Модель уменьшаемого порядка для UAV
UAV Toolbox / Алгоритмы
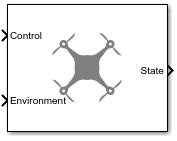
Блок Guidance Model представляет маленькую модель руководства беспилотного воздушного транспортного средства (UAV), которая оценивает состояние UAV на основе управления и экологических входных параметров. Модель аппроксимирует поведение системы с обратной связью, состоящей из контроллера автопилота и фиксированного крыла или мультиротора кинематическая модель для 3-D движения. Используйте этот блок в качестве модели руководства уменьшаемого порядка, чтобы симулировать ваше фиксированное крыло или мультиротор UAV. Задайте ModelType, чтобы выбрать ваш тип UAV. Используйте вкладку Initial State, чтобы задать начальное состояние UAV в зависимости от типа модели. Вкладка Configuration задает параметры управления и физические параметры UAV.
Для БПЛА фиксированного крыла следующие уравнения используются, чтобы задать модель руководства UAV. Используйте derivative функция, чтобы вычислить производную времени состояния UAV, использующего эти управляющие уравнения. Задайте входные параметры с помощью state, control, и environment функции.
Положением UAV в наземной системе координат является [xe, ye, h] с ориентацией как угол рыскания, угол угла тангажа и крен, [χ, γ, ϕ] в радианах.
В модели принимается, что UAV летит при условии скоординированного поворота с нулевым заносом. Автопилот управляет скоростью полета, высотой и креном. Соответствующие уравнения движения:
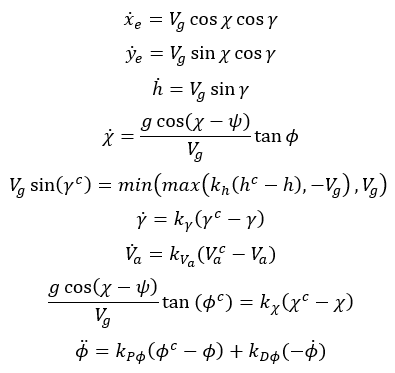
Va и Vg обозначают воздух UAV и скорости относительно земли.
Скорость ветра задана как [Vwn, Vwe, Vwd] для севера, востока, и вниз направлений. Чтобы сгенерировать структуру для этих входных параметров, используйте environment функция.
k* является усилениями контроллера. Чтобы задать эти усиления, используйте Configuration свойство fixedwing объект.
От этих управляющих уравнений модель дает следующие переменные: ![]()
Эти переменные совпадают с выходом state функция.
Для мультироторов следующие уравнения используются, чтобы задать модель руководства UAV. Чтобы вычислить производную времени состояния UAV, использующего эти управляющие уравнения, используйте derivative функция. Задайте входное использование state, control, и environment.
Положением UAV в наземной системе координат является [xe, ye, ze] с ориентацией как Углы Эйлера ZYX, [ψ, ϴ, ϕ] в радианах. Скоростями вращения является [p, q, r] в радианах в секунду.
Система координат тела UAV использует координаты в качестве [xb, yb, zb].
Матрица вращения, которая вращается от мира до системы координат тела:
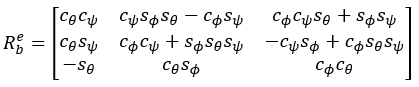
Because(x), и sin (x) сокращены как cx и sx.
Ускорением центра UAV массы в наземных координатах управляют:
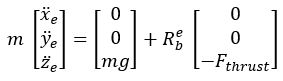
m является массой UAV, g является силой тяжести, и Fthrust является общей силой, созданной пропеллерами, применился к мультиротору вдоль –zb оси (точки вверх в горизонтальном положении).
Контроллер отношения тангажа крена с обратной связью аппроксимирует поведение 2 независимых контроллеров PD для этих двух углов поворота и 2 независимых контроллеров P для уровня рыскания и втискивают. Скоростью вращения, угловым ускорением и тягой управляют:
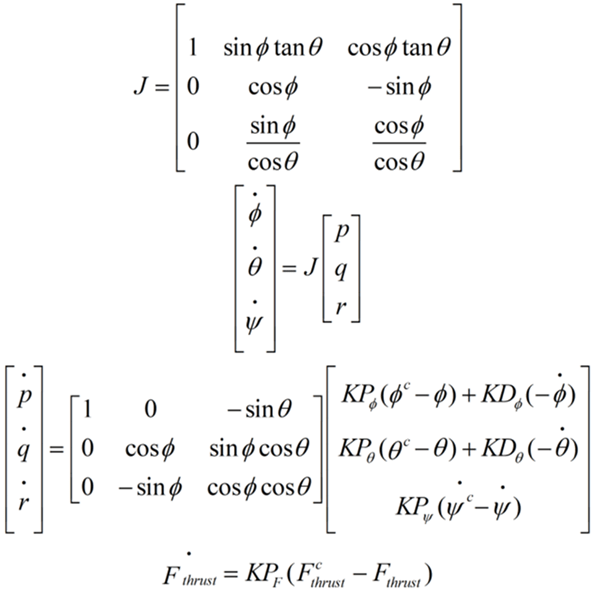
Эта модель принимает, что автопилот берет в крене, которым управляют, тангаже, уровне рыскания и общей силе тяги, которой управляют, Fcтяга. Структура, чтобы задать эти входные параметры сгенерирована от
и общей силе тяги, которой управляют, Fcтяга. Структура, чтобы задать эти входные параметры сгенерирована от control.
Усиления P и D для входных параметров управления заданы как KPα и KDα, где α является или углом поворота или тягой. Эти усиления наряду с массой UAV, m, заданы в Configuration свойство multirotor объект.
От этих управляющих уравнений модель дает следующие переменные: ![]()
Эти переменные совпадают с выходом state функция.
[1] Рэндал В. Бирд и Тимоти В. Маклэйн. "Глава 9". Маленькая беспилотная теория самолета и практика, NJ: Издательство Принстонского университета, 2012.
[2] Mellinger, Дэниел и Натан Майкл. "Генерация траектории и Управление для Точных Агрессивных Маневров с Quadrotors". Международный журнал Исследования Робототехники. 2012, стр 664-74.
ode45 | control | derivative | environment | state | plotTransforms