Данные о метке основной истины
groundTruth объект содержит информацию об источнике данных, определениях метки и отмеченных аннотациях метки для набора меток основной истины. Можно экспортировать или импортировать groundTruth объект от Image Labeler и приложений Video Labeler.
Создать обучающие данные для детектора объектов от массивов groundTruth объекты, используйте objectDetectorTrainingData функция.
Создать обучающие данные для сети семантической сегментации от массивов groundTruth объекты, используйте pixelLabelTrainingData функция.
Экспортировать groundTruth объект от приложения для маркировки, на панели инструментов приложения, выбирает Export Labels> To Workspace. Приложение экспортирует объект в MATLAB® рабочая область. Создать groundTruth возразите программно, используйте groundTruth функция (описанный здесь).
gTruth = groundTruth(dataSource,labelDefs,labelData)
dataSource задает источник достоверных данных и устанавливает DataSource свойство.
labelDefs задает метку, подметку и определения атрибута достоверных данных и устанавливает LabelDefinitions свойство.
labelData указывает информацию идентификации, положение, и устанавливает метку времени для отмеченных меток и устанавливает LabelData свойство.
DataSource — Источник достоверных данныхgroundTruthDataSource объектИсточник достоверных данных в виде groundTruthDataSource объект. Объект содержит информацию, которая описывает видео, последовательность изображений или пользовательский источник данных, от которых достоверных данных был помечен.
К изображениям доступа от первоначального источника данных используйте VideoReader или imageDatastore. Можно также использовать пользовательскую функцию чтения. Для получения дополнительной информации смотрите Исходного Читателя Пользовательского изображения Использования для Маркировки.
LabelDefinitions Определения метокЭто свойство доступно только для чтения.
Пометьте определения в виде таблицы. Чтобы составить эту таблицу, используйте одну из этих опций.
В одном из приложений для маркировки создайте определения метки, и затем экспортируйте их как часть groundTruth объект.
Используйте labelDefinitionCreator объект сгенерировать таблицу определений метки. Если вы сохранили эту таблицу к MAT-файлу, можно затем загрузить определения метки в сеанс приложения для маркировки путем выбора Load> Label Definitions от панели инструментов приложения.
Составьте таблицу определений метки в командной строке MATLAB.
Эта таблица описывает необходимые и дополнительные столбцы таблицы, заданной в LabelDefinitions свойство.
| Столбец | Описание | Требуемый или дополнительный |
|---|---|---|
Name | Строки или векторы символов, задающие имя каждого определения метки. | Необходимый |
Type | labelType перечисления, которые задают тип каждого определения метки, такого как Rectangle или Scene. | Необходимый |
LabelColor | 1 3 векторы-строки из триплетов RGB, которые задают цвета определений метки. Значения находятся в области значений [0, 1]. Желтый цвет (триплет RGB [1 1 0]) резервируется для цвета выбранных меток в приложениях для маркировки. | Дополнительный Когда вы задаете метки в приложении для маркировки, необходимо задать цвет. Поэтому экспортированная таблица определений метки всегда включает этот столбец. Когда вы создаете определения метки с помощью |
PixelLabelID | Скаляры, вектор-столбцы или M-by-3 матрицы метки IDs с целочисленным знаком. PixelLabelID указывает, что пиксельные значения метки раньше представляли определение метки. Значения идентификаторов метки Pixel должны быть между 0 и 255. | Дополнительный Когда вы задаете пиксельные метки в приложении для маркировки или При составлении таблицы определений метки в командной строке MATLAB, если вы устанавливаете |
Group | Строки или векторы символов, задающие группу, которой принадлежит каждое определение метки. | Дополнительный Если вы составляете таблицу определений метки в командной строке MATLAB, вы не должны включать Если вы экспортируете определения метки от приложения для маркировки или создаете их использующий |
Description | Строки или векторы символов, которые описывают каждое определение метки. | Дополнительный Если вы составляете таблицу определений метки в командной строке MATLAB, вы не должны включать Если вы экспортируете определения метки от приложения для маркировки или создаете их использующий |
Hierarchy | Структуры, содержащие подметку и данные об атрибуте для каждого определения метки. Для примера Hierarchy формат, смотрите Начало работы с Image Labeler или Начало работы с Video Labeler. | Дополнительный В приложениях для маркировки, когда вы задаете подметки или атрибуты, экспортируемый |
Например, рассмотрите таблицу с определениями метки под названием Sky, Vegetation, Lanes, StopSign, и Vehicle, и это экспортировалось из приложения Video Labeler.
