Сегмент организовал 3-D данные об области значений в кластеры
labels = segmentLidarData(ptCloud,distThreshold)ptCloud в кластеры. Функция присваивает целочисленную кластерную метку каждой точке в облаке точек и возвращает кластерную метку всех точек в labels.
Функциональные группы две соседних точки в тот же кластер, если их Евклидово расстояние меньше distThreshold или если угол между датчиком и двумя соседними точками является по крайней мере 5 градусами.
labels = segmentLidarData(ptCloud,distThreshold,angleThreshold)angleThreshold.
[ также возвращает количество кластеров.labels,numClusters] = segmentLidarData(___)
[___] = segmentLidarData(___, также определяет минимальный и максимальный номер точек в каждом кластере в виде вектора с 2 элементами или как скалярное значение. Когда вы задаете NumClusterPoints=[1,Inf])NumClusterPoints как скаляр, максимальное количество точек в кластере неограниченно. Функция устанавливает labels к 0 когда кластеры находятся вне заданной области.
Создайте организованные синтетические данные о лидаре, содержащие два объекта.
ldr = zeros(5,100); ldr(:,1:50) = 10; ldr(:,51:end) = 20; pitch = linspace(-18,18,5); pitch = repmat(pitch',1,100); yaw = linspace(-90,90,100); yaw = repmat(yaw,5,1);
Преобразуйте в Декартовы координаты.
X = ldr .* cosd(pitch) .* sind(yaw); Y = ldr .* cosd(pitch) .* cosd(yaw); Z = ldr .* sind(pitch); pc = pointCloud(cat(3,X,Y,Z)); figure pcshow(pc.Location,'r') title('Unclustered Point Cloud')

Установите порог.
distThreshold = 5;
Сегментируйте данные о лидаре.
labels = segmentLidarData(pc,distThreshold);
Постройте график результатов.
figure hold on title('Segmented Clusters') pc1 = select(pc,find(labels == 1)); pcshow(pc1.Location,'g') pc2 = select(pc,find(labels == 2)); pcshow(pc2.Location,'y')

Настройте средство чтения файлов PCAP.
veloReader = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E');
Ожидайте в течение 0,3 секунд с начала файла, затем считайте облако точек из следующей системы координат.
veloReader.CurrentTime = veloReader.StartTime + seconds(0.3); ptCloud = readFrame(veloReader);
Сегмент и удаляет наземную плоскость.
groundPtsIdx = segmentGroundFromLidarData(ptCloud); ptCloudWithoutGround = select(ptCloud,~groundPtsIdx,'OutputSize','full');
Кластеризируйте остающиеся точки. Расстояние исчисляется в метрах.
distThreshold = 0.5; [labels,numClusters] = segmentLidarData(ptCloudWithoutGround,distThreshold);
Добавьте дополнительную метку для наземной плоскости.
numClusters = numClusters+1; labels(groundPtsIdx) = numClusters;
Постройте помеченные результаты. Отобразите наземную плоскость черного цвета цвета.
labelColorIndex = labels+1;
pcshow(ptCloud.Location,labelColorIndex)
colormap([hsv(numClusters);[0 0 0]])
title('Point Cloud Clusters')
ptCloud — Облако точекpointCloud объектОблако точек в виде pointCloud объект. ptCloud организованное облако точек, которое хранит координаты точки в M-by-N-by-3 матрица. Точки должны быть организованы тангажом и углами рыскания в последовательном порядке сканирования, который обычно получается из лазерных средств поиска области значений и velodyneFileReader.
distThreshold — Порог расстоянияПорог расстояния в мировых единицах измерения в виде неотрицательного скаляра. Смежные точки сгруппированы в тот же кластер, если расстояние между ними меньше порога расстояния. Чтобы сократить количество выходных кластеров, увеличьте значение distThreshold.
Типы данных: single | double
angleThreshold — Угловой порогУгловой порог, в градусах в виде скаляра в области значений [0, 180]. Чтобы сократить количество выходных кластеров, уменьшите значение angleThreshold. Смежные точки функциональных групп в тот же кластер, если угол, сформированный датчиком и точками, больше углового порога. Например, на рисунке, функциональных точках A групп и B в тот же кластер, если угол, сформированный датчиком, точка A и точка B, больше angleThreshold. Для получения дополнительной информации см. Алгоритмы. 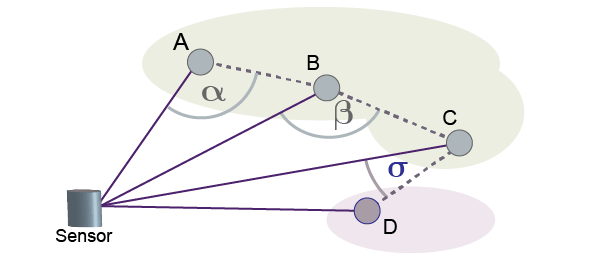
Типы данных: single | double
segmentLidarData функционируйте расстояние использования и угловые пороги к точкам граничения кластера. Функциональные группы две соседних точки в тот же кластер, если их Евклидово расстояние меньше входа distThreshold или если угол между датчиком и соседними точками больше или равен входу angleThreshold. Если вы не задаете angleThreshold, функция устанавливает этот угол на 5 степени.
Например, предположите angleThreshold установлен в 90. Поскольку углы α и β на рисунке оба больше, чем заданный порог 90 градусов, функциональных точек A групп, B, и C в тот же кластер. Поскольку угол σ меньше порога на 90 градусов, функциональной точки D групп в отдельный кластер. Каждый угол функциональное использование для кластеризации формируется линией с точки на датчик и линией от той же самой точки до соседней точки
[1] Bogoslavskyi, я. “Эффективная Онлайновая Сегментация для Разреженных 3D Лазерных Сканов”. Журнал Фотограмметрии, Дистанционного зондирования и Геоинформатики. Издание 85, Выпуск 1, 2017, стр 41–52.
pointCloud | pcsegdist | pcfitplane | velodyneFileReader | segmentGroundFromLidarData
