайте функции взвешивания с полюсами очень близко к s = 0 (z = 1 для систем дискретного времени). Например, несмотря на то, что может казаться разумным выбрать W 1 = 1/s, чтобы осуществить нулевую установившуюся ошибку, делание так вводит нестабильный полюс, который не может быть стабилизирован, заставив синтез перестать работать. Вместо этого выберите W 1 = 1 / (s + δ). Значение δ должно быть малым, но не очень маленькое по сравнению с системной динамикой. Например, для лучших числовых результатов, если ваша целевая частота среза составляет приблизительно 1 рад/с, выбирают δ = 0.0001 или 0.001. Точно так же в дискретное время, выберите шаги расчета, таким образом, что система и динамика взвешивания составляют не больше чем десятилетие или два ниже частоты Найквиста.
Загрузите модель объекта управления для смешанной чувствительности проектирование контроллера. Этот 2D вход, 2D выход, модель с шестью состояниями описана в Проектировании контроллера Формирования Цикла в качестве примера.
load mixsynExampleData G size(G)
State-space model with 2 outputs, 2 inputs, and 6 states.
Чтобы спроектировать контроллер для эффективности и робастности, сформируйте чувствительность и дополнительные функции чувствительности. Выберите веса, которые являются инверсией желаемых форм.
Чтобы достигнуть хорошего отслеживания уставки и эффективности подавления помех, сформируйте S, чтобы быть малыми в полосе пропускания управления, что означает выбор W1 большой в низкой частоте, прокручивающейся прочь на высокой частоте. В данном примере задайте W1 с:
Низкочастотное усиление приблизительно 30 дБ (33 в абсолютных единицах)
Высокочастотное усиление приблизительно-6 дБ (0.5 в абсолютных единицах)
Перекрестное соединение на 0 дБ на уровне приблизительно 5 рад/с.
W1 = makeweight(33,5,0.5);
Для робастности и шумового затухания, сформируйте T быть малыми вне полосы пропускания управления, что означает выбор W3 большой на высокой частоте.
W3 = makeweight(0.5,20,20);
Исследуйте обе функции взвешивания. Их инверсии являются целевыми формами для S и T.
bodemag(W1,W3) yline(0,'--'); legend('W1','W3','0 dB') grid on

Поскольку S + T = I, mixsyn не может сделать оба S и T маленький (меньше чем 0 дБ) в том же частотном диапазоне. Поэтому, когда вы задаете веса, должен быть диапазон частот в который оба W1 и W3 ниже 0 дБ.
Используйте mixsyn вычислять оптимальный контроллер смешанной чувствительности с этими весами. В данном примере не наложите штраф на усилие контроллера установки W2 к [].
[K,CL,gamma] = mixsyn(G,W1,[],W3); gamma
gamma = 0.7331
Получившийся gamma, то, которое является пиковым сингулярным значением через все частоты, значительно ниже 1, указывая, что система с обратной связью соответствует конструктивным требованиям. Исследуйте получившиеся отклики системы. Во-первых, сравните получившуюся чувствительность S и дополнительная чувствительность T к соответствующим функциям взвешивания W1 и W3.
L = G*K; I = eye(size(L)); S = feedback(I,L); T= I-S; sigma(S,'b',W1,'b--',T,'r',W3,'r--',{0.1,1000}) legend('S','W1','T','W3')

График показывает тот S и T достигните желаемой формы цикла, где S является большим в полосе пропускания управления, и мал вне полосы пропускания управления.
Чтобы видеть, как формирование цикла смешанной чувствительности достигает целей классического формирования цикла, сравните ответ разомкнутого контура L к функциям взвешивания. L ~ W1 где W1 является большим, и L ~ 1/W3 где W3 является большим.
sigma(L,'b',W1,'r--',1/W3,'g--',{0.1,1000}) legend('L','W1','1/W3')