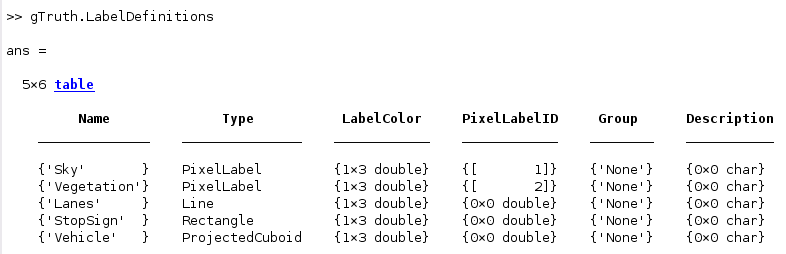
Определения метки включают пиксельные метки, таким образом, таблица включает PixelLabelID столбец.
Две из меток содержат атрибуты, таким образом, приложение создало Hierarchy столбец, который применяется через все определения метки.
Определения метки не имеют присвоенных групп, таким образом, Group столбцом является 'None' для всех определений метки.
Примечание
Приложения этикетировочной машины могут только загрузить пиксельные данные, которые имеют пиксельные идентификаторы между 1 и 255.
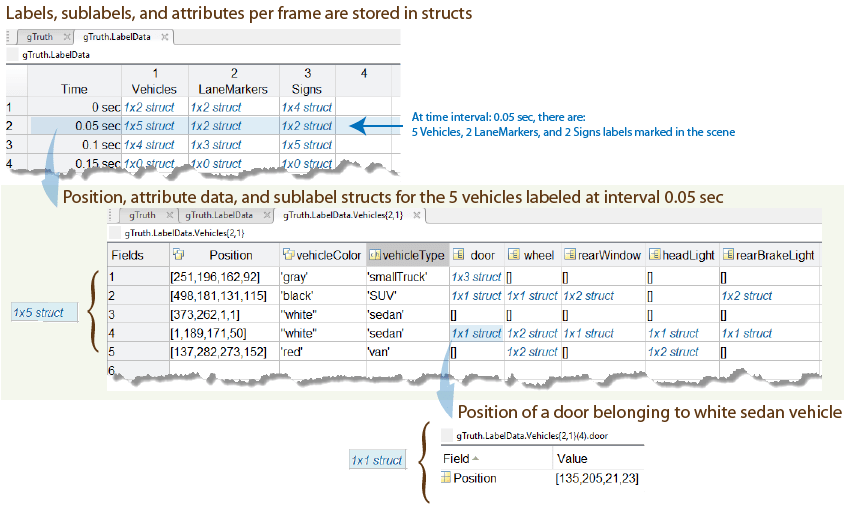
LabelData — Пометьте данные для каждого ROI и метки сценыЭто свойство доступно только для чтения.
Пометьте данные для каждого ROI и метки сцены в виде a table для коллекций изображений или a timetable для видео или последовательностей изображений. Каждый столбец LabelData содержит метки для одного определения метки и соответствует Name значение для каждой строки в LabelDefinitions. Они LabelData описывает элементы таблицы. Категории меток заданы как labelType перечисления.
В качестве альтернативы для данных о метке ROI, которые сгруппированы типом метки, отдельный столбец пометил ROILabelData, может использоваться и задаваться как структура, содержащая по крайней мере один тип метки, RectangleData, PolygonData, LineData, или ProjCuboidData.
