UAV Toolbox служит основой co-симуляции, которая моделирует ведущие алгоритмы в Simulink® и визуализирует их эффективность в виртуальной среде симуляции. Эта среда использует Нереальный Engine® от эпических игр®.
Блоки Simulink, связанные со средой симуляции, могут быть найдены в UAV Toolbox> библиотека блоков Simulation 3D. Эти блоки обеспечивают способность к:
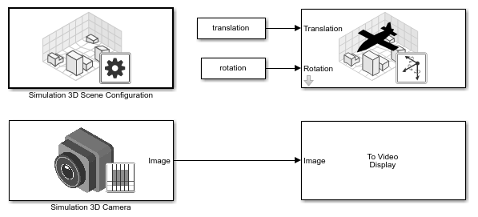
Сконфигурируйте предварительно созданные сцены в среде симуляции.
Поместите и переместите БПЛА в этих сценах.
Настройте камеру и лоцируйте датчики на транспортных средствах.
Симулируйте датчик выходные параметры на основе среды вокруг UAV.
Получите достоверные данные для получения информации о глубине и семантической сегментации.
Этот инструмент симуляции обычно используется, чтобы добавить действительные данные при разработке, тестируя и проверяя эффективность алгоритмов рейса UAV. В сочетании с моделью транспортного средства UAV можно использовать эти блоки, чтобы выполнить реалистические симуляции с обратной связью, которые охватывают целый стек управления полетом UAV от восприятия, чтобы управлять.
Для получения дополнительной информации о среде симуляции смотрите Как Нереальная Симуляция Engine для работ БПЛА.
Получить доступ к библиотеке UAV Toolbox> Simulation 3D, в MATLAB® командная строка, введите uavsim3dlib.
Чтобы сконфигурировать модель к co-simulate со средой симуляции, добавьте блок Simulation 3D Scene Configuration в модель. Используя этот блок, можно выбрать из предварительно созданной сцены, где можно протестировать и визуализировать ведущие алгоритмы. Следующее изображение от сцены US City Block.
Тулбокс включает эти сцены.
| Сцена | Описание |
|---|---|
| US City Block | Городской квартал с пересечениями, барьерами и светофором |
Если у вас есть Интерфейс UAV Toolbox для Нереального пакета поддержки Проектов Engine, то можно изменить эти сцены или создать новые единицы. Для получения дополнительной информации смотрите, Настраивают Нереальные Сцены Engine для БПЛА.
Чтобы задать виртуальное транспортное средство в сцене, добавьте блок Simulation 3D UAV Vehicle в свою модель. Используя этот блок, можно управлять перемещением транспортного средства путем предоставления этих X, Y, и значений рыскания, которые задают его положение и ориентацию на каждом временном шаге. Транспортное средство автоматически проходит земля.
Можно также задать цвет и тип транспортного средства. Тулбокс включает эти типы транспортного средства:
Можно задать виртуальные датчики и присоединить их в различных позициях по транспортным средствам. Тулбокс включает их моделирование датчика и блоки Configuration.
| Блок | Описание |
|---|---|
| Simulation 3D Camera | Модель камеры с линзой. Включает параметры для размера изображения, фокусного расстояния, искажения и скоса. |
| Simulation 3D Fisheye Camera | Fisheye-камера, которая может быть описана с помощью модели камеры Scaramuzza. Включает параметры для центра искажения, размера изображения и коэффициентов отображения. |
| Simulation 3D Lidar | Сканирование модели датчика лидара. Включает параметры для области значений обнаружения, разрешения и полей зрения. |
Для получения дополнительной информации о выборе датчика смотрите, Выбирают Sensor for Unreal Engine Simulation.
Блоки симуляции UAV Toolbox обеспечивают инструменты для тестирования и визуализации планирования пути, управления UAV и алгоритмов восприятия.
Можно использовать Нереальную среду симуляции Engine, чтобы визуализировать движение транспортного средства в предварительно созданной сцене. Эта среда предоставляет вам способ анализировать эффективность алгоритмов управления транспортного средства и планирования пути. После разработки этих алгоритмов в Simulink можно использовать uavsim3dlib библиотека, чтобы визуализировать движение транспортного средства в одной из предварительно созданных сцен.
UAV Toolbox обеспечивает несколько блоков для подробного моделирования датчика камеры и лидара. Путем монтирования этих датчиков на БПЛА в виртуальной среде можно сгенерировать синтетические данные о датчике или обнаружения датчика, чтобы проверить производительность моделей датчика против алгоритмов восприятия.
После того, как вы проектируете и тестируете систему восприятия в среде симуляции, можно затем использовать ее, чтобы управлять системой управления, которая на самом деле ведет транспортное средство. В этом случае, вместо того, чтобы вручную настроить траекторию, UAV использует систему восприятия, чтобы управлять собой. Путем объединения восприятия и управления в систему с обратной связью в 3D среде симуляции, можно разработать и протестировать более комплексные алгоритмы, такие как автоматизированная доставка.
