Обнаружьте объекты с помощью алгоритма Виолы - Джонса
Каскадный детектор объектов использует алгоритм Виолы - Джонса, чтобы обнаружить поверхности людей, носы, глаза, рот или верхнюю часть тела. Можно также использовать Image Labeler, чтобы обучить пользовательский классификатор использовать с этим Системным объектом. Для получения дополнительной информации о том, как функция работает, смотрите Начало работы с Каскадным Детектором объектов.
Обнаружить черты лица или верхнюю часть тела в изображении:
Создайте vision.CascadeObjectDetector объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?
detector = vision.CascadeObjectDetector
detector = vision.CascadeObjectDetector( создает детектор, сконфигурированный, чтобы обнаружить объекты, заданные вектором вводимого символа, model)model.
detector = vision.CascadeObjectDetector( создает детектор и конфигурирует его, чтобы использовать пользовательскую модель классификации, заданную с XMLFILE)XMLFILE входной параметр.
detector = vision.CascadeObjectDetector(Name,Value)detector = vision.CascadeObjectDetector('ClassificationModel','UpperBody')
Чтобы использовать объектную функцию, задайте Систему object™ как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Создайте объект детектора поверхности.
faceDetector = vision.CascadeObjectDetector;
Считайте входное изображение.
I = imread('visionteam.jpg');Обнаружьте поверхности.
bboxes = faceDetector(I);
Аннотируйте обнаруженные поверхности.
IFaces = insertObjectAnnotation(I,'rectangle',bboxes,'Face'); figure imshow(IFaces) title('Detected faces');

Создайте объект детектора тела и установите свойства.
bodyDetector = vision.CascadeObjectDetector('UpperBody');
bodyDetector.MinSize = [60 60];
bodyDetector.MergeThreshold = 10;Читайте вход отображают и обнаруживают верхнюю часть тела.
I2 = imread('visionteam.jpg');
bboxBody = bodyDetector(I2);Аннотируйте обнаруженные верхние части тела.
IBody = insertObjectAnnotation(I2,'rectangle',bboxBody,'Upper Body'); figure imshow(IBody) title('Detected upper bodies');

Этот объект использует каскад классификаторов, чтобы эффективно обработать области изображений для присутствия целевого объекта. Каждый этап в каскаде применяет все больше более комплексные бинарные классификаторы, который позволяет алгоритму быстро отклонять области, которые не содержат цель. Если требуемый объект не найден ни на каком этапе в каскаде, детектор сразу отклоняет область, и обработка отключена. Путем завершения объект старается не вызывать интенсивные расчетом классификаторы далее вниз каскад.

Детектор инкрементно масштабирует входное изображение, чтобы определить местоположение целевых объектов. В каждом шаге шкалы раздвижное окно, размер которого совпадает с учебным размером изображения, сканирует масштабированное изображение, чтобы определить местоположение объектов. ScaleFactor свойство определяет объем масштабирования между последовательным шагом.
Поисковый размер области связан с ScaleFactor следующим образом:
search region = round((ObjectTrainingSize) * (ScaleFactorN))

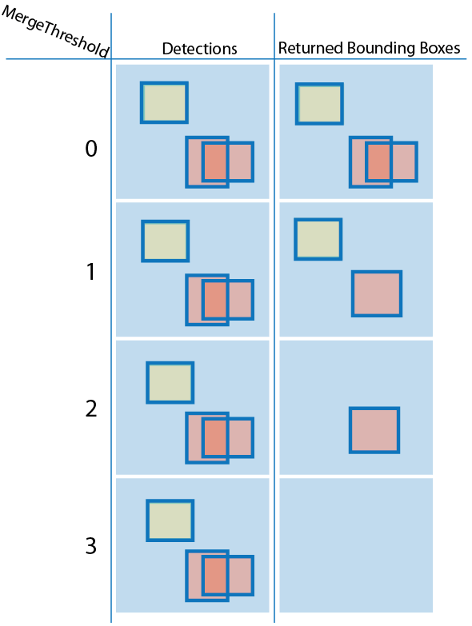
Окно поиска пересекает изображение для каждого масштабированного шага.
Для каждого шага по своим масштабам, окно поиска пересекает по изображению, производящему несколько обнаружений вокруг целевого объекта. Несколько обнаружений объединены в одну ограничительную рамку на целевой объект. Можно использовать MergeThreshold свойство управлять количеством обнаружений, требуемых прежде, чем объединиться или отклонить обнаружения. Размер итоговой ограничительной рамки является в среднем размерами ограничительных рамок для отдельных обнаружений и находится между MinSize и MaxSize.
[1] Линхарт Р., Куранов А. и В. Писаревский "Эмпирический анализ каскадов обнаружения повышенных классификаторов для быстрого обнаружения объектов". Продолжения 25-го симпозиума DAGM по распознаванию образов. Магдебург, Германия, 2003.
[2] Ojala Timo, Питикэинен Матти и Мэенпээ Топи, "Шкала полутонов Мультиразрешения и Классификация Структуры Инварианта Вращения с Локальными Бинарными Шаблонами". В Транзакциях IEEE согласно Анализу Шаблона и Искусственному интеллекту, 2002. Объем 24, Выпуск 7, стр 971-987.
[3] Краппа Х., Кастрийон-Сантана М. и Б. Шиле. "Быстрое и Устойчивое Открытие Поверхности через Локальный Контекст". Продолжения Объединенного Международного семинара IEEE на Визуальном Наблюдении и Оценке результатов деятельности Отслеживания и Наблюдении, 2003, стр 157–164.
[4] Кастрильон Марко, Дениз Оскар, Герра Кайетано и Эрнандес Марио, "ENCARA2: обнаружение в реальном времени нескольких поверхностей в различных разрешениях в видеопотоках". В Журнале Представления Визуальной связи и Изображения, 2007 (18) 2: стр 130-140.
[5] Ю Шики "Обнаружение Глаза". Домашняя страница Шики Ю. http://yushiqi.cn/research/eyedetection.
[6] Виола, Пол и Майкл Дж. Джонс, "Быстрое Обнаружение объектов с помощью Повышенного Каскада Простых Функций", Продолжения 2 001 Конференции Общества эпохи компьютеризации IEEE по Компьютерному зрению и Распознаванию образов, 2001. Объем: 1, pp.511–518.
[7] Dalal, N. и Б. Триггс, "Гистограммы Ориентированных Градиентов для Человеческого Обнаружения". Конференция Общества эпохи компьютеризации IEEE по Компьютерному зрению и Распознаванию образов. Объем 1, (2005), стр 886–893.
[8] Ojala, T., М. Питикэйнен и Т. Мэенпэа, "Шкала полутонов Мультиразрешения и Классификация Структуры Инварианта Вращения С Локальными Бинарными Шаблонами". Транзакции IEEE согласно Анализу Шаблона и Искусственному интеллекту. Объем 24, июль 2002 № 7, стр 971–987.
Image Labeler | trainCascadeObjectDetector | insertShape | vision.PeopleDetector | integralImage