Формат устройства хранения данных для каждого типа метки описан в таблице.
| Маркируйте Type | Формат устройства хранения данных для меток в каждой метке времени |
|---|---|
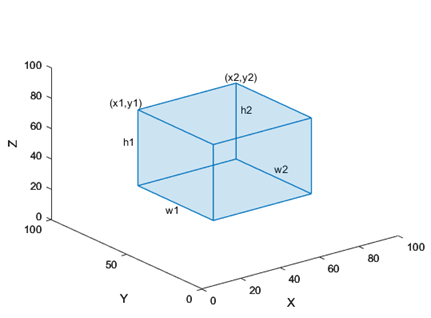
labelType.Rectangle |
|
|
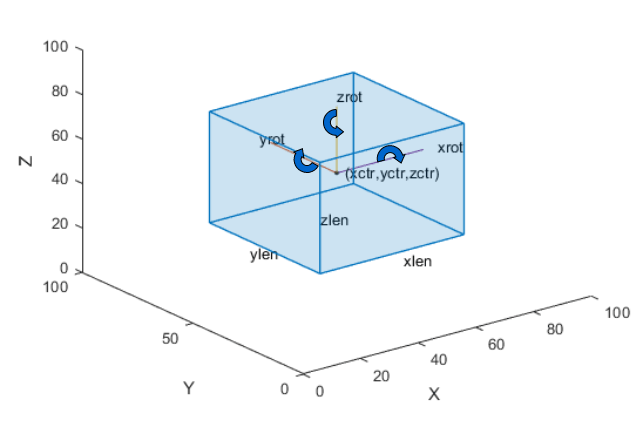
Рисунок показывает, как эти значения определяют положение кубоида.
|
|
Рисунок показывает, как эти значения определяют положение кубоида.
|
labelType.Line |
|
labelType.PixelLabel | Данные о метке для всех пиксельных определений метки хранятся в одном M-by-1 |
labelType.Polygon |
|
labelType.Custom | Метки хранятся точно так же, как они заданы в расписании. Если вы импортируете groundTruthMultisignal объект, содержащий пользовательские данные о метке в приложение Ground Truth Labeler, эти данные не импортированы в приложение. Используйте пользовательские данные при сборе данных о метке для обучения и объединении его с данными, помеченными в приложении. |
Поддерживаемые объекты GroundTruth
| Приложение Video Labeler | Приложение Image Labeler | |
|---|---|---|
| Источник данных | Видеофайл, папка последовательности изображений, пользовательский читатель | Файлы изображений |
| Определения меток | Rectangleстрока, PixelLabel, или Scene пометьте типы | Rectangleстрока, PixelLabel, или Scene пометьте типы |
| Данные Метки | Расписание Rectangleстрока, PixelLabel, или Scene пометьте типы | Таблица (никакое расписание) для Rectangleстрока, PixelLabel, или Scene пометьте типы |
Добавить достоверные данные, который не является ROI (Rectangleстрока, PixelLabel) или Scene категория меток к groundTruth возразите, предоставьте определению метки labelType это - Custom. Пользовательские данные не отображаются, когда вы загружаете их в приложение для маркировки.
selectLabelsByGroup | Выберите метки основной истины группой метки |
selectLabelsByType | Выберите метки основной истины типом метки |
selectLabelsByName | Выберите метки основной истины именем метки |
changeFilePaths | Измените пути к файлам в достоверных данных |
gatherLabelData | Соберите данные о метке из основной истины |
groundTruth объекты для основанных на видео источников данных используют возможности чтения видео вашей операционной системы. groundTruth созданное использование объекта источника видеоданных остается сопоставимым только для той же платформы, которая использовалась, чтобы создать его. Создать платформенно независимый groundTruth объект, преобразуйте видео в последовательность изображений и включайте связанные метки времени с последовательностью изображений.
pixelLabelTrainingData | objectDetectorTrainingData | pixelLabelDatastore | pixelLabelImageDatastore